

 非接触式赛车遥控拆解:“油门”、转向线性控制,操控体验满分
非接触式赛车遥控拆解:“油门”、转向线性控制,操控体验满分
描述
电子发烧友网报道(文/李诚)在上一周的拆解文章中,笔者通过电路结构图与文字的方式,向大家讲解了,RC遥控车如何通过空心杯电机、差速器与2.4G跳频控制,实现车辆平跑漂移。今天这篇文章,将向大家讲解,RC遥控车的遥控器摇杆与主板,如何在无接触的情况下通信,并完成“油门”与转向的线性控制。
遥控器外观及内部结构
遥控器外观采用圆润的曲线设计,使得遥控器能够很好的被手心包裹,并且两侧较宽,可满足各种大小手型的握持需求。虽然,官方并没有说特别说明这款遥控器,是否采用了人体工学的设计,但是在握持手感上确实不错。





遥控器正面有两个只有前后、左右,单一的方向控制摇杆,以及电源开关键与车轮扭矩微调旋钮。背面是可容纳两颗7号电池的电池仓。

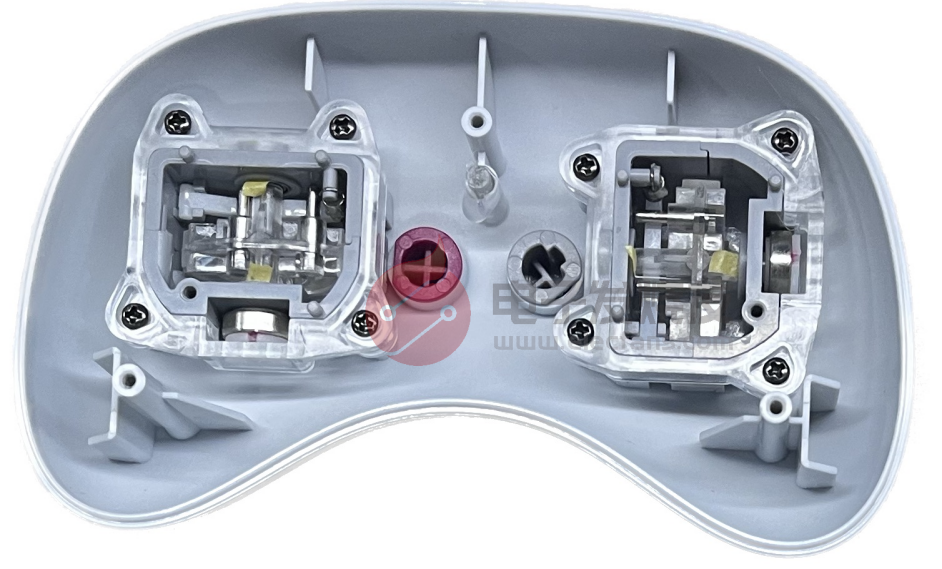
遥控器内部由摇杆和主板两部分组成。通过惊奇的拆解发现,遥控器用于控制方向的摇杆与主板,竟然是两个相互独立的个体,并且摇杆与主板之间并没有使用任何触点和导线,将他们二者连接在一起。整个遥控器中有且仅有的导线,是两根从电池仓引出为主板供电的电源线。那么遥控器摇杆的控制信号,究竟是如何在非接触的情况下传递到主板的呢?
磁悬浮霍尔传感技术,油门、转向线性控制的关键
据介绍,此款RC遥控车遥控器最大的亮点,在于磁悬浮霍尔传感技术非接触式控制技术,这项技术不仅可以避免器件之间物理接触带来的磨损,还可以通过改变摇杆倾斜率,完成油门、转向全比例控制,模拟真车线性加速的真实感。
在结构层面上,其实油门控制摇杆与转向摇杆是一模一样的,只不过由于控制方向的不同,他们的摆放位置也有所不同。

摇杆内部使用了一根连杆和弹簧进行支撑,侧面是一颗圆形的磁铁,当摇杆做前、后往复式机械运动时,侧边的磁铁也会同步转动。

(主板图片经过镜像处理)
经过测试发现,摇杆侧边磁铁和我们日常接触到的磁铁不同,该磁铁的磁力呈线性分布的状态,中间红点处没有磁力,向左右两边逐渐增强。
正是这颗磁力呈线性分布的磁铁与主板对应位置上的霍尔传感器,构建了一套非接触式磁悬浮霍尔传感控制系统。正因如此,霍尔传感器可以根据磁铁的磁场强度变化,在主板不接触摇杆的情况下完成通信,感知摇杆的倾斜角度。
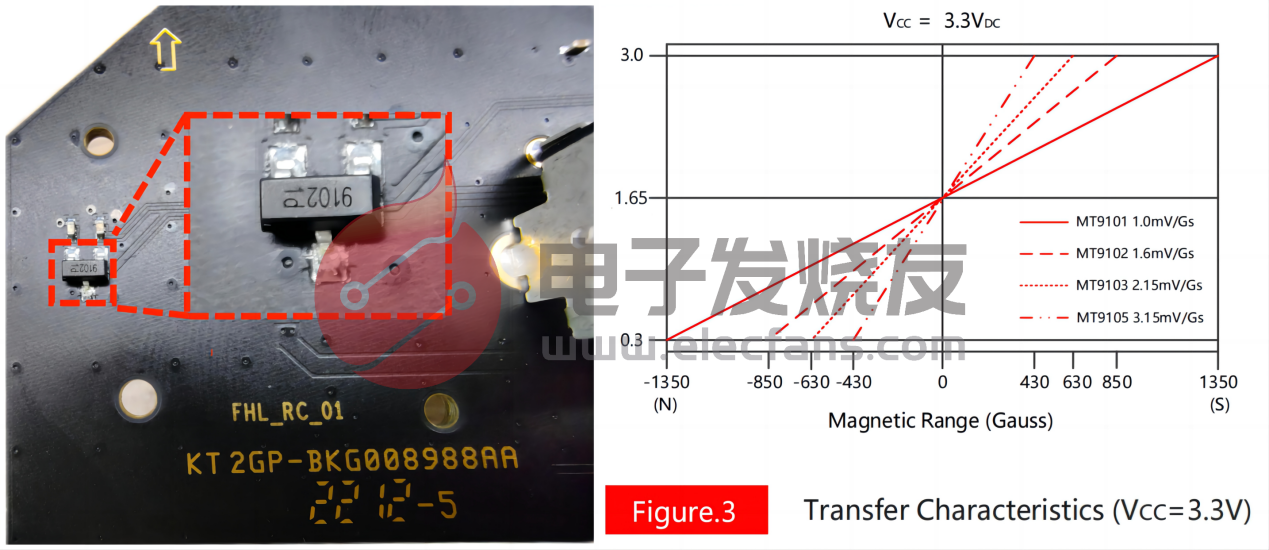
另外,遥控器里所使用的传感器,是来自麦歌恩的线性霍尔传感器MT9102,其受到磁场影响后,会输出线性电压。并且输出电压还与磁铁的磁极有关,从数据手册里的磁场传输特性图可以看出,当输出电压为1/2 Vcc时,就代表传感器没有感应到磁场,也意味着摇杆处于复位状态,磁铁上的红点居中。当推动摇杆,线性霍尔传感器侦测到摇杆上的磁极和磁场强度发生变化时,线性霍尔传感器的输出电压也会随之变化,主控芯片就可以根据霍尔传感器的输出电压变化,判断摇杆发出的指令,究竟是转向指令还是油门指令。同时,输出电压的线性变化,也为模拟真车油门、转向的线性控制,提供了有利的条件。
MCU与2.4G射频收发电路
由于遥控器功能单一,只有油门和转向两种功能,因此主板电路也并不复杂。除了油门、转向感应电路之外,就只有一个主控电路和2.4G射频收发电路。

主控电路所使用的芯片,是来自兆易创新的32位MCU GD32E230。该芯片在电路中主要用于读取线性霍尔传感器输出端的电压变化,将读取到的电压值与数据库里的参数进行比对,以此判断摇杆的实时控制指令。

经过MCU判断后的控制指令,最终会传递到MCU左侧的射频芯片,进行调制、输出。在该电路中所使用的射频芯片,是来自南京中科微的Si24R1,具有低功耗、开发难度低等特点, 只需要MCU通过 SPI 接口对芯片少数几个寄存器配置即可以实现数据的收发通信。并且,从遥控器的射频收发电路结构就能看出,该芯片的系统应用成本很低,只需要一个MCU和少量外围无源器件即可以组成一个无线数据收发系统。
总结
通过拆解得知,这款遥控器的系统结构,主要由磁场强度感应、识别判断指令、读取指令(调制信号)和发射信号四部分构成。
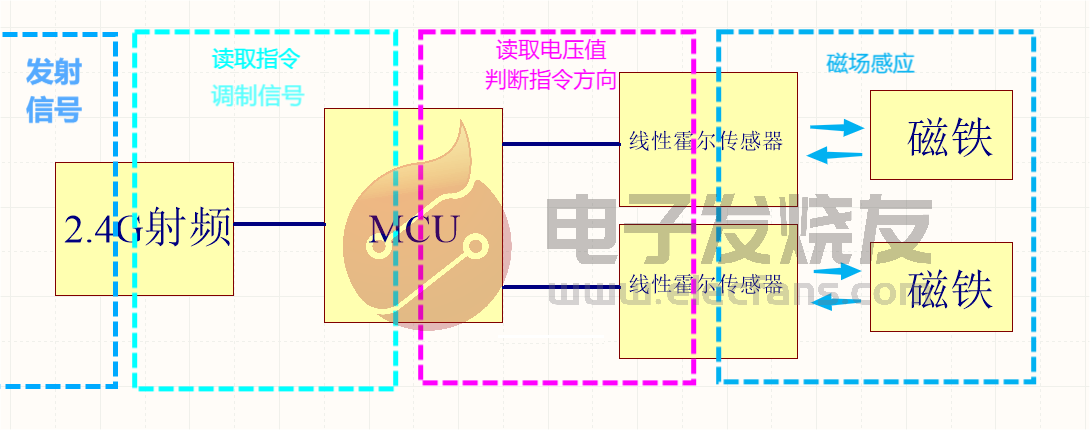
其中,非接触式磁悬浮霍尔控制系统由,2.4G射频收发芯片、控制MCU和两颗线性霍尔传感器与两颗磁铁构成。并且,每颗磁铁与线性霍尔传感器构成一组感应电路,每组电路分别与MCU一个引脚相连,各代表一种工作姿态(油门、转向)。
在使用摇杆控制遥控车时,线性霍尔传感器会实时感应磁铁磁极与磁场强度的变化,并根据磁场强度输出对应电压。当MCU接收到电信号时,首先会根据引脚判断工作姿态(油门、转向),再根据电压大小,向射频芯片输入相应的控制指令,最后经射频芯片调制后向遥控车发出。
在实际操控过程中,遥控车还可以根据霍尔传感器输出电压的线性变化模拟真车的油门与转向,摇杆推得越深,速度跑的越快,转向越大,车轮的转角也越大。
打开APP阅读更多精彩内容
遥控器外观及内部结构
遥控器外观采用圆润的曲线设计,使得遥控器能够很好的被手心包裹,并且两侧较宽,可满足各种大小手型的握持需求。虽然,官方并没有说特别说明这款遥控器,是否采用了人体工学的设计,但是在握持手感上确实不错。
遥控器正面有两个只有前后、左右,单一的方向控制摇杆,以及电源开关键与车轮扭矩微调旋钮。背面是可容纳两颗7号电池的电池仓。
遥控器内部由摇杆和主板两部分组成。通过惊奇的拆解发现,遥控器用于控制方向的摇杆与主板,竟然是两个相互独立的个体,并且摇杆与主板之间并没有使用任何触点和导线,将他们二者连接在一起。整个遥控器中有且仅有的导线,是两根从电池仓引出为主板供电的电源线。那么遥控器摇杆的控制信号,究竟是如何在非接触的情况下传递到主板的呢?
磁悬浮霍尔传感技术,油门、转向线性控制的关键
据介绍,此款RC遥控车遥控器最大的亮点,在于磁悬浮霍尔传感技术非接触式控制技术,这项技术不仅可以避免器件之间物理接触带来的磨损,还可以通过改变摇杆倾斜率,完成油门、转向全比例控制,模拟真车线性加速的真实感。
在结构层面上,其实油门控制摇杆与转向摇杆是一模一样的,只不过由于控制方向的不同,他们的摆放位置也有所不同。
摇杆内部使用了一根连杆和弹簧进行支撑,侧面是一颗圆形的磁铁,当摇杆做前、后往复式机械运动时,侧边的磁铁也会同步转动。
(主板图片经过镜像处理)
经过测试发现,摇杆侧边磁铁和我们日常接触到的磁铁不同,该磁铁的磁力呈线性分布的状态,中间红点处没有磁力,向左右两边逐渐增强。
正是这颗磁力呈线性分布的磁铁与主板对应位置上的霍尔传感器,构建了一套非接触式磁悬浮霍尔传感控制系统。正因如此,霍尔传感器可以根据磁铁的磁场强度变化,在主板不接触摇杆的情况下完成通信,感知摇杆的倾斜角度。
另外,遥控器里所使用的传感器,是来自麦歌恩的线性霍尔传感器MT9102,其受到磁场影响后,会输出线性电压。并且输出电压还与磁铁的磁极有关,从数据手册里的磁场传输特性图可以看出,当输出电压为1/2 Vcc时,就代表传感器没有感应到磁场,也意味着摇杆处于复位状态,磁铁上的红点居中。当推动摇杆,线性霍尔传感器侦测到摇杆上的磁极和磁场强度发生变化时,线性霍尔传感器的输出电压也会随之变化,主控芯片就可以根据霍尔传感器的输出电压变化,判断摇杆发出的指令,究竟是转向指令还是油门指令。同时,输出电压的线性变化,也为模拟真车油门、转向的线性控制,提供了有利的条件。
MCU与2.4G射频收发电路
由于遥控器功能单一,只有油门和转向两种功能,因此主板电路也并不复杂。除了油门、转向感应电路之外,就只有一个主控电路和2.4G射频收发电路。
主控电路所使用的芯片,是来自兆易创新的32位MCU GD32E230。该芯片在电路中主要用于读取线性霍尔传感器输出端的电压变化,将读取到的电压值与数据库里的参数进行比对,以此判断摇杆的实时控制指令。
经过MCU判断后的控制指令,最终会传递到MCU左侧的射频芯片,进行调制、输出。在该电路中所使用的射频芯片,是来自南京中科微的Si24R1,具有低功耗、开发难度低等特点, 只需要MCU通过 SPI 接口对芯片少数几个寄存器配置即可以实现数据的收发通信。并且,从遥控器的射频收发电路结构就能看出,该芯片的系统应用成本很低,只需要一个MCU和少量外围无源器件即可以组成一个无线数据收发系统。
总结
通过拆解得知,这款遥控器的系统结构,主要由磁场强度感应、识别判断指令、读取指令(调制信号)和发射信号四部分构成。
其中,非接触式磁悬浮霍尔控制系统由,2.4G射频收发芯片、控制MCU和两颗线性霍尔传感器与两颗磁铁构成。并且,每颗磁铁与线性霍尔传感器构成一组感应电路,每组电路分别与MCU一个引脚相连,各代表一种工作姿态(油门、转向)。
在使用摇杆控制遥控车时,线性霍尔传感器会实时感应磁铁磁极与磁场强度的变化,并根据磁场强度输出对应电压。当MCU接收到电信号时,首先会根据引脚判断工作姿态(油门、转向),再根据电压大小,向射频芯片输入相应的控制指令,最后经射频芯片调制后向遥控车发出。
在实际操控过程中,遥控车还可以根据霍尔传感器输出电压的线性变化模拟真车的油门与转向,摇杆推得越深,速度跑的越快,转向越大,车轮的转角也越大。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 产品拆解
-
请问行车电脑(ECU)是如何控制刹车制动、油门、以及转向的呢?2024-02-02 1033
-
非接触式精密测径仪的相关介绍2018-05-11 3519
-
非接触式高分辨率磁性线性编码器AS53112020-04-28 3348
-
非接触式IC卡技术2010-07-02 1154
-
非接触式IC卡节水控制器的设计与实现2009-11-23 2362
-
非接触式IC卡,非接触式IC卡是什么意思2010-04-02 15750
-
磁阻式角度传感器在电子油门系统的应用2011-09-27 1919
-
隔空控制遥控玩具赛车2018-06-18 2614
-
非接触式ic卡与接触式区别2019-08-02 26487
-
磁阻式非接触角度传感器的介绍和在电子油门系统的应用说明2019-11-05 1541
-
非接触式测温仪原理_非接触式测温仪应用2020-02-27 6806
-
基于非接触式角度传感器实现汽车油门踏板角度测量系统的设计2021-04-12 4315
-
Aigtek功率放大器在超疏水表面非接触式操控液滴研究中的应用2024-11-07 1066
-
宽带放大器在超疏水表面非接触式操控液滴及表面增强拉曼散射高通量测量中的应用2026-01-22 5565
-
微型遥控赛车开源项目介绍2026-04-22 449
全部0条评论

快来发表一下你的评论吧 !
