

紧凑低成本非制冷长波红外连续变焦光学设计
描述
在非制冷红外热像仪方面,相对于已模块化的非制冷探测器及成像电路,光学系统在减轻产品质量、缩小体积尺寸、降低成本价格方面发挥重要作用,成为降低整机SWaP-C(Size、Weight、Power and Cost)特征的主要因素。
设计轻小型、低成本、高性能的非制冷红外光学系统需要考虑以下几个方面:透镜数量少、光学系统总长短、大物镜直径小、较高的光学调制传递函数(MTF)以及环境适应性好。
据麦姆斯咨询报道,近期,昆明物理研究所的科研团队在《红外与激光工程》期刊上发表了以“紧凑低成本非制冷长波红外连续变焦光学设计”为主题的文章。该文章第一作者为唐晗高级工程师,主要从事红外光机系统技术的研究工作。
本文引入三组联动变焦技术平衡像差及压缩系统总长,采用变F#设计技术约束系统大物镜直径,通过主动补偿的无热化技术实现系统在高低温情况下成像清晰,构建四片透镜架构的非制冷长波红外连续变焦光学系统,该系统具有总长短、成本低、环境适应性好、性能高等特点,能在手持侦察设备或无人系统平台中得到广泛应用,满足日益增长的市场需求。
三组联动连续变焦模型
三组联动连续变焦系统是通过三个透镜组在轴向连续移动改变光学系统组合焦距,同时保持像面位置不动并在连续变焦过程中成像质量良好的机械补偿变焦系统。三组联动连续变焦光学系统常见形式是由前固定组、变倍组、补偿组、第二补偿组和后固定组五组透镜组成。通过建立数学模型能快速分析变焦过程,确定变焦系统高斯光学参数,得到近轴光学初始架构。三组联动连续变焦系统运动模型如图1所示。
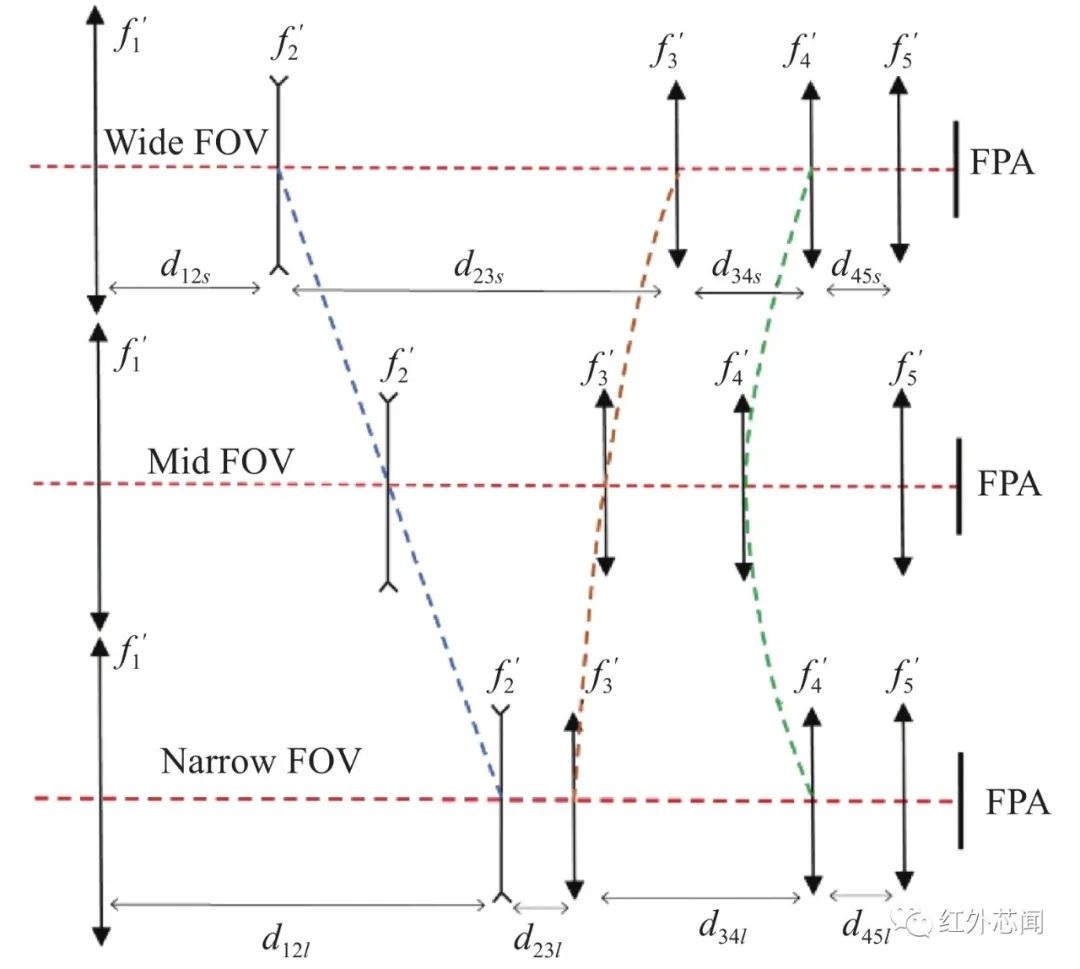
图1 三组联动连续变焦系统原理图
采用微分方程分析变焦核的三个组元—变倍组、补偿组及第二补偿组的运动规律。根据三组联动变焦模型,利用公式,通过编程迭代求出满足指标要求的各组元光焦度分配及光学元件位置间隔。
光学系统评价与分析
设计流程
非制冷长波红外连续变焦光学系统设计流程如图2所示。首先,根据三组联动连续变焦模型编制计算程序,依据设计指标从系统总长、光焦度分配、零件间隔等方面优选初始光学架构,建立理想光学模型;其次,根据元件光焦度合理选型选材,设置评价函数进入优化和全局优化;再次,依据评价函数收敛结果评价常温及高低温环境成像质量;然后进入公差分析环节,使得系统达到加工装配要求的容差范围,其中评价函数修改优化、像质评价及公差分析环节反复多次迭代,直至达到设计技术指标要求;最后,开展系统变焦曲线重整化操作,完成系统设计。
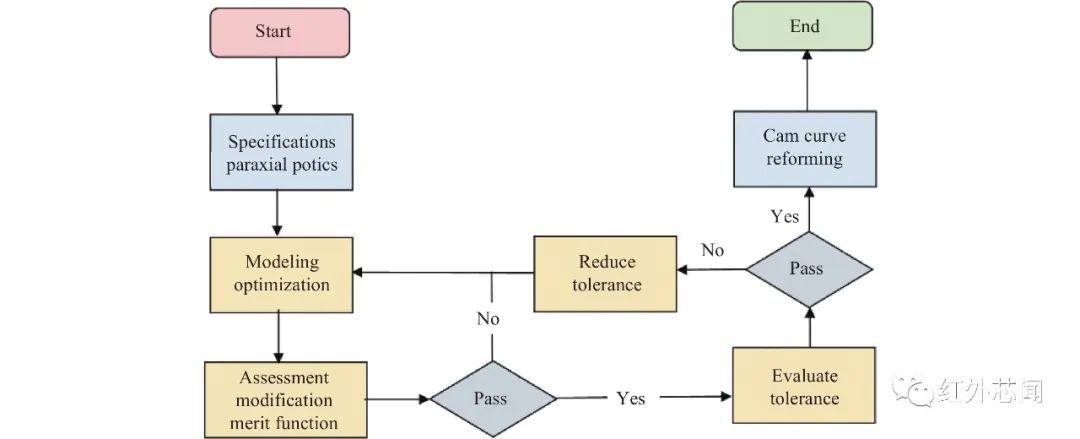
图2 连续变焦光学系统设计流程图
设计指标
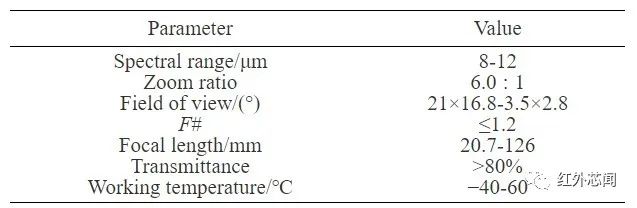
根据目前市场主流的640×512@12 μm非制冷氧化钒焦平面探测器,设计了一款紧凑低成本、高透过率、全温度范围使用的非制冷长波红外连续变焦光学系统。系统主要技术指标见表1。
表1 光学系统技术指标
设计过程
按照设计流程,首先根据三组联动连续变焦模型,编制三组联动变焦系统初始参数计算程序。依据光学系统设计指标,求解连续变焦系统高斯光学参数(即元件光焦度、间隔分配)建立近轴光学系统。三组联动连续变焦系统含有五个组元,若要实现四片透镜架构需要减去一个组元,从校正像差难易程度分析,第二补偿组兼具后固定组平衡像差的能力,减去后固定组是合理可行的。
考虑设置孔径光阑位置。孔径光阑位置对大物镜直径及系统像差平衡有显著影响。经分析,将孔径光阑设置在补偿组上,能有效减少大物镜直径,降低像差校正难度。采用固定口径光阑,通过变F#设计技术使得系统F#随系统视场变化,结合成像电路自动增益算法减轻变F#带来的影响。
将程序计算的各焦距段参数输入光学辅助设计软件系统,设置多重结构,根据各组元光焦度合理选择透镜形状、透镜材料并设置优化评价函数,设置二元衍射面和高次非球面,以提供更多的优化变量及设计自由度,提升光学系统成像质量。系统在三个焦距位置(短焦距20.7 mm、中焦距80 mm、长焦距126 mm)的初始架构如图3所示。
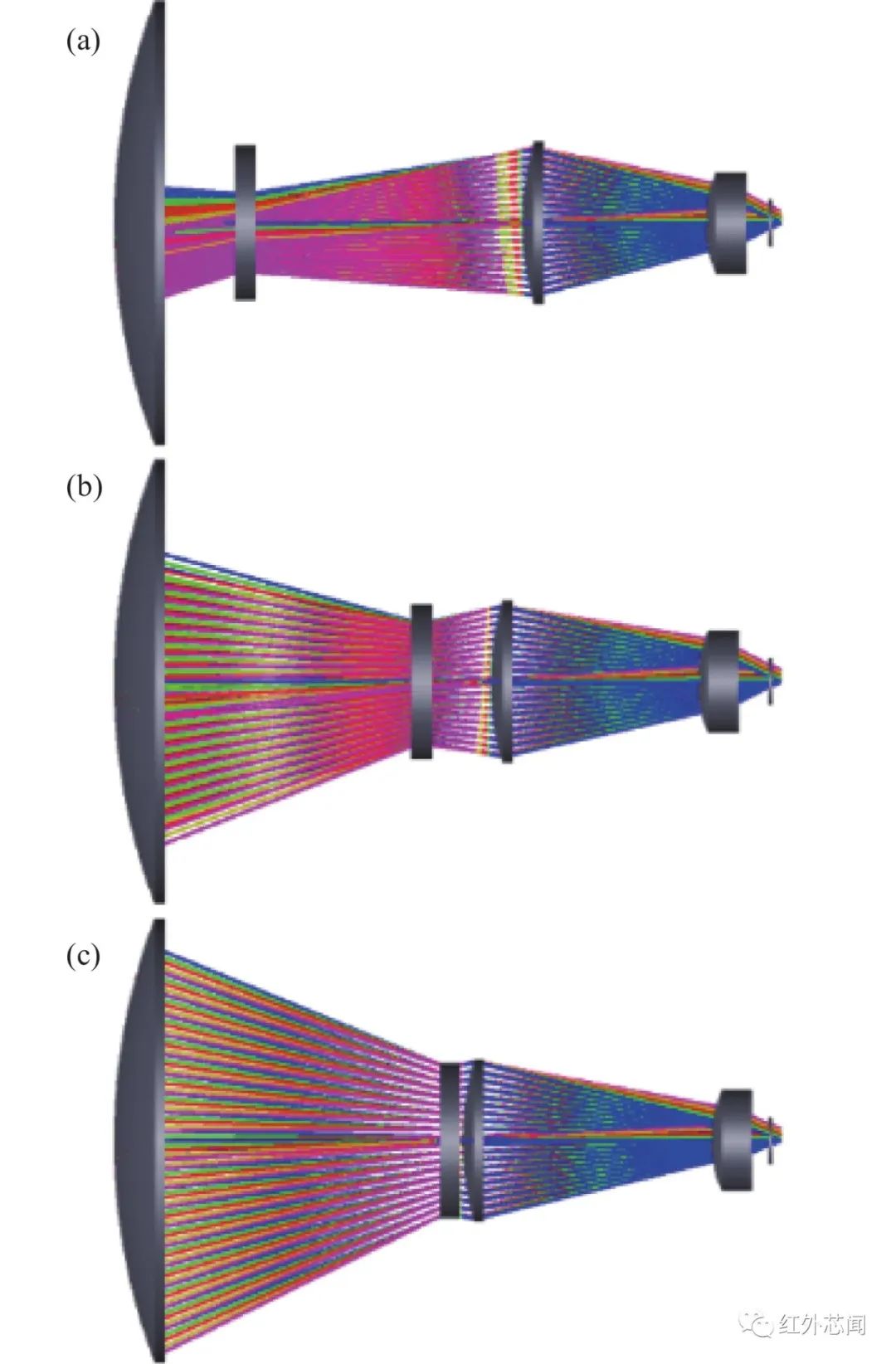
图3 连续变焦光学多重系统图
设计结果
紧凑低成本非制冷长波红外连续变焦光学系统最终设计结果如图4所示。整个系统共采用四片透镜,最大透镜加工直径为116 mm,光学系统总长为180 mm,光学零件总质量为418 g,远摄比为1.44。前固定组是正光焦度的锗透镜;变倍组为负光焦度的锗透镜;补偿组为正光焦度的锗透镜;第二补偿组为正光焦度低温度折射系数的硫系玻璃透镜。系统共采用一个二元衍射面和三个非球面,将第二补偿组作为调整环节,用于系统主动消热及视距调焦。孔径光阑设置于补偿组前表面,在大视场到小视场连续变焦过程中,系统F#线性变化范围为1.05~1.2,焦距变化范围为20.7~126 mm,对应视场变化范围为21°×16.8°~3.5°×2.8°,变焦过程连续、像质良好,符合设计指标要求。
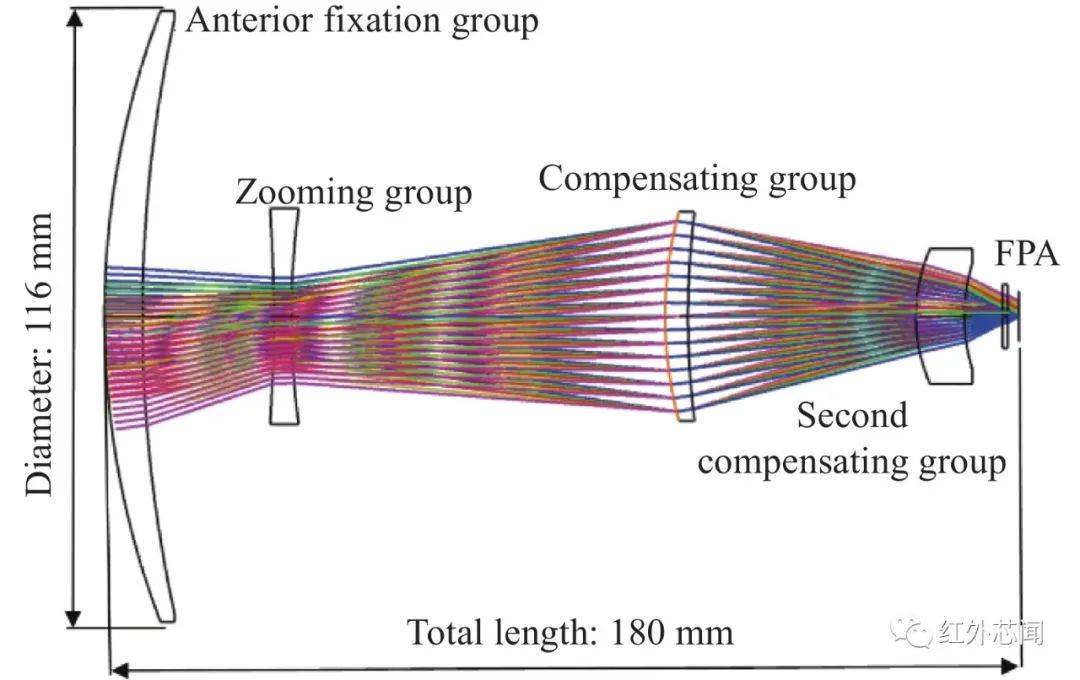
图4 连续变焦光学系统布局图
光学系统评价与分析
系统常温像质评价
光学调制传递函数:理想光学系统对应的MTF即为系统传函衍射极限。光学系统MTF如图5所示。系统在三个焦距状态的MTF接近衍射极限,成像质量良好。
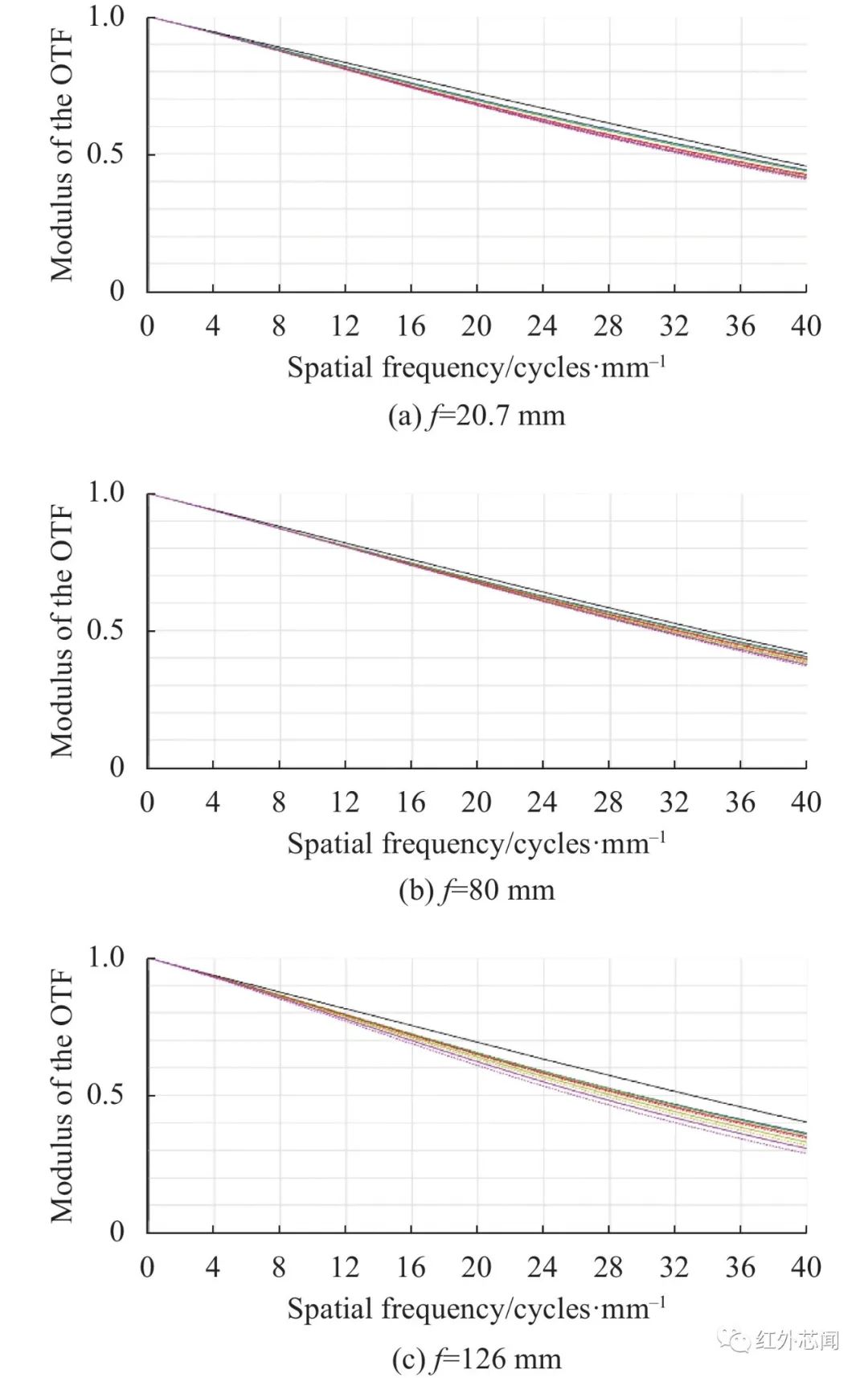
图5 连续变焦光学系统MTF曲线
点列图:光学系统以主光线的交点为参考点,计算与该点最远的点对应的距离为弥散斑(SPT)几何半径,同时用最小二乘算法计算各点和参考点的平均距离,称为弥散斑均方根(RMS)半径。光学系统点列图如图6所示,系统在三个视场下的最大弥散斑RMS半径值为6.8 μm,表明系统成像清晰,满足使用要求。
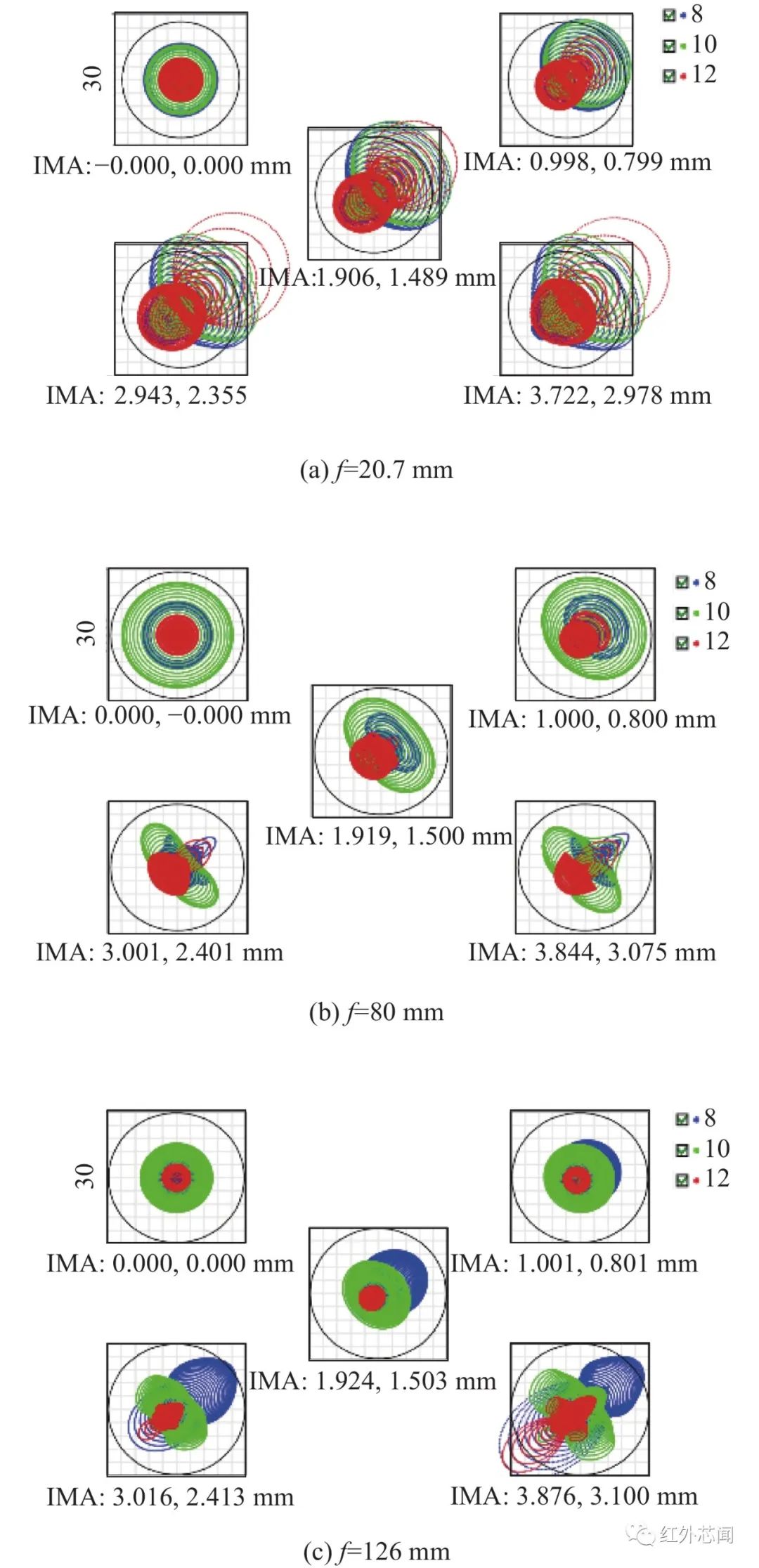
图6 连续变焦光学系统点列图
畸变:为理想像高与实际主光线高度的差。光学系统畸变情况如图7所示,在小视场时,最大畸变为0.92%,在大视场时,最大畸变为3.08%,该系统在连续变焦过程中畸变对成像无明显影响。
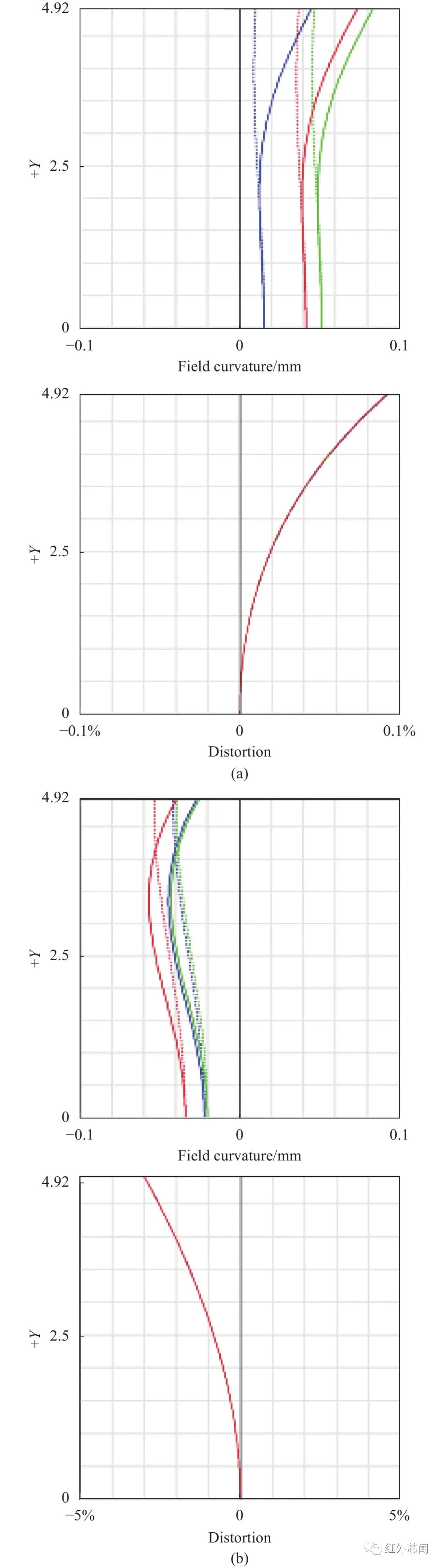
图7 连续变焦光学系统小视场 (a)及大视场 (b)畸变情况
系统高低温像质评价
非制冷长波红外连续变焦光学系统因相对孔径大、常用透镜材料温度折射率系数大等因素,影响光学系统在高低温环境中的成像质量。该系统采用主动补偿技术,即通过移动第二补偿组使光学系统在−40~+60 ℃温度范围成像质量满足使用要求。
图8为系统在长焦126 mm及短焦20.7 mm时在高低温下经补偿后的光学调制传递函数。图9为系统在长焦126 mm及短焦20.7 mm时在高低温下经补偿后的系统点列图。从高低温传函图及点列图中可以看出,连续变焦系统通过主动补偿在−40~+60 ℃范围内成像质量满足使用要求。
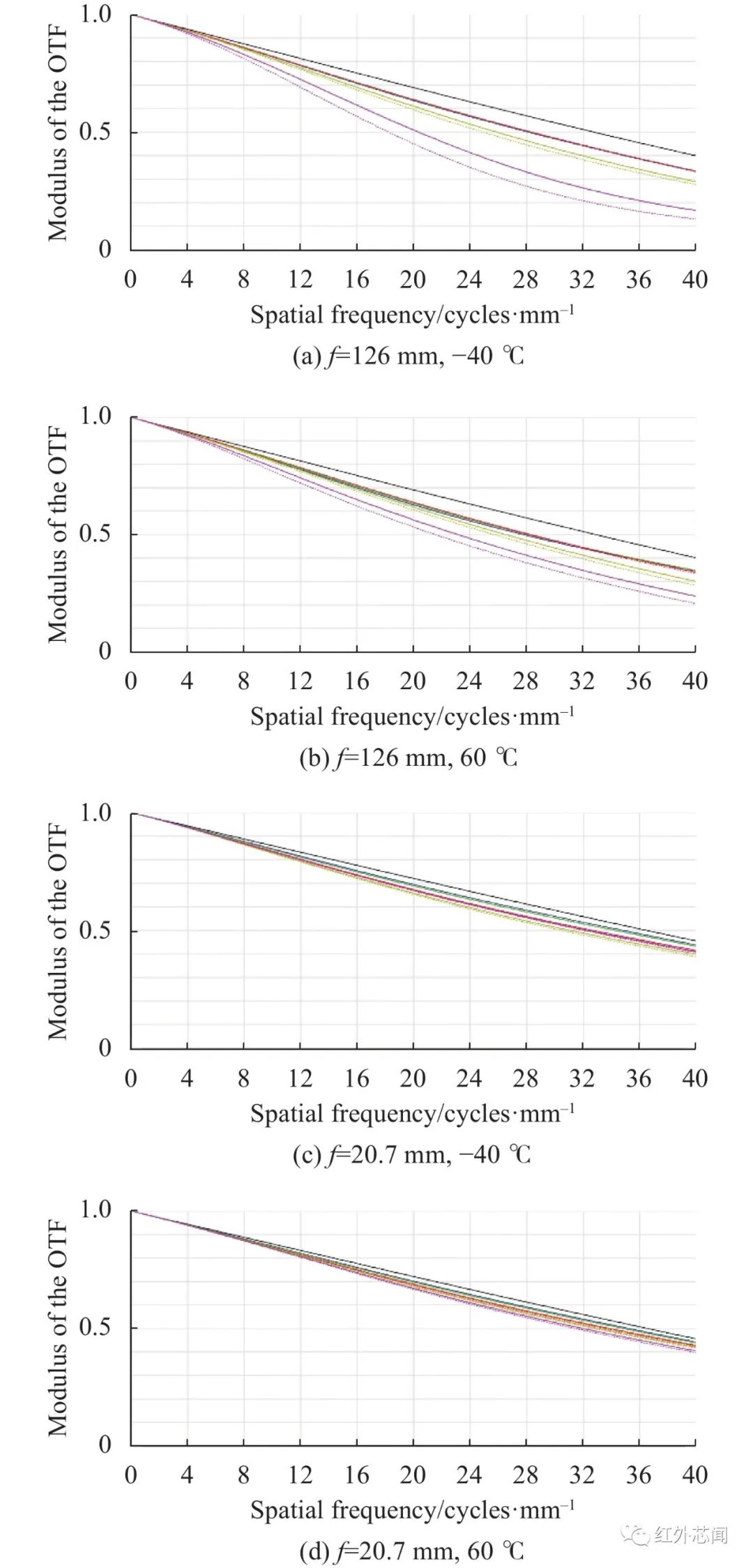
图8 高低温环境连续变焦光学系统MTF曲线
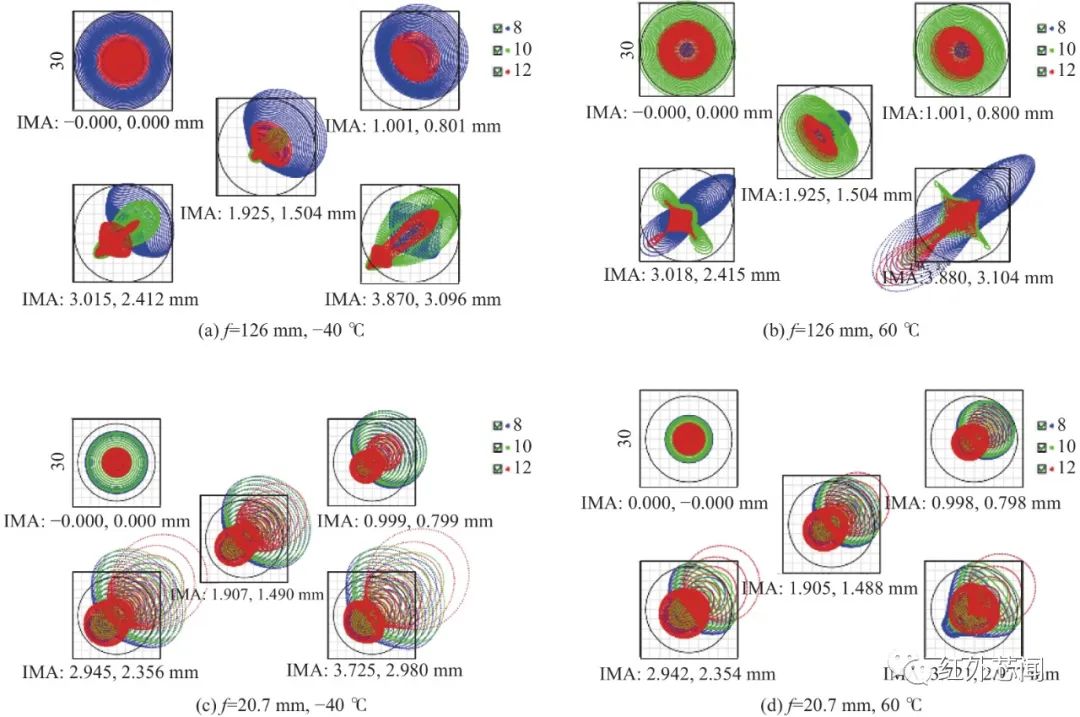
图9 高低温环境连续变焦光学系统点列图
光学系统公差分析
公差分析能够充分评价各项公差对光学系统成像质量的影响,并评估光学零件加工工艺、光机装调的难易程度。对系统成像质量影响较大的制造公差、组装公差要适当调整,并需要多次迭代优化。
光学设计软件运用统计算法对公差进行预估。对于中、高精度光学系统,按照表2修改默认公差表,在系统小视场常温状态采用灵敏度分析得到统计的误差评估表,其中公差最严重项目如图10所示。
表2 常用Zemax公差表
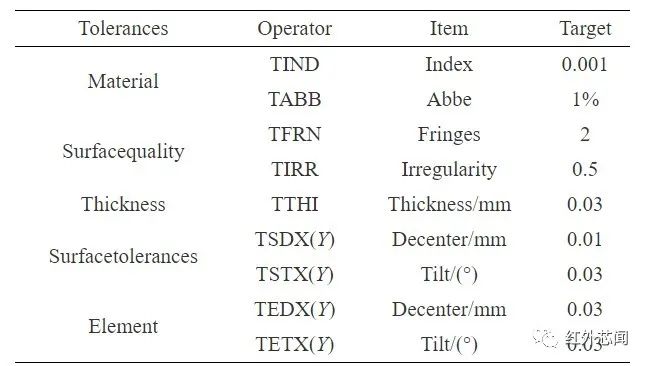
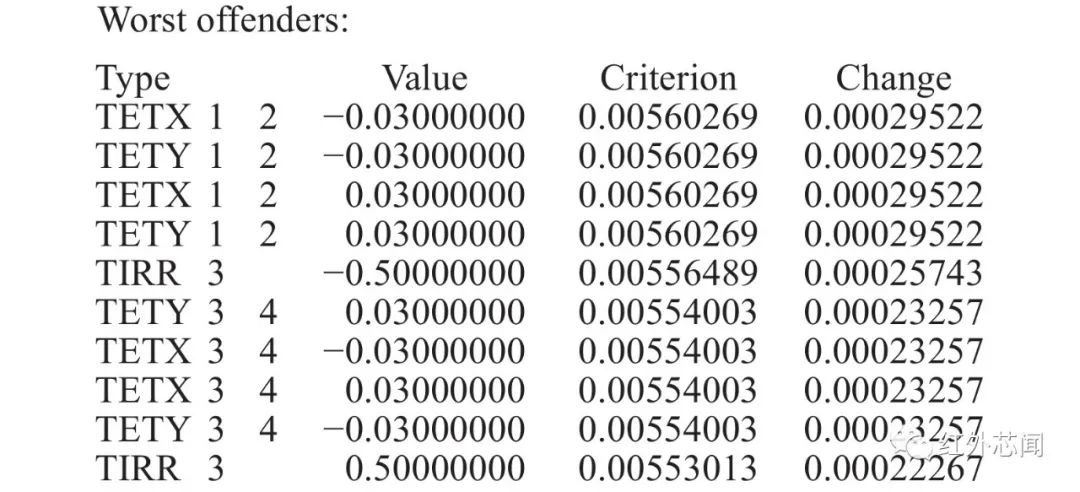
图10 最严重项目
从图10可以看出,第一透镜、第二透镜的倾斜与第二透镜前表面的光圈局部公差为“最严重项目”,但对系统成像质量影响较小,容差可控。
图11、图12分别为系统弥散斑RMS及MTF公差分析结果。从图11可知,系统弥散斑RMS半径的设计值为5.3 μm、改变量统计平均值为0.78 μm以及加工装配后弥散斑RMS半径的估计值为6.09 μm,较好地满足实际使用。从图12可知,系统40 lp/mm处的MTF设计值为0.358,改变量为0.0227,加工装配后MTF的估计值为0.336,满足实际使用需求。

图11 弥散斑RMS半径估计值

图12 MTF估计值
系统二元衍射面加工分析
系统在补偿组前表面引入一个二元衍射面用于平衡倍率色差,在锗基底上引入的二元衍射面参数为Norm Radius=22 mm,H1=−10.53,H2=−1.48。计算得到二元衍射面的环带数为1,环带深度为3.18 μm。二元衍射面的位相及周期同元件直径的关系如图13所示,锗基底二元衍射面可采用单点金刚石车削加工。该二元衍射元件衍射环带少,基底材料硬度低,加工简单,成本与非球面透镜相差不大。
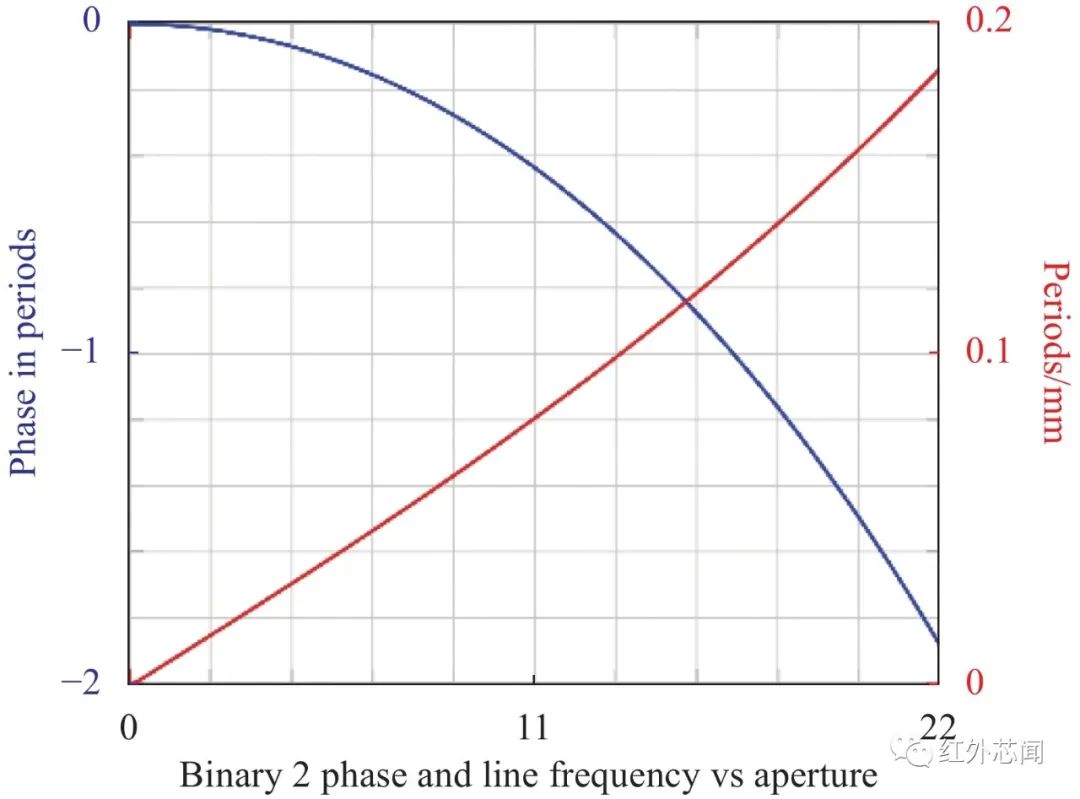
图13 二元面位相、周期与元件直径的关系
在8.0~12.0 μm工作波段范围内,取中心波长9.6 μm,利用衍射效率计算公式得到波段平均衍射效率为95.5%,元件衍射效率如图14所示。考虑光学零件加工引起的遮挡效应及表面粗糙度造成光束散射等因素,使用波段平均衍射效率约为92.0%。因此,光学系统透过率为:τ=0.96×0.975×0.92×0.975=0.84。满足系统光学透过率要求。
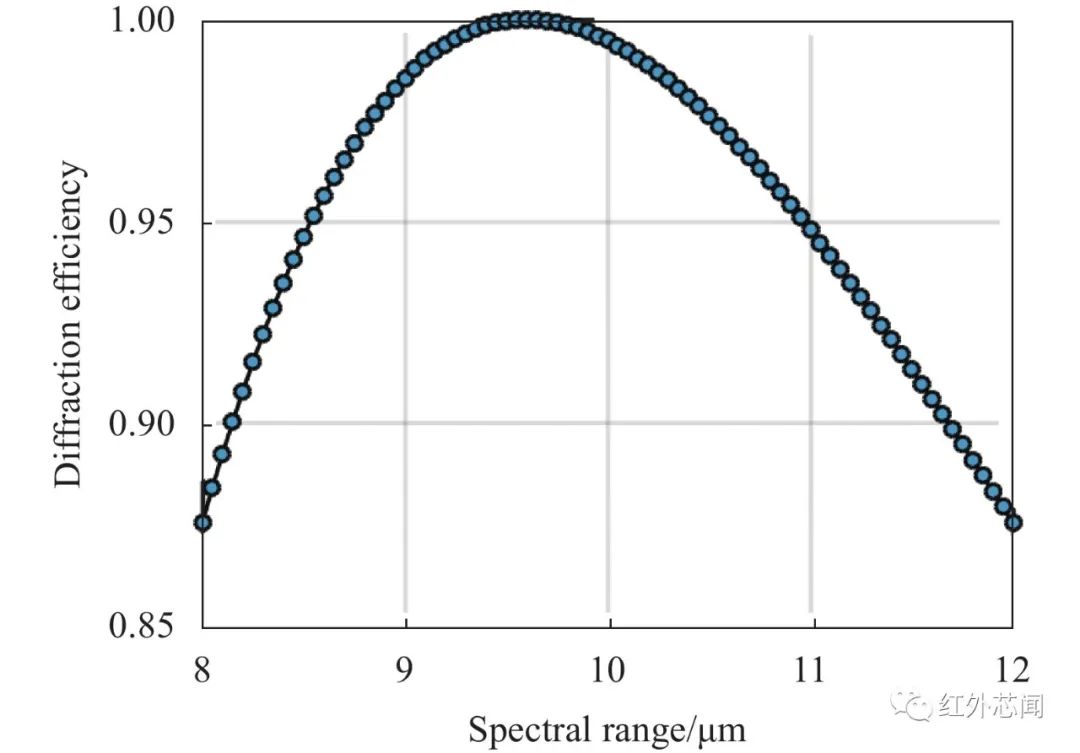
图14 二元衍射面衍射效率
系统凸轮曲线重整化
系统设计的最后阶段还需要计算变倍组、补偿组及第二补偿组随焦距变化的位移量。优化设计过程中只给出变焦系统五重结构,包含了系统变焦区间(长焦、短焦)及中间三个焦距位置,实际凸轮结构设计需要覆盖整个变焦区间,需要完整的变焦曲线,即以变焦间隔为自变量,以系统焦距为函数的曲线方程,或充分稠密的数据表,该项操作称为变焦曲线的“重整化”。
与两个运动组元的正组补偿或负组补偿系统中变倍组与补偿组位置关系一一对应不同,三组联动变焦系统的每一个变倍组位置存在多个补偿解,因此三组联动变焦系统曲线重整需考虑凸轮曲线平滑及单调性。将系统的曲率半径及非球面参数设置为定值,将变焦间隔设为变量,从短焦到长焦插入多重结构按一定的间隔赋值,一般变倍比小于10时,200个焦距位置数据对凸轮结构设计已足够,编制ZPL宏程序自动设置操作数,改变焦距值逐次优化并控制相邻焦距变倍组及补偿组的相对移动量,得到整个变焦区间的变焦间隔及评价函数收敛情况。系统凸轮曲线如图15所示。从图中可知变倍组最大行程为56 mm,补偿组最大行程为17.5 mm,第二补偿组最大行程为4.5 mm;变倍组、补偿组曲线平滑无拐点采用凸轮轨道驱动,凸轮转角与变倍组与补偿组的压力升角关系如图16所示。第二补偿组采用单个电机驱动,有利于系统视距调焦及主动消热,考虑高低温消热补偿行程,该组最大移动量为6.6 mm。
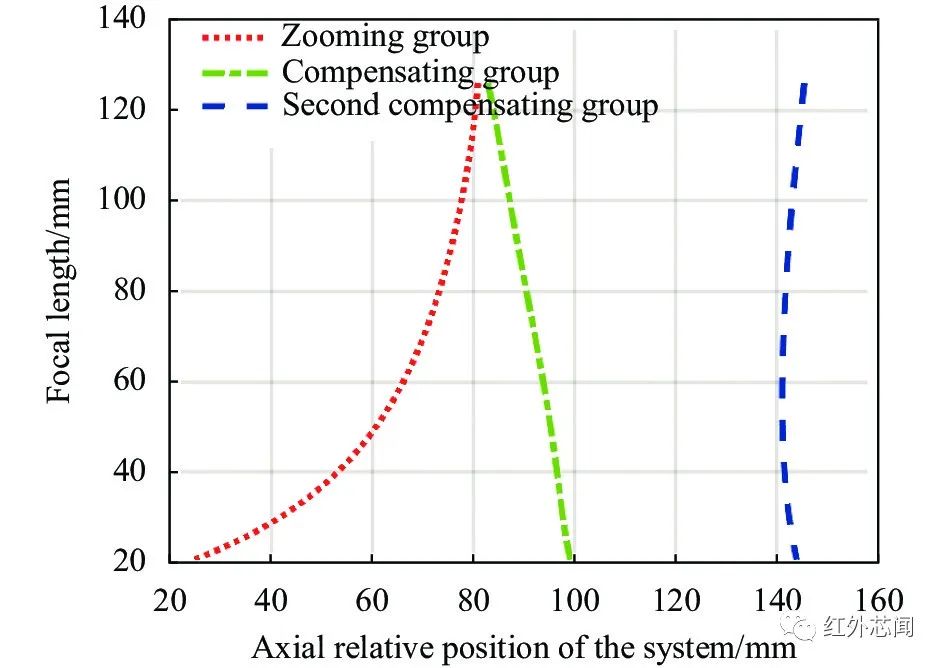
图15 连续变焦光学系统凸轮曲线
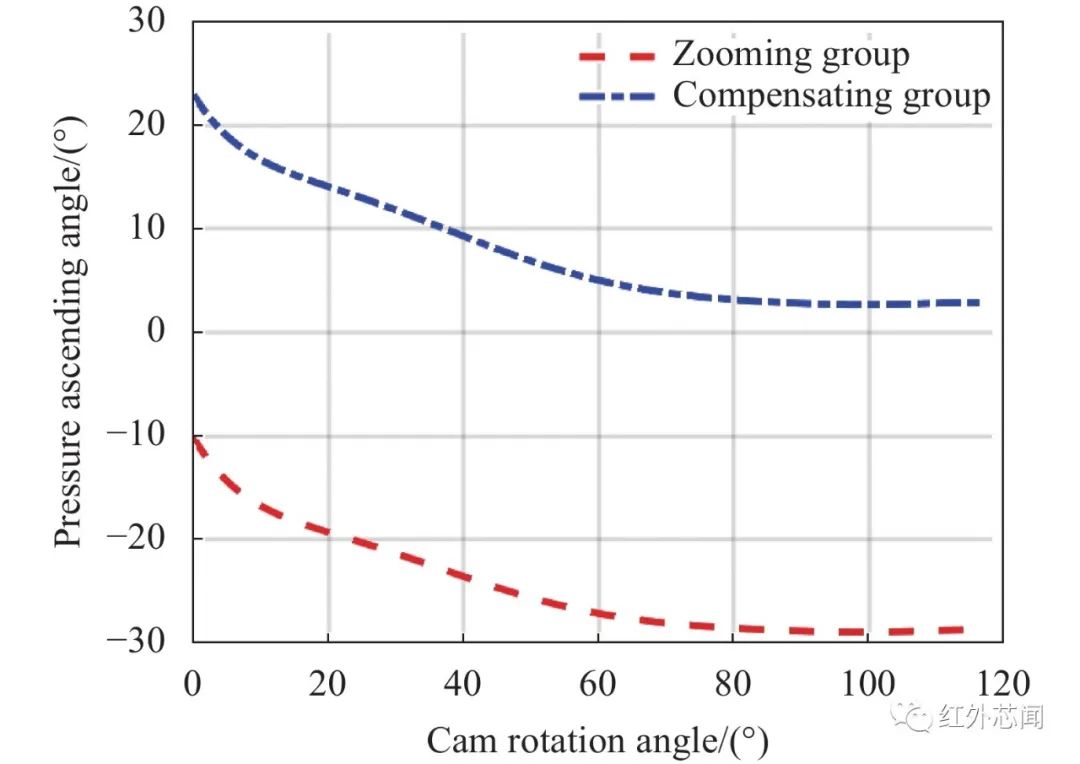
图16 凸轮转角与压力升角关系
结论
随着红外热像仪朝着SWaP-C方向快速迭代,影响非制冷连续变焦红外热像仪尺寸、体积、质量、价格等方面的变焦光学系统日益朝着总长短、体积小、成本低、性能高、环境适应性好等方面发展,以满足民用、军事等各方面的应用需求。基于640×512像元间距12 μm的非制冷焦平面探测器,采用变F#设计方法、引入三组联动变焦设计技术、通过主动补偿消热差,实现了一款四片透镜结构的紧凑低成本连续变焦光学系统设计。系统焦距变化范围为20.7~126 mm,相应F#在1.05~1.2之间变化,对应视场变化范围为21°×16.8°~3.5°×2.8°,变倍比为6.0×,最大物镜口径116 mm,光学总长180 mm,远摄比为1.44,光学零件总质量418 g,零件加工工艺成熟,加工装调容差较好,变焦凸轮曲线平滑,凸轮轨道易于加工,运动组元伺服控制简单,系统在−40~+60 ℃环境下成像清晰,满足高低温使用要求。该紧凑低成本非制冷长波红外连续变焦光学系统将在导航、侦察、警戒、搜索及跟踪等无人系统平台或手持热像仪产品中具有广阔的市场前景,推动非制冷红外热像仪进一步朝着降低SWaP-C方向发展。
审核编辑:刘清
-
OCAD应用:二组元连续变焦系统2026-04-21 193
-
OCAD应用:三组元连续变焦系统2026-04-20 186
-
OCAD应用:五组元连续变焦系统2026-04-16 173
-
OCAD应用:线性双组联动补偿式连续变焦系统2026-04-13 257
-
制冷型红外探测器如何选择?中波与长波的全面对比2025-11-11 1552
-
OCAD应用:四组元连续变焦系统2025-05-20 624
-
5v2a低成本非标电源管理芯片U6513BS2024-12-12 1630
-
制冷红外探测器材料?2023-09-01 2627
-
Teledyne推出紧凑型无快门版长波红外相机2023-06-09 2468
-
自由曲面冷光学红外探测终端成功应用2023-02-23 1839
-
低成本紧凑型偏置电源参考设计2022-09-07 773
-
一种用于封装长波QWIP-LED量子阱红外探测器的结构2020-08-30 5246
-
300米红外变焦激光灯2013-04-12 3100
-
光学变焦与数码变焦的区别2011-12-06 7623
全部0条评论

快来发表一下你的评论吧 !
