

零漂移放大器:取好与坏
描述
零漂移放大器:将好的(精度)与坏的(时域性能)结合起来 零漂移放大器,即实现连续自校正架构的放大器,由于其能够实现高水平的直流精度而受到广泛欢迎。虽然这种关注是当之无愧的,但这种卓越的精度有一个缺点,即放大器的时域性能。
零漂移放大器的基本架构在深入研究这些零漂移放大器的时域方面之前,回顾一下其中许多器件中使用的基本架构是有益的。图1提供了斩波稳定架构的高级视图,例如Microchip的许多MCP6Vxx零漂移放大器上使用的架构。
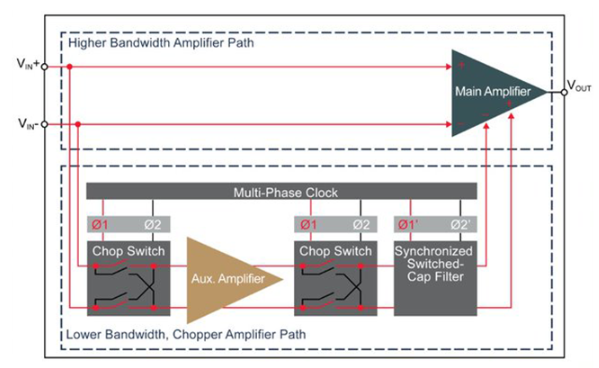
图1.斩波器稳定架构。
斩波稳定放大器有两个信号路径,一个始终连接到主放大器的高带宽路径和一个较低带宽的辅助路径。主放大器专为高带宽而设计,并决定整个放大器的指定增益带宽乘积和压摆率。输入信号也通过辅助路径路由,辅助路径在输入和输出端都有斩波开关,然后是滤波器级,然后再添加回主放大器路径。该次级路径中的辅助放大器具有极高的增益,使其能够校正从毫伏到微伏的失调。
架构如何影响时域性能 现在我们已经对这种架构有了基本的了解,让我们探讨一下它如何影响放大器的时域性能。我们首先考虑放大器输入端的大规模阶跃响应,如图2所示。
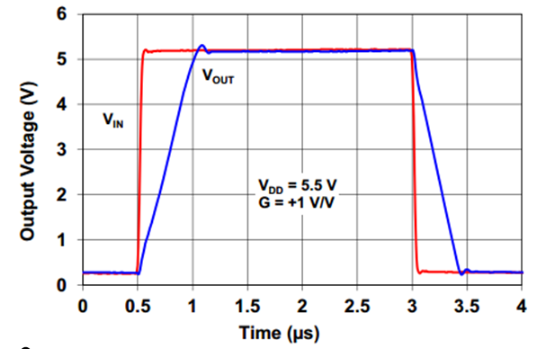
图2.大规模阶跃响应。
在本例中,输入电压(以红色显示)几乎立即从大约200 mV步进至5.2V。单位增益放大器的输出电压(以蓝色显示)试图匹配此阶跃响应,但压摆受限,输出需要额外的时间才能稳定到其最终值。对于自我纠正架构来说,这是一个特别困难的情况。如前所述,零漂移放大器内的高带宽信号路径负责整体速度(增益带宽和压摆率)。但是,一旦达到阶跃响应的新值,输出必须稳定在零漂移放大器的失调下限值(通常小于50 μV)内。这涉及带宽受限的辅助路径,因此很大程度上是斩波频率的函数。使用更高的时钟频率可以实现相对较快的建立时间,但对于零漂移放大器,这些时间通常在几十微秒或更高。然而,较高的斩波频率会导致最终校正失调电压的增加,这通常是精密设计的首选。
零漂移放大器的另一个时域方面是启动行为。当放大器第一次上电时,有一小段时间,放大器的输出ifier将反映主放大器的未校正失调误差(如上图所示)。一旦电源电压达到跳变点(由放大器上电复位电路定义),辅助校正路径需要几个时钟周期,然后主放大器的输出才能回到指定的失调电平内。通常,此启动时间完全在放大器工作的整个系统的启动时间内,因此不是问题。但是,如果放大器配置为高闭环增益,则放大器输出端的瞬时未校正失调(可能高达±5 mV)可能导致放大器供电轨。在这种情况下,启动时间还需要包括放大器返回其线性工作区域所需的时间。对于Microchip零漂移放大器,数据手册中提供了该过驱恢复时间的典型值。
了解放大器架构如何影响时域性能有助于避免设计陷阱
现代零漂移设计一直在努力使这些时域权衡尽可能小,但系统设计人员仍然值得意识到这些潜在问题。延长的启动时间和过驱恢复会影响系统内其他与时序相关的功能,例如模数转换器对信号进行采样的适当时间。通过了解这些潜在问题以及它们与这种独特架构的关系,设计人员可以在初始设计中弥补这些问题,而不是在设计完成后跟踪与时序相关的问题。
审核编辑:郭婷
-
什么是零漂移放大器?它有哪些特性?2024-08-08 1845
-
零漂移放大器的缺点和优点有哪些?2023-09-19 1597
-
零漂移放大器的特性和优势2022-11-11 781
-
零漂移放大器:特性和优势2022-11-01 692
-
零漂移放大器的选择2021-09-22 2433
-
可用于高精度电路的零漂移放大器2021-04-06 1831
-
零漂移放大器的性能分析2019-08-26 2976
-
零漂移放大器特性概述2019-08-20 1656
-
零漂移放大器有哪些常见应用?2019-07-16 5853
-
零漂移放大器2017-03-05 896
-
零漂移放大器基础知识2011-10-08 2928
-
零漂移放大器原理及应用2010-10-29 2159
-
零漂移反相放大器电路2009-12-07 1769
-
零漂移运算放大器2009-03-20 823
全部0条评论

快来发表一下你的评论吧 !
