

串口通讯(Serial Communication) 简介3
电子说
描述
USART文件夹介绍
usart 文件夹内包含了 usart.c 和 usart.h 两个文件。这两个文件用于串口的初始化和中断接收。这里只是针对串口 1,比如你要用串口 2 或者其他的串口,只要对代码稍作修改就可以了。
usart.c里面包含了2个函数一个是void USART1_IRQHandler(void);另外一个是void uart_init(u32 bound);里面还有一段对串口 printf 的支持代码,如果去掉,则会导致 printf 无法使用,虽然软件编译不会报错,但是硬件上 STM32 是无法启动的,这段代码不要去修改。
printf 函数
这段引入 printf 函数支持的代码在 usart.h 头文件的最上方,这段代码加入之后便可以通过 printf 函数向串口发送我们需要的内容,方便开发过程中查看代码执行情况以及一些变量值。这 段代码不需要修改,引入到 usart.h 即可。
这段代码为:
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
uart_init函数
串口设置的一般步骤可以总结为如下几个步骤:
- 串口时钟使能,GPIO 时钟使能
2. 串口复位
2. GPIO 端口模式设置
2. 串口参数初始化
2. 开启中断并且初始化 NVIC(如果需要开启中断才需要这个步骤)
2. 使能串口
2. 编写中断处理函数
下面,我们就简单介绍下这几个与串口基本配置直接相关的几个固件库函数。
这些函数和定义主要分布在 stm32f10x_usart.h 和 stm32f10x_usart.c 文件中。
1.串口时钟使能。
串口是挂载在 APB2 下面的外设,所以使能函数为:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);
2.串口复位。
当外设出现异常的时候可以通过复位设置,实现该外设的复位,然后重新配置这个外设达到让其重新工作的目的。一般在系统刚开始配置外设的时候,都会先执行复位该外设的操作。
复位的是在函数 USART_DeInit()中完成:
void USART_DeInit(USART_TypeDef* USARTx);//串口复位
比如我们要复位串口 1,方法为:
USART_DeInit(USART1); //复位串口 1
3.串口参数初始化。
串口初始化是通过 USART_Init()函数实现的:
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
这个函数的第一个入口参数是指定初始化的串口标号,这里选择 USART1。
第二个入口参数是一个 USART_InitTypeDef 类型的结构体指针,这个结构体指针的成员变量用来设置串口的一些参数。一般的实现格式为:
USART_InitStructure.USART_BaudRate = bound; //波特率设置;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为 8 位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
从上面的初始化格式可以看出初始化需要设置的参数为:波特率,字长,停止位,奇偶校验位,硬件数据流控制,模式(收,发)。我们可以根据需要设置这些参数。
4.数据发送与接收。
STM32 的发送与接收是通过数据寄存器 USART_DR 来实现的,这是一个双寄存器,包含了 TDR 和 RDR。当向该寄存器写数据的时候,串口就会自动发送,当收到数据的时候,也是存在该寄存器内。
STM32 库函数操作 USART_DR 寄存器发送数据的函数是:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
通过该函数向串口寄存器 USART_DR 写入一个数据。
STM32 库函数操作 USART_DR 寄存器读取串口接收到的数据的函数是:
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
通过该函数可以读取串口接受到的数据。
5.串口状态。
串口的状态可以通过状态寄存器 USART_SR 读取。USART_SR 的各位描述如下图所示。
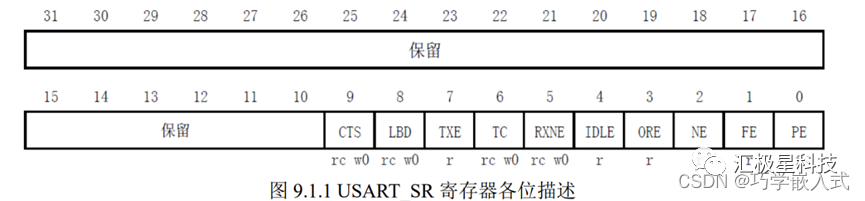
RXNE(读数据寄存器非空),当该位被置 1 的时候,就是提示已经有数据被接收到了,并且可以读出来了。这时候我们要做的就是尽快去读取 USART_DR,通过读 USART_DR 可以将该位清零,也可以向该位写 0,直接清除。
TC(发送完成),当该位被置位的时候,表示 USART_DR 内的数据已经被发送完成了。如果设置了这个位的中断,则会产生中断。该位也有两种清零方式:
1)读 USART_SR,写USART_DR。
2)直接向该位写 0。
在我们固件库函数里面,读取串口状态的函数是:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
这个函数的第二个入口参数非常关键,它是标示我们要查看串口的哪种状态,比如上面讲解的RXNE(读数据寄存器非空)以及 TC(发送完成)。例如:
我们要判断读寄存器是否非空(RXNE),操作库函数的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_RXNE);
我们要判断发送是否完成(TC),操作库函数的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_TC);
这些标识号在 MDK 里面是通过宏定义定义的:
#define USART_IT_PE ((uint16_t)0x0028)
#define USART_IT_TXE ((uint16_t)0x0727)
#define USART_IT_TC ((uint16_t)0x0626)
#define USART_IT_RXNE ((uint16_t)0x0525)
#define USART_IT_IDLE ((uint16_t)0x0424)
#define USART_IT_LBD ((uint16_t)0x0846)
#define USART_IT_CTS ((uint16_t)0x096A)
#define USART_IT_ERR ((uint16_t)0x0060)
#define USART_IT_ORE ((uint16_t)0x0360)
#define USART_IT_NE ((uint16_t)0x0260)
#define USART_IT_FE ((uint16_t)0x0160)
6.串口使能。
串口使能是通过函数 USART_Cmd()来实现的,这个很容易理解,使用方法是:
USART_Cmd(USART1, ENABLE); //使能串口
7.开启串口响应中断。
有些时候当我们还需要开启串口中断,那么我们还需要使能串口中断,使能串口中断的函数是:
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState)
这个函数的第二个入口参数是标示使能串口的类型,也就是使能哪种中断,因为串口的中断类型有很多种。比如在接收到数据的时候(RXNE 读数据寄存器非空),我们要产生中断,那么我们开启中断的方法是:
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断,接收到数据中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断,接收到数据中断
USART_ITConfig(USART1,USART_IT_TC,ENABLE);
8.获取相应中断状态。
当我们使能了某个中断的时候,当该中断发生了,就会设置状态寄存器中的某个标志位。经常我们在中断处理函数中,要判断该中断是哪种中断,使用的函数是:
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT)
比如我们使能了串口发送完成中断,那么当中断发生了, 我们便可以在中断处理函数中调用这个函数来判断到底是否是串口发送完成中断,方法是:
USART_GetITStatus(USART1, USART_IT_TC)
返回值是 SET,说明是串口发送完成中断发生。
串口实验设计
硬件设计
本实验需要用到的硬件资源有:
1) 串口 1
串口 1 之前还没有介绍过,本实验用到的串口 1 与 USB 串口并没有在 PCB 上连接在一起,需要通过跳线帽来连接一下。这里我们把 P6 的 RXD 和 TXD 用跳线帽与 PA9 和 PA10 连接起来。
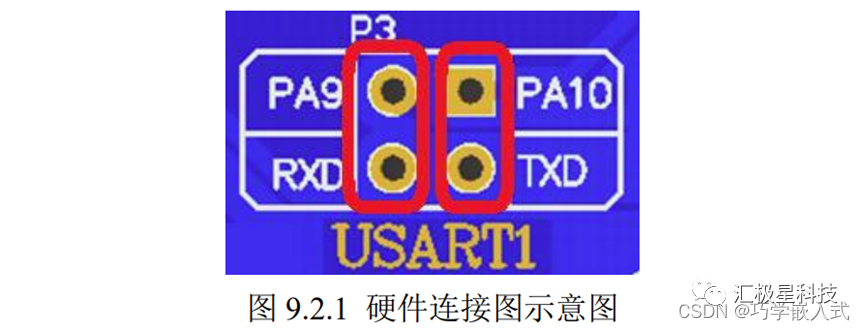
连接上这里之后,我们在硬件上就设置完成了,可以开始软件设计了。
-
串口通讯(Serial Communication) 简介12023-04-23 8613
-
串口通讯协议与RS-232标准简介2022-02-15 1114
-
串口通信Serial简介2022-01-11 812
-
STM32的串口通讯协议2021-12-24 808
-
Crazyflie 2.0学习周报16-3: 串口通讯详解及LPS node的USB通信2021-12-20 394
-
串口通讯基本知识简介2021-12-08 1273
-
串口通讯简介2021-11-30 1173
-
串口通讯协议简介2021-08-12 1204
-
串口通讯是什么2021-08-05 934
-
Proteus在MCS&ARM中的应用之Serial_Communication2016-01-20 429
-
什么是串口通讯/同轴电缆2010-03-26 3230
-
Serial Communication (COM) Dev2009-11-04 636
全部0条评论

快来发表一下你的评论吧 !
