

KUKA机器人-基础坐标系$BASE V4.18版
描述
基础坐标
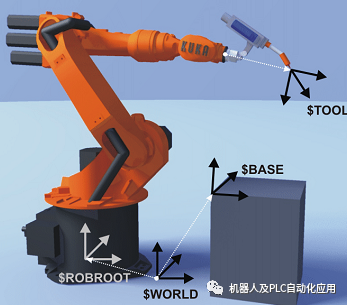
基础坐标系是一个笛卡尔坐标系,用来说明工件的位置。它以世界坐标系为参照基准。
在默认配置中,基础坐标系与世界坐标系是一致的。由用户将其移入工件。
$BASE
预运行中的 BASE 坐标系
结构类型 FRAME 的变量定义了工件相对于 WORLD 坐标系的设定点位置。
X , Y , Z : 沿轴的原点偏移 [mm]
A , B , C : 轴角度的旋转偏移 [°]
测量基准
在基准测量时,用户分配给工作面或工件一个笛卡尔坐标系 (BASE 坐标系)。BASE 坐标系的原点为用户指定的一个点。
基准测量的优点:
TCP 可以沿着工作面或工件的边缘手动运行。
可以参照基坐标对这些点示教。如果必须移动基坐标,例如由于工作面被移动,这些点也随之移动,但不必重新进行示教。
可以保存多少 BASE 坐标系取决于 WorkVisual 中的配置。默认:32 个 BASE坐标系。变量:BASE_DATA[1 … 32]。
有 2 种测量基坐标的方法:
3 点法
间接法
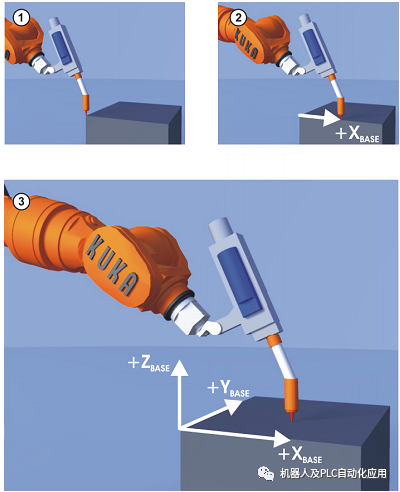
测定基坐标系。3 点法
移至新基础坐标系的原点和其它 2 个点。这 3 个点定义了新的基础系。
1. 选择已经测量过的工具编号。用按键 继续确认。
2. 用 TCP 驶至新基座的原点。点击测量。点击是确认安全询问。
3. 将 TCP 移至新基座正向 X 轴上的一个点。点击 测量。点击是确认安全询问。
4. 用 TCP 在 XY 平面上接近带正 Y 值的一点。点击 测量。点击是确认安全询问。
5. 在需要时,可以让测量点的坐标和姿态以增量和角度显示 (以法兰坐标系为基准)。为此按下测量点。然后通过返回返回到上一个视图。
6. 点击 保存。
测定基坐标系。间接法
当无法移入基准原点时,例如,由于该点位于工件内部,或位于机器人作业空间之外时,须采用间接的方法。
此时须移至基准的 4 个点,其坐标值必须已知。机器人控制系统将以这些点为基础对基准进行计算。
1. 选择已经测量过的工具编号。用按键 继续确认。
2. 输入新基坐标系的一个已知点的坐标,并用 TCP 移至该点。点击测量。点击是确认安全询问。
3. 把第4步重复三次。
4. 在需要时,可以让测量点的坐标和姿态以增量和角度显示 (以法兰坐标系为基准)。为此按下测量点。然后通过返回返回到上一个视图。
5. 点击 保存。
输入基准数值:已知下列数值,例如从 CAD 中获得:基座的原点与世界坐标系原点的距离基座坐标轴相对于世界坐标系的旋转运行方式 T1.
1. 在主菜单中选择 投入运行 > 测量 > 基坐标 > 数字输入。
2. 为待测定的基坐标系选择一个号码并给定一个名称。用按键 继续确认。
3. 输入数据。用按键 继续确认。
4. 点击 保存。
应用:
$BASE=$pos_act 将当前坐标值作为BASE 坐标系.
$BASE=BASE_DATA[1] 将BASE_DATE[1]的坐标值作为当前BASE坐标值.
实际操作获得BASE坐标:
工作台基坐标系的测量步骤
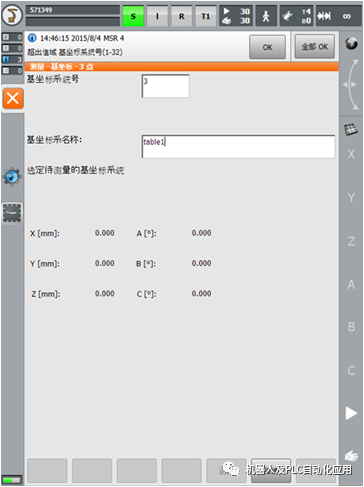
1)进入主菜单界面,依次选择“投入运行”、“测量”、“基坐标”,选择“3点法”。


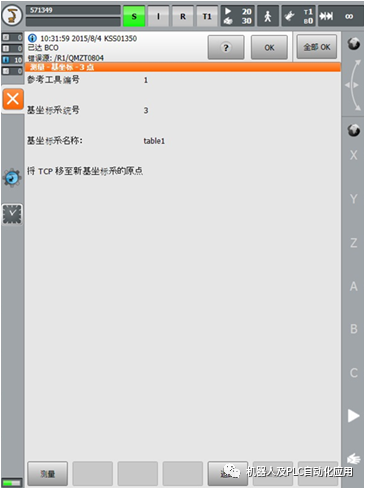
2)系统弹出基坐标编辑页面,给基坐标编号为“3”,命名为“table1”,然后单击“继续按钮”,进行下一步操作。
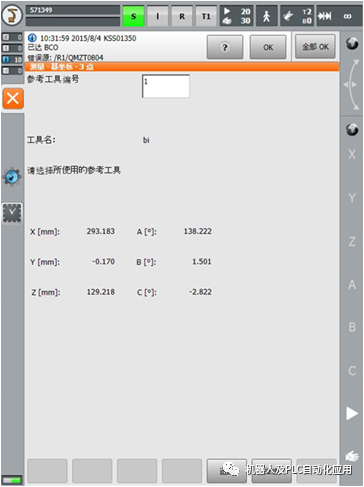
3)在弹出的参考工具页面上选择编号为“1”,名称为“bi”的工具,然后“继续”下一步。
4)系统弹出提示:将TCP移至新基坐标系的原点。
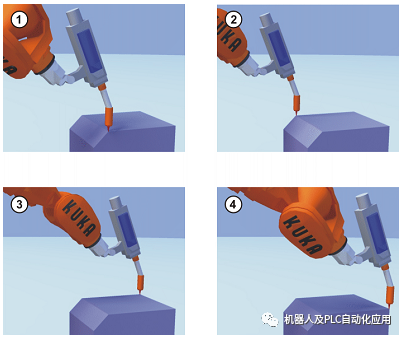
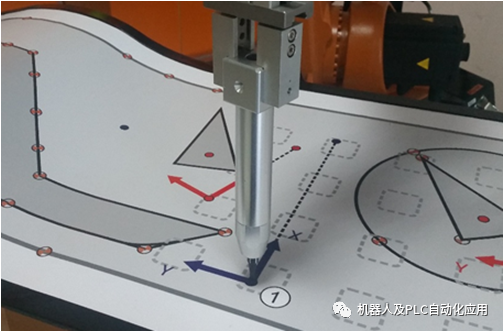
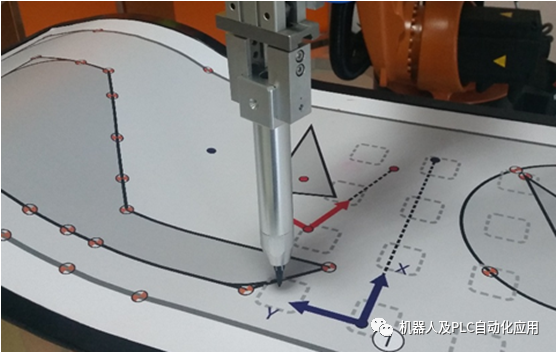
5)按照提示,将工具TCP移至工作台原点,原点位置如右图所示。
6)单击“测量”按钮,弹出选择对话框,选择“是”,确认采用当前位置。

7)系统出现提示:将TCP移至新基坐标系的X轴正方向上的一点。

8)按照系统提示,将工具TCP移至X轴正方向上一点,如左边图所示。
9)单击“测量”按钮,在弹出的对话框里选择“是”,确认采用当前位置。

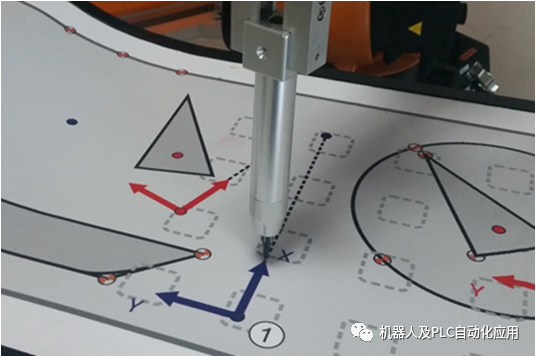
10)系统再次提示:将TCP移至新基坐标系XY平面上一个带有正Y值的点。

11)按系统提示,将工具TCP移至工作台+Y方向上一点,位置如左图所示。
12)第三点确定之后,单击“测量”按钮,并选择“是”以确认当前位置。

13)基坐标测量完成后,单击“保存”按钮,则数据被保存并采用。

-----------------END-------------------
审核编辑 :李倩
-
工业机器人常用坐标系介绍2017-02-19 35014
-
abb机器人工具坐标系问题2024-08-07 14514
-
机器人的坐标系的建立2013-06-10 3037
-
KUKA机器人问题解答2019-07-15 2628
-
介绍坐标系和机器人之间的纽带即连杆坐标系2021-09-01 1557
-
机器人基坐标系标定方法研究2018-03-07 1077
-
关于工业机器人的四类坐标系概述2018-10-05 28947
-
机器人4大坐标系讲解2019-05-14 24896
-
带你来剖析机器人的坐标系吧!2020-05-09 6209
-
KUKA C4机器人的轨迹BASE与TOOL坐标2020-12-23 7051
-
机器人坐标系用法和算法原理2023-05-11 2953
-
机器人坐标系选择指令和操作步骤2023-05-12 3630
-
焊接机器人坐标系有哪几种2023-10-18 1993
-
深度剖析机器人的四大坐标系2023-11-13 3326
-
机器人中都有哪些坐标系2023-11-22 3291
全部0条评论

快来发表一下你的评论吧 !
