

工业机器人的伺服电机结构解析
电子说
描述
德系的工业机器人系统中,对于机器人停止运动,定义了3种模式,比如 的 KUKA工业机器人分别定义了 Stop 0 ,Stop 1,Stop 2 。
这种定义模式是与机器人的机械结构和电气结构相关联的。
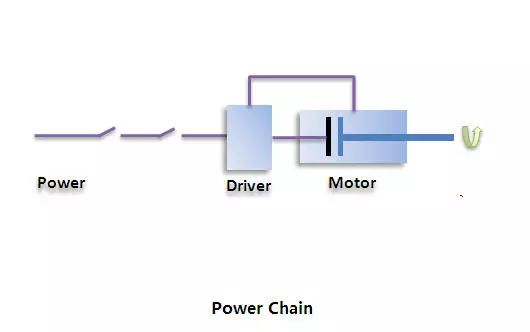
图一
对于此,读者应该先了解工业机器人上伺服电机的结构,以及伺服电机驱动器(放大器)的供电模式。
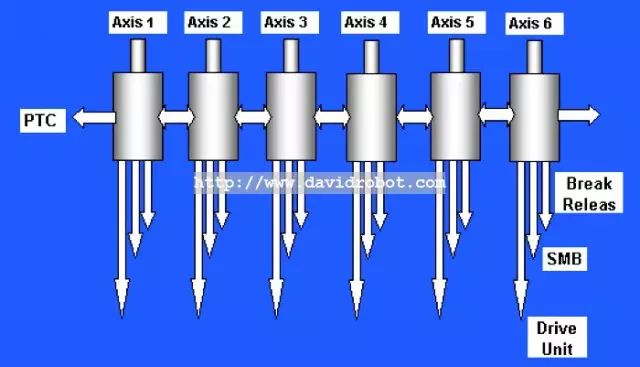
ABB Robot 电机链接机构
ABB机器人本体(机械臂)需要六个自由度,所提供的动力来自于6个三相交流伺服电机(Servo Motor),每个交流电机除了三组线圈绕组导线外,还有其他部件的引出线:一组接PTC,一组接刹车(Brake),还有编码器(Resolver)有三组导线。6个电机的刹车电路并联成一路,PTC温度检测6个是串联成一路。6个编码器的电路与SMB相连。六个电机动力绕组由驱动单元(Drive Unit)供电。
机器人不工作时,六个电机的刹车电路不通电,电机依靠刹车片摩擦固定,经过减速器后,整个机械机构死锁。工作时,电机通电,刹车电路通电,刹车片松开,电机依靠磁场固定。某个电机温度异常时,PTC总阻值变大,控制器报警停止工作。
图二
机器人的摩擦制动主要靠伺服电机里面的刹车 (Brake) 机构。一旦刹车释放,伺服电机轴的转动就会受到阻力。(如图一,黑色部分代表刹车,蓝色部分为电机转子,工作时两者分离,摩擦制动时两者贴合摩擦。)
而对于伺服电机驱动器的供电模式,工业机器人电气系统的典型结构是串联两个接触器,而这两个接触器的吸合放开控制,由机器人的安全电路模块来控制。
再看如何使运动的机器人停止运动,
方法1、 通过驱动器,使电机减速;
方法2、直接切断驱动器供电,释放电机刹车,靠刹车片摩擦来制动。
(是不是有点类似汽车驾驶的制动,一种可以用发动机来制动,一种可以打开离合,用脚刹来制动。)
所以两种制动方法结合起来,就组成了机器人的运动停止模式。
Stop 0 直接切断驱动器供电,同时释放刹车。
Stop 1 先驱动器控制减速制动,然后再切断驱动器供电,同时释放刹车。(KUKA是1秒后切断电源 *注2)
Stop 2 只通过驱动器减速制动,不切断驱动器供电,不释放刹车。
考虑一下,对于机器人运动轨迹的影响?
答案显而易见的,Stop 0 的停止模式,运动是不受控的,所以机器人停止时,TCP 可能偏移了路径;而Stop 1 和 Stop 2 的模式,运动是受驱动器减速控制的,机器人停止时,TCP 会停在路径上。
为什么要介绍这个呢?因为在工业设备使用过程中,安全是个很重要的话题,了解了工业机器人的运动停止模式,那么我们就可以更好的规划现场布局和编制工业机器人程序。
再回到机器人系统上,如果我们给机器人发出了停止信号,机器人并不是能立即瞬间停止运动。设想一下汽车驾驶员所做的一个刹车过程,我们考虑最极端的情形,当一辆高速行驶的汽车突然发现前面车辆突然停车,而且自身也没其他道路可走,驾驶员所能做的就是努力踩下刹车并祈祷赶快停止(这里我们不考虑赛车手做180度转弯的情况 XD ),不然就与前车追尾了。从眼睛观察到前车异常并传送给大脑然后大脑下达大脚踩下刹车这一过程,属于人这个控制系统自身的反应时间,在这段时间里,汽车仍然在全速前进。踩下刹车后,刹车片就参与制动直至运动停止,这一段汽车前进的距离就是刹车距离。
对于机器人系统,要停下来,同样要考虑这两个过程。
一是从控制系统接收到停止信号并处理到切断电源或即将执行电机制动这段过程,总线、处理器等模块会造成时间延迟,机器人仍然会运动并通过一段距离。
二是电机刹车(Brake)释放后,电机刹车片摩擦制动,机器人要走过一段刹车距离。或者依靠电机本身减速制动同样需要走过一段距离。
在设计系统时,这个停止距离是必须要考虑的因素。汽车行驶要保持安全距离谨防追尾事故,机器人现场系统同样也是如此。
编辑:黄飞
-
工业机器人对伺服电机有什么要求2021-08-27 3709
-
工业机器人组成结构相关资料分享2021-07-05 2563
-
小白学机器人伺服电机模块相关资料分享2021-06-28 1324
-
机器人伺服电机如何选型?2021-06-09 1815
-
工业机器人的技术原理2018-11-23 4907
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4280
-
拆开工业机器人,让你见识机器人驱动系统中的电机种类2018-10-30 6810
-
工业机器人结构、驱动及技术指标详解2018-10-12 2475
-
工业机器人按驱动方式可分为哪些?2017-12-01 17115
-
工业机器人的产业链2017-08-23 4459
-
工业机器人所用的电机驱动系统2015-01-23 7439
-
工业机器人的基本结构2015-01-19 9243
-
变结构智能服务机器人2013-10-31 3168
全部0条评论

快来发表一下你的评论吧 !
