

双视图几何:你真的理解吗?
描述
01 前言伯克利的马毅教授在线上开展了为期 2 周的暑期课程,课程主讲 3D视觉,课程涉及内容十分丰富,受限于版权原因可能不会公开,所有内容都可以在马老师的 «An invitation to 3D vision» 一书中进行深入了解。本篇博客重点解读 Two View Geometry 的部分内容,这也是马老师重点强调的内容。其实这部分内容在大多数课程和教材中都有涉及,很多人可能也觉得很简单,有一定的套路可言,但是如标题所说,你真的理解Two View Geometry吗?笔者曾面试过 DJI 以及 Nreal 两家很棒的公司,面试时都问到了这一部分,当时还觉得自己答得不错,但是听过马老师的课程之后发现,其实我也并不是很了解 Two View Geometry。接下来我会依据马老师的课件以及教材详细介绍 Two View Geometry, 在这之后的下一篇博客我会介绍一篇 CVPR 2021 的工作 Deep Two-View Structure-from-Motion Revisited,下面进入正式内容。02 Traditional Two View Geometry下面这张图是一个 Geometric Vision 的简略回顾: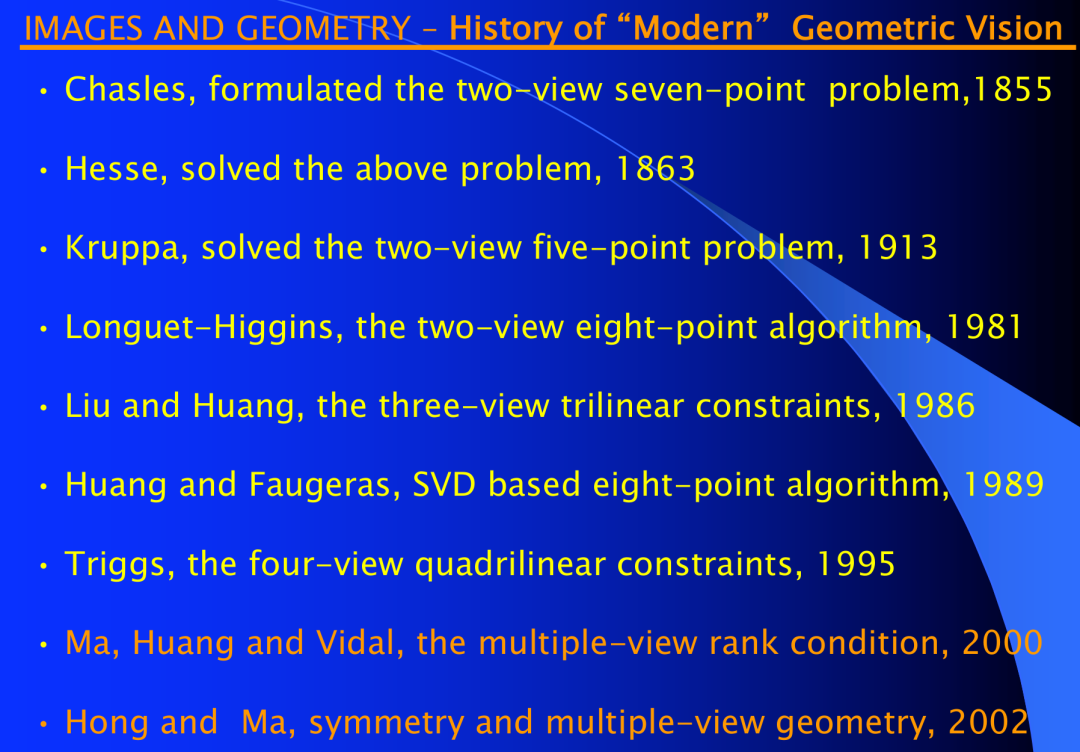 大致历程是:从双视图,到三视图四视图,再到统一的多视图。内容我们只涉及双视图的,按照书中的标题来说就是:Reconstruction from Two Calibrated Views. 所要做的事情就是,给定两张同一场景不同视角下拍摄到的图像,恢复出相机的位姿以及场景的结构。
大致历程是:从双视图,到三视图四视图,再到统一的多视图。内容我们只涉及双视图的,按照书中的标题来说就是:Reconstruction from Two Calibrated Views. 所要做的事情就是,给定两张同一场景不同视角下拍摄到的图像,恢复出相机的位姿以及场景的结构。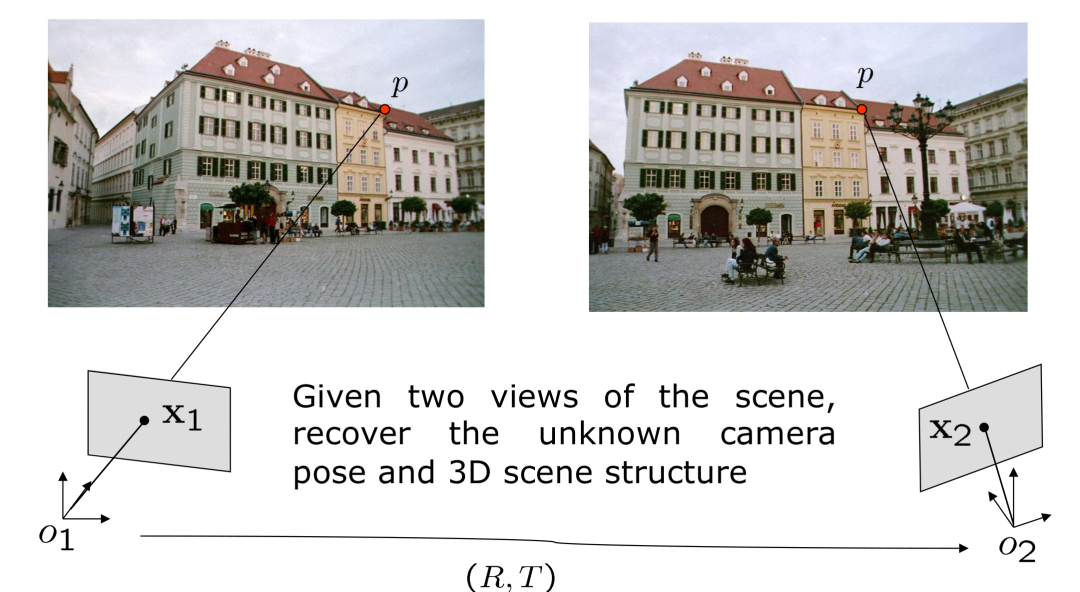 我们假设先前的预备工作已经准备充分,相机已经标定完成,correspondence 也已经匹配完成,那么不失一般性的可以用下面这个等式来进行表述:
我们假设先前的预备工作已经准备充分,相机已经标定完成,correspondence 也已经匹配完成,那么不失一般性的可以用下面这个等式来进行表述: 这里
这里 分别表示视角 1 以及视角 2 下,对空间中同一个点的观测,这里是使用归一化平面坐标进行表达,
分别表示视角 1 以及视角 2 下,对空间中同一个点的观测,这里是使用归一化平面坐标进行表达, 表示 对应的深度值,
表示 对应的深度值, 表示从视角 1 到视角 2 的 Rigid Body Motion。所谓恢复 motion 以及 structure 就是计算深度 以及变换。(1)式在有多次观测时, 是一直变化的,而相机运动却是始终不变的,为了追求统一,虽然说法有些哲学 (玄学),但是道理就是这么个道理,我们需要同时叉乘T ,消去场景结构带来的影响,然后就得到了著名的 Epipolar Geometry:
表示从视角 1 到视角 2 的 Rigid Body Motion。所谓恢复 motion 以及 structure 就是计算深度 以及变换。(1)式在有多次观测时, 是一直变化的,而相机运动却是始终不变的,为了追求统一,虽然说法有些哲学 (玄学),但是道理就是这么个道理,我们需要同时叉乘T ,消去场景结构带来的影响,然后就得到了著名的 Epipolar Geometry: 我们把
我们把 这个矩阵用
这个矩阵用 表示,并称之为Essential matrix. 这是Longuet-Higgins 在 1981 年发现的,感谢前人贡献。正如推导过程所阐述的,(2)式只与相机的运动有关, right? 并且因为(2)式右边为 0,说明这是一个齐次等式,乘以任意的常数依然正确,而 是观测,
表示,并称之为Essential matrix. 这是Longuet-Higgins 在 1981 年发现的,感谢前人贡献。正如推导过程所阐述的,(2)式只与相机的运动有关, right? 并且因为(2)式右边为 0,说明这是一个齐次等式,乘以任意的常数依然正确,而 是观测, ,因此常数只能给
,因此常数只能给 ,这也符合我们的常识,即单目相机没有办法恢复尺度。但是没有关系,we only care about the direction!对极几何还表达了一个重要的属性就是 3 点共面,
,这也符合我们的常识,即单目相机没有办法恢复尺度。但是没有关系,we only care about the direction!对极几何还表达了一个重要的属性就是 3 点共面, 表示了这个平面的法向量,right?所以在什么情况下,法向量与
表示了这个平面的法向量,right?所以在什么情况下,法向量与 点乘为0呢?只能是共面。可以看到,代数与几何是统一的,你甚至可以直接根据几何写出(2)式。对极几何的表达十分简洁,并且有许多有趣的性质:
点乘为0呢?只能是共面。可以看到,代数与几何是统一的,你甚至可以直接根据几何写出(2)式。对极几何的表达十分简洁,并且有许多有趣的性质: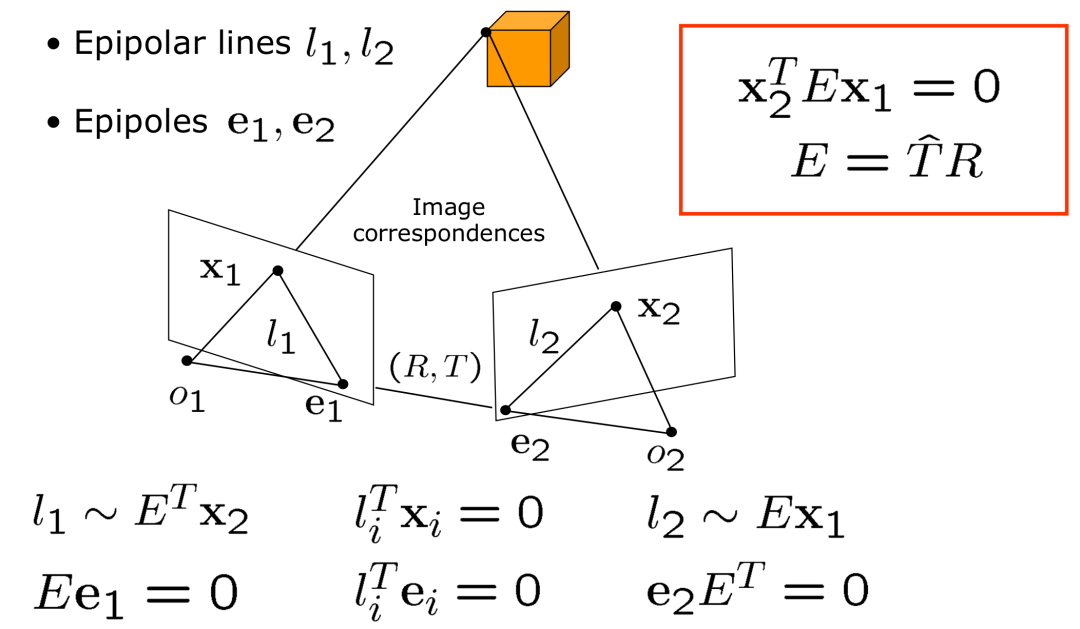 我们来稍加解读。按照上面的说法,对极几何其实表达的是三点共面,
我们来稍加解读。按照上面的说法,对极几何其实表达的是三点共面, 三个点会形成一个三角形,从而确定一个平面,不论空间点
三个点会形成一个三角形,从而确定一个平面,不论空间点 怎么变,
怎么变, 这条边是不变的。在几何层面,线和面不平行就会产生交点,我们称成像平面与的交点为
这条边是不变的。在几何层面,线和面不平行就会产生交点,我们称成像平面与的交点为 Epipoles:
Epipoles: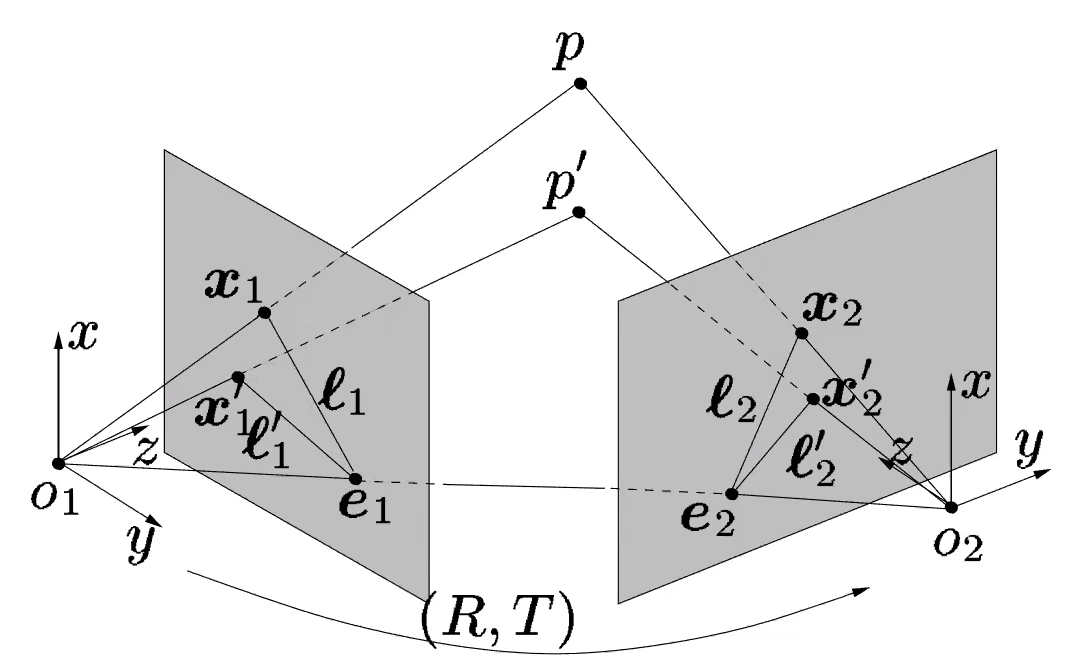 类似的你可以了解 Epipolar line 的定义。具体的性质可以参考马老师的书,这里我简单描述一下,
类似的你可以了解 Epipolar line 的定义。具体的性质可以参考马老师的书,这里我简单描述一下, 是极线,但是我们选择用三角形平面的法向量去描述极线,因为法向量确定了极线就唯一确定了。剩下的挨个理一下就通了。接下来难度会提升一些。对极几何很美,如何解呢?这个方程是 homo- geneous 的,因此E的自由度为最多为 8,事实上我们知道实际自由度是 5(旋转矩阵的自由度为 3,不考虑尺度因素,平移向量的自由度为 2),但是暂且不考虑这个。因此如果给定8对 correspondence(这里我们不考虑共线共面以及其他的corner case),至少E可以解出。接下来会面对两个问题:1. 怎么解呢?2. 假设你知道怎么解出,而实际应用中,我们的correspondence都是很 noise 的,这样得到的解也是带噪声的,那么如何把噪声去掉,得到一个干干净净的Essential Matrix呢?带着这些问题继续往下走。我们通过 8 个点对,解出的矩阵记作
是极线,但是我们选择用三角形平面的法向量去描述极线,因为法向量确定了极线就唯一确定了。剩下的挨个理一下就通了。接下来难度会提升一些。对极几何很美,如何解呢?这个方程是 homo- geneous 的,因此E的自由度为最多为 8,事实上我们知道实际自由度是 5(旋转矩阵的自由度为 3,不考虑尺度因素,平移向量的自由度为 2),但是暂且不考虑这个。因此如果给定8对 correspondence(这里我们不考虑共线共面以及其他的corner case),至少E可以解出。接下来会面对两个问题:1. 怎么解呢?2. 假设你知道怎么解出,而实际应用中,我们的correspondence都是很 noise 的,这样得到的解也是带噪声的,那么如何把噪声去掉,得到一个干干净净的Essential Matrix呢?带着这些问题继续往下走。我们通过 8 个点对,解出的矩阵记作 ,首先有一点你要了解,不是任何 3 × 3 的矩阵都能分解为这种形式的,的自由度是 6,如果 up to scale 的话,自由度则是 5,并且包含一个
,首先有一点你要了解,不是任何 3 × 3 的矩阵都能分解为这种形式的,的自由度是 6,如果 up to scale 的话,自由度则是 5,并且包含一个 的旋转矩阵部分,因此也是一个 special group,有其对应的空间 (essential space),或者说 5 维的流形上 (essential manifold),当有噪声时,得到的解会在这个空间外。为了便于表达,我们引入 normalized essential matrix 来消除尺度的干扰:
的旋转矩阵部分,因此也是一个 special group,有其对应的空间 (essential space),或者说 5 维的流形上 (essential manifold),当有噪声时,得到的解会在这个空间外。为了便于表达,我们引入 normalized essential matrix 来消除尺度的干扰: 在后文我们提到的
在后文我们提到的 不特殊说明都指的是 normalized essential matrix.我们希望能在 essential space 中找到一个距离F最“近”的解,然后将F投影到这个解上,如下图所示:
不特殊说明都指的是 normalized essential matrix.我们希望能在 essential space 中找到一个距离F最“近”的解,然后将F投影到这个解上,如下图所示: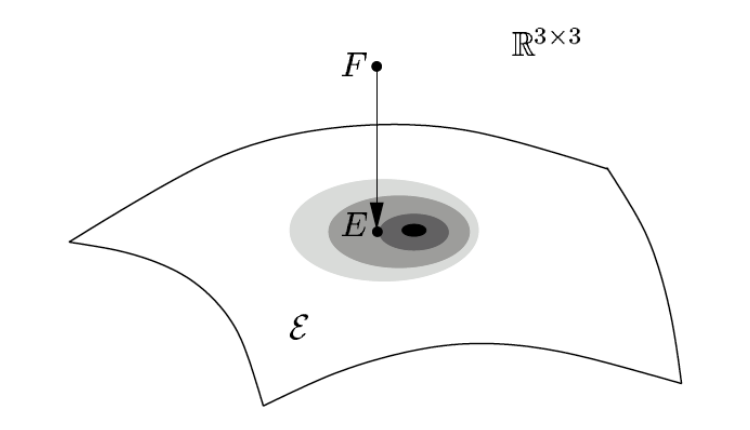 在说明怎样投影前,我们需要先给出三个定理:
在说明怎样投影前,我们需要先给出三个定理: 定理一描述了一个矩阵为 Essential Matrix 的充要条件。
定理一描述了一个矩阵为 Essential Matrix 的充要条件。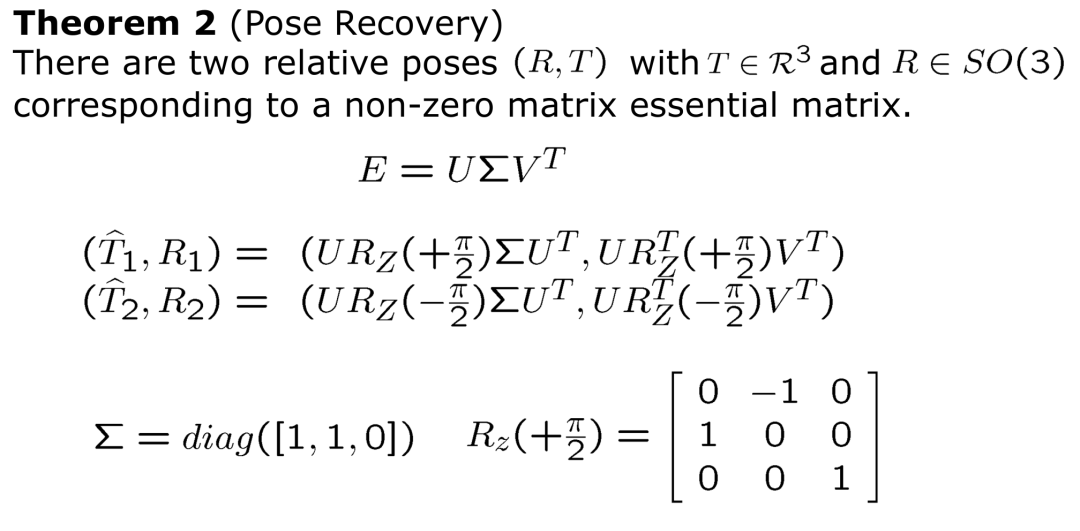 定理二描述了如何从 Essential Matrix 恢复到旋转矩阵以及平移方向向量。这里需要注意的是,normalized essential matrix 可以消除尺度的干扰,但是不能消除符号的干扰,代数角度而言,E 和 −E 都满足Epipolar Constraint,因此实际我们能得到四组解。
定理二描述了如何从 Essential Matrix 恢复到旋转矩阵以及平移方向向量。这里需要注意的是,normalized essential matrix 可以消除尺度的干扰,但是不能消除符号的干扰,代数角度而言,E 和 −E 都满足Epipolar Constraint,因此实际我们能得到四组解。 定理三给出了投影的方法,我们选择F-norm作为投影距离的度量指标。这里需要注意的是,
定理三给出了投影的方法,我们选择F-norm作为投影距离的度量指标。这里需要注意的是, 的SVD分解得到的
的SVD分解得到的 只满足正交性,不能满足行列式为+1的条件,当得到的
只满足正交性,不能满足行列式为+1的条件,当得到的 行列式为−1时,我们会对其取负,在后面我们会用代码具体解释。以上三个定理在马老师的书里都有详细证明,出于易读性的考虑后续会单独的整理到我的知乎上分享。在有了这三个定理之后,整个算法也就明朗了,流程如下:
行列式为−1时,我们会对其取负,在后面我们会用代码具体解释。以上三个定理在马老师的书里都有详细证明,出于易读性的考虑后续会单独的整理到我的知乎上分享。在有了这三个定理之后,整个算法也就明朗了,流程如下: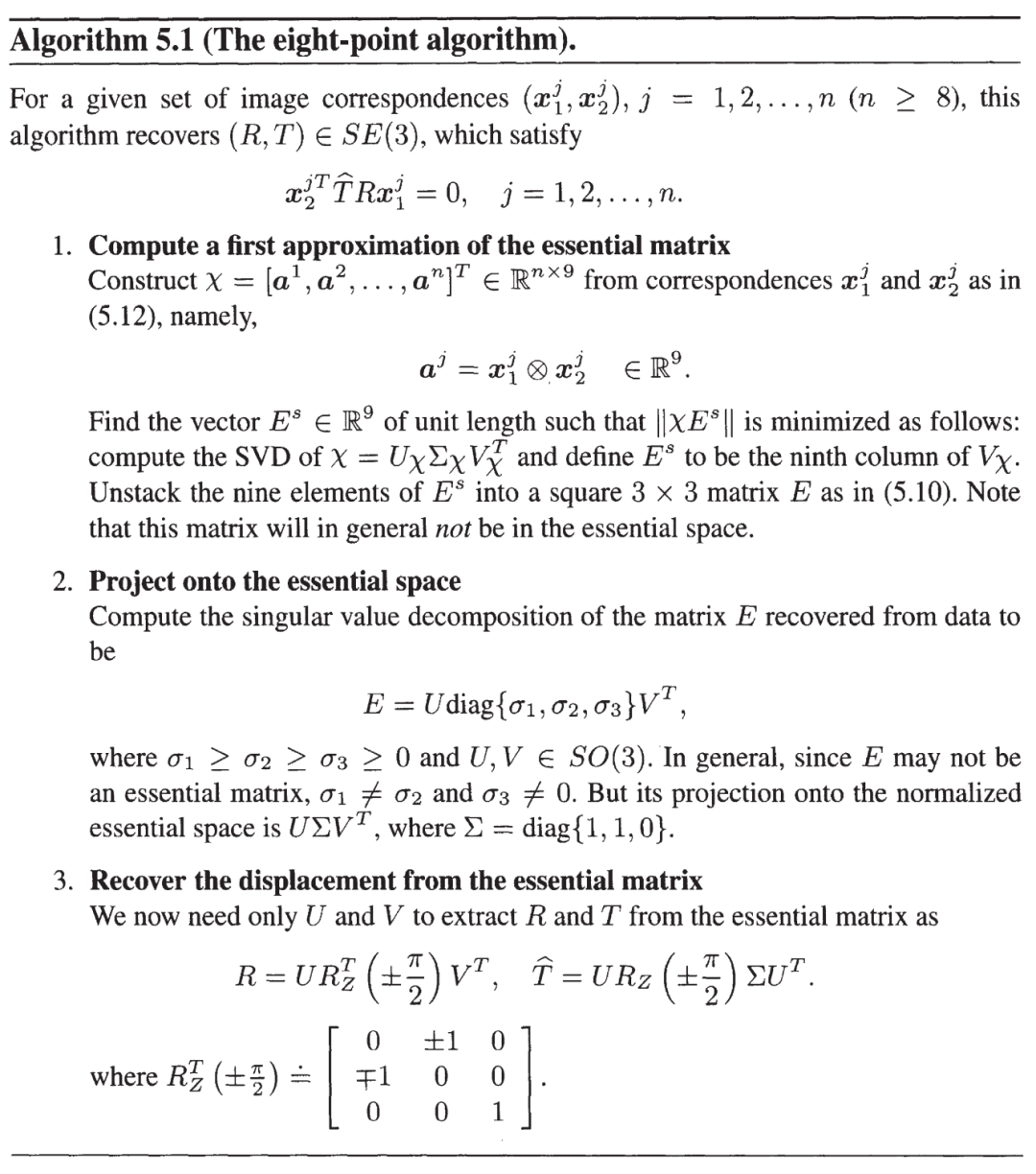 以上就是著名的八点法,你可以在许多资料上看到这个过程,本文的主要目的是梳理八点法的一些思路。我们引用一段 colmap 中的源码来解读上述过程:
以上就是著名的八点法,你可以在许多资料上看到这个过程,本文的主要目的是梳理八点法的一些思路。我们引用一段 colmap 中的源码来解读上述过程: 取
取 的最后一行可以留给读者作为一个思考题,提示是
的最后一行可以留给读者作为一个思考题,提示是  ,然后分析一下矩阵的秩。八点法十分简洁 (当然证明过程比较复杂),但是在实际使用过程中,还是会遇到许多问题的,我们在以下简要列举:1. Number of points. 由于 Normalized Essential Matrix 的自由度为 5,在比较 general 的情况下,最少选取的 correspondence 点对为 5(Kruppa在 1913 年的时候给出了五点法,类似八点法会产生 4 个满足对极约束的解,五点法会产生 10 个解),因此选取多少点是一个需要实际使用中考虑的问题。2. Number of solutions and positive depth constraint. 虽然八点法给出了四对解,但是实际上只有一个正确解,那么其他三个解怎么排除呢?首先从代数层面,不要忘了最原始的表达式
,然后分析一下矩阵的秩。八点法十分简洁 (当然证明过程比较复杂),但是在实际使用过程中,还是会遇到许多问题的,我们在以下简要列举:1. Number of points. 由于 Normalized Essential Matrix 的自由度为 5,在比较 general 的情况下,最少选取的 correspondence 点对为 5(Kruppa在 1913 年的时候给出了五点法,类似八点法会产生 4 个满足对极约束的解,五点法会产生 10 个解),因此选取多少点是一个需要实际使用中考虑的问题。2. Number of solutions and positive depth constraint. 虽然八点法给出了四对解,但是实际上只有一个正确解,那么其他三个解怎么排除呢?首先从代数层面,不要忘了最原始的表达式 ,在这个表达式中隐藏了一个很关键的约束,深度值应该为正,至于怎么求深度值是三角化部分的知识了,我们不在这里讨论,如果你对上述过程熟悉,不难发现就是一个叉乘的技巧。基于这一约束我们可以将正确的解筛选出来。而从几何层面来看,就是下面这张图 (From Multiple View Geometry in Computer Vision):
,在这个表达式中隐藏了一个很关键的约束,深度值应该为正,至于怎么求深度值是三角化部分的知识了,我们不在这里讨论,如果你对上述过程熟悉,不难发现就是一个叉乘的技巧。基于这一约束我们可以将正确的解筛选出来。而从几何层面来看,就是下面这张图 (From Multiple View Geometry in Computer Vision):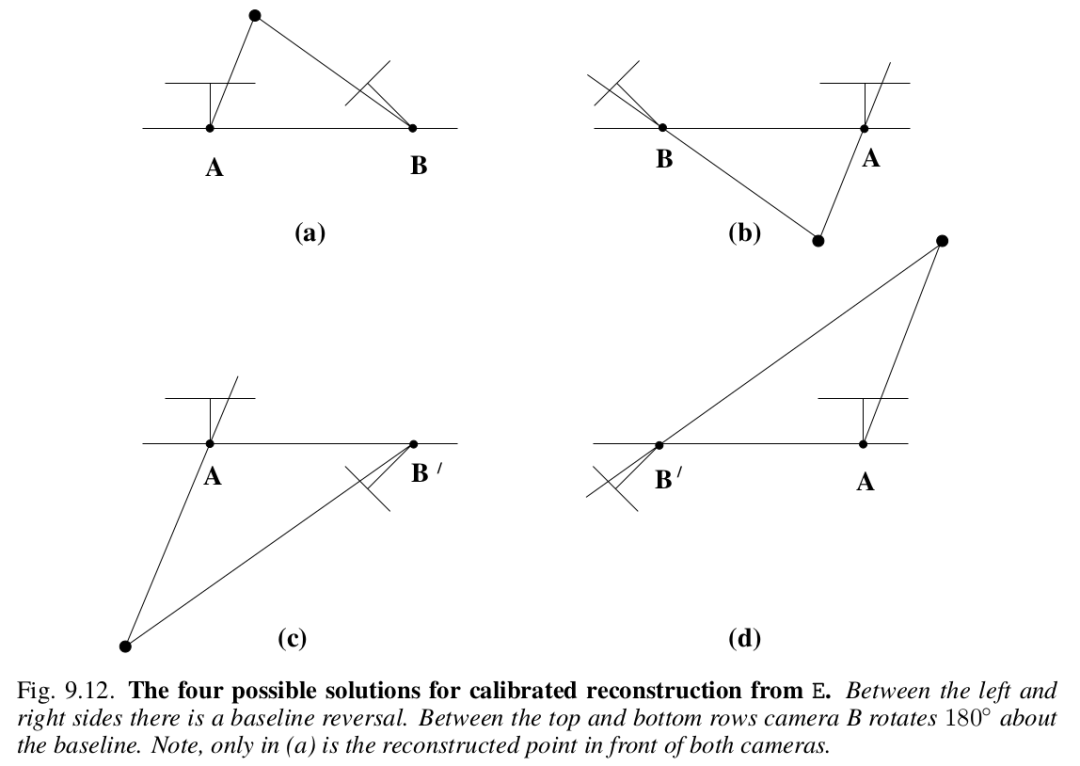 3. Structure requirement: general position.当观测到的空间点满足某些导致退化的条件时 (called critical surfaces),使用八点法会遇到解不唯一的情况。一个典型的例子就是观测点共面的情况,这种时候我们需要使用homography 来解决。4. Motion requirement: sufficient parallax.也就是说,平移量不能为0(为0时也要使用 homography)。需要十分小心的是,在没有平移移动且匹配十分 noise 的时候,八点法依旧会得到一个很奇怪的平移部分的解,而这个解是毫无意义的。5. Multiple motion hypotheses.运动物体场景,这又是另一个问题了。03 结语Essential Matrix 之所以叫 Essential Matrix,就是因为它太重要了, 马老师花了4节课的时间,介绍two view geometry的内容, 可见其重要性。目前学术的研究主要在于recognition的问题了,也有许多工作还是聚焦在end to end的执着,当然这只是我个人的一些粗浅的看法。审核编辑 :李倩
3. Structure requirement: general position.当观测到的空间点满足某些导致退化的条件时 (called critical surfaces),使用八点法会遇到解不唯一的情况。一个典型的例子就是观测点共面的情况,这种时候我们需要使用homography 来解决。4. Motion requirement: sufficient parallax.也就是说,平移量不能为0(为0时也要使用 homography)。需要十分小心的是,在没有平移移动且匹配十分 noise 的时候,八点法依旧会得到一个很奇怪的平移部分的解,而这个解是毫无意义的。5. Multiple motion hypotheses.运动物体场景,这又是另一个问题了。03 结语Essential Matrix 之所以叫 Essential Matrix,就是因为它太重要了, 马老师花了4节课的时间,介绍two view geometry的内容, 可见其重要性。目前学术的研究主要在于recognition的问题了,也有许多工作还是聚焦在end to end的执着,当然这只是我个人的一些粗浅的看法。审核编辑 :李倩
大致历程是:从双视图,到三视图四视图,再到统一的多视图。内容我们只涉及双视图的,按照书中的标题来说就是:Reconstruction from Two Calibrated Views. 所要做的事情就是,给定两张同一场景不同视角下拍摄到的图像,恢复出相机的位姿以及场景的结构。我们假设先前的预备工作已经准备充分,相机已经标定完成,correspondence 也已经匹配完成,那么不失一般性的可以用下面这个等式来进行表述:这里分别表示视角 1 以及视角 2 下,对空间中同一个点的观测,这里是使用归一化平面坐标进行表达, 表示 对应的深度值,表示从视角 1 到视角 2 的 Rigid Body Motion。所谓恢复 motion 以及 structure 就是计算深度 以及变换。(1)式在有多次观测时, 是一直变化的,而相机运动却是始终不变的,为了追求统一,虽然说法有些哲学 (玄学),但是道理就是这么个道理,我们需要同时叉乘T ,消去场景结构带来的影响,然后就得到了著名的 Epipolar Geometry:我们把 这个矩阵用表示,并称之为Essential matrix. 这是Longuet-Higgins 在 1981 年发现的,感谢前人贡献。正如推导过程所阐述的,(2)式只与相机的运动有关, right? 并且因为(2)式右边为 0,说明这是一个齐次等式,乘以任意的常数依然正确,而 是观测,,因此常数只能给,这也符合我们的常识,即单目相机没有办法恢复尺度。但是没有关系,we only care about the direction!对极几何还表达了一个重要的属性就是 3 点共面,表示了这个平面的法向量,right?所以在什么情况下,法向量与点乘为0呢?只能是共面。可以看到,代数与几何是统一的,你甚至可以直接根据几何写出(2)式。对极几何的表达十分简洁,并且有许多有趣的性质:我们来稍加解读。按照上面的说法,对极几何其实表达的是三点共面,三个点会形成一个三角形,从而确定一个平面,不论空间点怎么变,这条边是不变的。在几何层面,线和面不平行就会产生交点,我们称成像平面与的交点为 Epipoles:类似的你可以了解 Epipolar line 的定义。具体的性质可以参考马老师的书,这里我简单描述一下,是极线,但是我们选择用三角形平面的法向量去描述极线,因为法向量确定了极线就唯一确定了。剩下的挨个理一下就通了。接下来难度会提升一些。对极几何很美,如何解呢?这个方程是 homo- geneous 的,因此E的自由度为最多为 8,事实上我们知道实际自由度是 5(旋转矩阵的自由度为 3,不考虑尺度因素,平移向量的自由度为 2),但是暂且不考虑这个。因此如果给定8对 correspondence(这里我们不考虑共线共面以及其他的corner case),至少E可以解出。接下来会面对两个问题:1. 怎么解呢?2. 假设你知道怎么解出,而实际应用中,我们的correspondence都是很 noise 的,这样得到的解也是带噪声的,那么如何把噪声去掉,得到一个干干净净的Essential Matrix呢?带着这些问题继续往下走。我们通过 8 个点对,解出的矩阵记作,首先有一点你要了解,不是任何 3 × 3 的矩阵都能分解为这种形式的,的自由度是 6,如果 up to scale 的话,自由度则是 5,并且包含一个 的旋转矩阵部分,因此也是一个 special group,有其对应的空间 (essential space),或者说 5 维的流形上 (essential manifold),当有噪声时,得到的解会在这个空间外。为了便于表达,我们引入 normalized essential matrix 来消除尺度的干扰:在后文我们提到的不特殊说明都指的是 normalized essential matrix.我们希望能在 essential space 中找到一个距离F最“近”的解,然后将F投影到这个解上,如下图所示:在说明怎样投影前,我们需要先给出三个定理:定理一描述了一个矩阵为 Essential Matrix 的充要条件。定理二描述了如何从 Essential Matrix 恢复到旋转矩阵以及平移方向向量。这里需要注意的是,normalized essential matrix 可以消除尺度的干扰,但是不能消除符号的干扰,代数角度而言,E 和 −E 都满足Epipolar Constraint,因此实际我们能得到四组解。定理三给出了投影的方法,我们选择F-norm作为投影距离的度量指标。这里需要注意的是,的SVD分解得到的只满足正交性,不能满足行列式为+1的条件,当得到的行列式为−1时,我们会对其取负,在后面我们会用代码具体解释。以上三个定理在马老师的书里都有详细证明,出于易读性的考虑后续会单独的整理到我的知乎上分享。在有了这三个定理之后,整个算法也就明朗了,流程如下:以上就是著名的八点法,你可以在许多资料上看到这个过程,本文的主要目的是梳理八点法的一些思路。我们引用一段 colmap 中的源码来解读上述过程:
void DecomposeEssentialMatrix (
const Eigen : : Matrix3d& E, Eigen : : Matrix3d∗ R1,
Eigen : : Matrix3d∗ R2, Eigen : : Vector3d∗ t )
{
// 根据对极约束得到的带噪声的E做SVD分解
Eigen::JacobiSVD svd(
E, Eigen : : ComputeFullU | Eigen : : ComputeFullV ) ;
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV().transpose();
// 保证行列式符号为正
if (U.determinant() < 0) {
U ∗= −1;
}
if (V.determinant() < 0) {
V ∗= −1;
}
Eigen : : Matrix3d W;
W<< 0, 1, 0, −1, 0, 0, 0, 0, 1;
∗R1 = U ∗ W ∗ V;
∗R2=U∗W.transpose() ∗V;
∗t = U. col (2). normalized ();
}
void PoseFromEssentialMatrix ( const Eigen : : Matrix3d& E,
const std : : vector& points1 ,
const std : : vector& points2 ,
Eigen : : Matrix3d∗ R, Eigen : : Vector3d∗ t ,
std : : vector∗ points3D ) { 7
CHECK_EQ(points1 . size () , points2 . size ());
Eigen::Matrix3d R1;
Eigen::Matrix3d R2;
DecomposeEssentialMatrix(E, &R1, &R2, t );
// Generate all possible projection matrix combinations.
const std : : array R_cmbs{{R1, R2, R1, R2}};
const std : : array t_cmbs{{∗t , ∗t , −∗t , −∗t }};
...
}
这里为什么取的最后一行可以留给读者作为一个思考题,提示是 ,然后分析一下矩阵的秩。八点法十分简洁 (当然证明过程比较复杂),但是在实际使用过程中,还是会遇到许多问题的,我们在以下简要列举:1. Number of points. 由于 Normalized Essential Matrix 的自由度为 5,在比较 general 的情况下,最少选取的 correspondence 点对为 5(Kruppa在 1913 年的时候给出了五点法,类似八点法会产生 4 个满足对极约束的解,五点法会产生 10 个解),因此选取多少点是一个需要实际使用中考虑的问题。2. Number of solutions and positive depth constraint. 虽然八点法给出了四对解,但是实际上只有一个正确解,那么其他三个解怎么排除呢?首先从代数层面,不要忘了最原始的表达式,在这个表达式中隐藏了一个很关键的约束,深度值应该为正,至于怎么求深度值是三角化部分的知识了,我们不在这里讨论,如果你对上述过程熟悉,不难发现就是一个叉乘的技巧。基于这一约束我们可以将正确的解筛选出来。而从几何层面来看,就是下面这张图 (From Multiple View Geometry in Computer Vision):3. Structure requirement: general position.当观测到的空间点满足某些导致退化的条件时 (called critical surfaces),使用八点法会遇到解不唯一的情况。一个典型的例子就是观测点共面的情况,这种时候我们需要使用homography 来解决。4. Motion requirement: sufficient parallax.也就是说,平移量不能为0(为0时也要使用 homography)。需要十分小心的是,在没有平移移动且匹配十分 noise 的时候,八点法依旧会得到一个很奇怪的平移部分的解,而这个解是毫无意义的。5. Multiple motion hypotheses.运动物体场景,这又是另一个问题了。03 结语Essential Matrix 之所以叫 Essential Matrix,就是因为它太重要了, 马老师花了4节课的时间,介绍two view geometry的内容, 可见其重要性。目前学术的研究主要在于recognition的问题了,也有许多工作还是聚焦在end to end的执着,当然这只是我个人的一些粗浅的看法。审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何通俗理解视觉定位?带你看懂对极几何与基本矩阵2019-06-01 2681
-
频率和时序,你是否真的了解呢?2021-06-18 1654
-
PCB设计规则你知几何2021-11-11 1511
-
你的隔离电源真的OK么2021-12-27 1487
-
你真的懂Word吗2022-01-12 1648
-
你是否真的理解点灯了2022-01-24 694
-
你真的理解SPI是怎么通信的吗2022-02-17 1063
-
如何才能看懂电子元器件规格书里的三视图2011-11-09 36152
-
第16章iOS视图及视图控制器2017-04-11 1067
-
车身周围:从鱼眼视图到鸟瞰全景视图2020-05-30 3015
-
Python爬虫 你真的会写爬虫吗?2019-05-02 4870
-
阻抗的概念,你真的懂了吗?2019-07-02 17282
-
你真的懂CPU大小端模式吗?2020-02-27 3835
-
多表物化视图的需求分析及实现应用设计2022-11-17 2043
-
基于几何变换器的2D-to-BEV视图转换学习2023-06-06 2686
全部0条评论

快来发表一下你的评论吧 !
