

脉冲雷达信号处理概述
电子说
描述
编者:对于信号处理来说,雷达和通信一直是一体两面,从MIMO通信到MIMO雷达,从OFDM通信到Multicarrier雷达,很多通信和雷达领域的前沿技术都存在事实上的相互影响。本篇文章将会介绍刘凡博士在IEEE Communications Letters发表的系列约稿里的第一篇,雷达基本原理。在此感谢刘凡博士不辞劳苦的中文翻译工作,以及在雷达领域科普的精神和努力
本文旨在面向通信背景的读者简明扼要地概括脉冲雷达信号处 理中的基本问题和方法 。
由于篇幅所限,本文将不会对相关问题做深入讨论。有兴趣的读者可以进一步阅读本文后面的参考文献。
 脉冲雷达基本模型
脉冲雷达基本模型
1. 基本原理
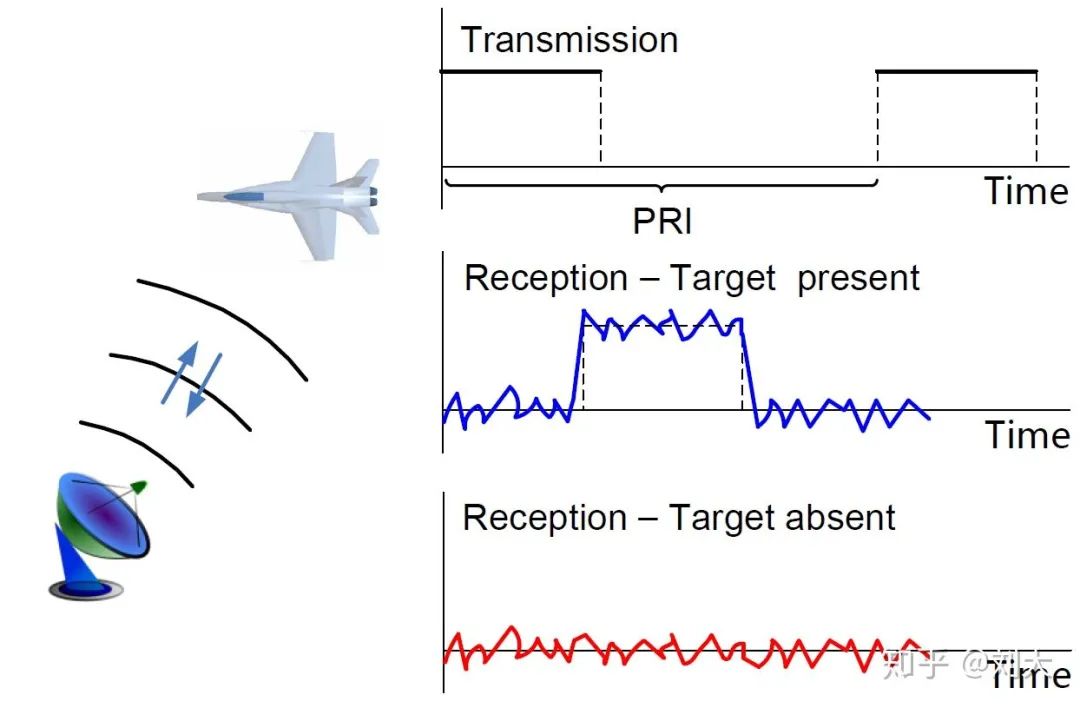
如上图所示,脉冲式雷达的基本工作流程,我们可以做如下阐述:
雷达首先发射一个探测脉冲,脉冲信号到达目标后被目标反射至雷达端。这一回波中包含了目标距离、速度、角度等参数信息。雷达的任务是对回波进行处理提取出目标信息,从而对目标进行定位或跟踪。
由于雷达周期性地发射信号并接收回波,这一发射-接收循环通常被称为脉冲重复周期(Pulse Repetition Interval, PRI)。类似地,一秒钟发射的脉冲个数被定义为脉冲重复频率(Pulse Repetition Frequency, PRF)。

配图仅为示意
那么延续前文思路,我们如何给出简洁的雷达建模?



注意:除了噪声以外,雷达还会收到来自其他方位的干扰信号。这些干扰可以来自其他信号源,也可以是不感兴趣的目标或者障碍物反射至雷达的回波。一般将后者称为 杂波 (Clutter) 。通常需要对杂波进行抑制,以免对感兴趣的目标造成干扰。
受限于篇幅,我们将不在此文中讨论杂波抑制问题。
2.目标检测问题
通常我们认为,雷达信号处理关心两类基本问题: 检测 (Detection)和 估计 (Estimation)。
其中,最简单的检测问题一般只考虑目标是否存在,通常可以建模为如下二元假设检验(Binary Hypothesis Testing):


那么如何求解呢?

这一过程可以表示为


常用的检测器包括似然比检验(Likelihood Ratio Test, LRT),广义似然比检验(Generalized Likelihood Ratio Test, GLRT),Rao检验(Rao Test)和Wald检验(Wald Test)等。
此外,为衡量目标检测的好坏,人们提出了多种评价指标来描述检测器的性能,最为常用的是检测概率(Detection Probability)和虚警概率(False-Alarm Probability)。


除以上概率指标外,通常还关心所谓的 漏警概率 (False-Dismissal Probability),即存在目标但雷达判断目标不存在的概率,可记为
。
注意相比于漏警,虚警对雷达造成的伤害更大。因为一旦判断目标存在,雷达就要动用硬件和信号处理资源来对目标进行进一步探测与跟踪,虚警情形下,这将造成雷达资源的严重浪费。
有鉴于此,目标检测器的设计通常需要遵循所谓的奈曼-皮尔逊准则(Neyman-Pearson Criterion)。简言之,即在给定最小可容忍恒虚警概率的条件下最大化检测概率。
3. 参数估计问题



在实际情况中,一般需要针对这些参数设计独立的估计器,我们分别对此进行阐述。

- 对于速度估计,由于单个脉冲持续时间较短,其多普勒相移难以识别,通常需要接收多个脉冲的回波确保多普勒相移积累得足够大,再通过快速傅里叶变换(Fast Fourier Transform, FFT)来估计多普勒频率。这部分称为慢时间(Slow-Time)信号处理,即以一个脉冲对应一个慢时间单位的脉冲间信号处理。
- 对于角度估计,可以采用经典的基于子空间的到达角估计算法,例如MUSIC或者ESPIRIT。
估计器的性能通常可以用均方误差(Mean Squared Error, MSE)进行描述。以角度估计为例,其均方误差定义为


作为一种替代手段,经常考虑的一个经典的性能指标是所谓的克拉美-罗下界(Cramér–Rao Lower Bound, CRLB)。简而言之,克拉美-罗界是所有无偏估计器的方差的下界(无偏估计定义为估计值的数学期望为真值的估计器,因此其方差等于MSE)。
这一下界指出,无偏估计器的估计方差应至少与Fisher信息(Fisher Information)的逆相当,即

4. 总结
本文对脉冲式雷达的基本原理进行了简介,并重点介绍了雷达信号处理的两个基本问题:目标检测与参数估计。
由于篇幅所限,本文所考虑的只是最基本的点目标模型,对于雷达系统中的其他重要概念,如杂波干扰、扩展目标(Extended Target)、波形设计等均未作介绍。
-
什么是脉冲雷达2024-10-15 4165
-
单脉冲雷达是指什么?2023-03-30 8628
-
FMCW和线性调频脉冲雷达2022-07-26 6315
-
脉冲雷达和调频连续波雷达的区别2022-04-20 9079
-
如何生成精确的调频载波和线性调频脉冲雷达测试信号?(二)2022-03-07 1461
-
高频脉冲雷达物位计具有哪些应用优势和特点2020-11-28 4987
-
脉冲雷达的优点,脉冲波形参数2020-11-16 11581
-
科普-脉冲雷达的基础知识2020-10-30 3180
-
脉冲雷达的优势_脉冲雷达的波形参数2020-10-16 8632
-
雷达系统的组成2019-06-06 4465
-
雷达信号处理基础_部分12016-04-05 1468
-
一种低重频脉冲雷达的速度解算方法2012-05-25 897
-
基于无载频脉冲雷达信号等幅度追踪法检测生命信号2009-11-18 667
全部0条评论

快来发表一下你的评论吧 !

{kind=link}