

气伺服焊钳的力超时故障分析
工业控制
描述
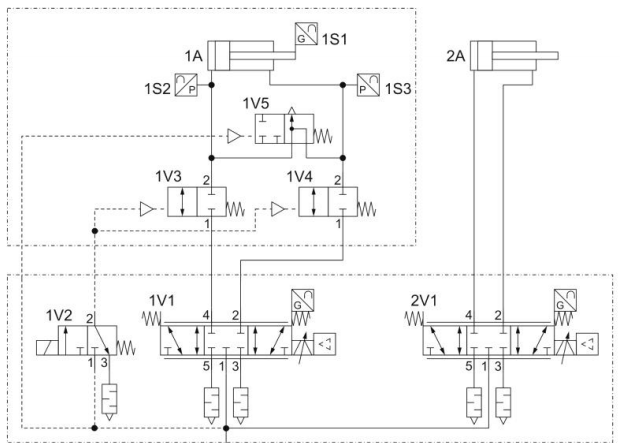
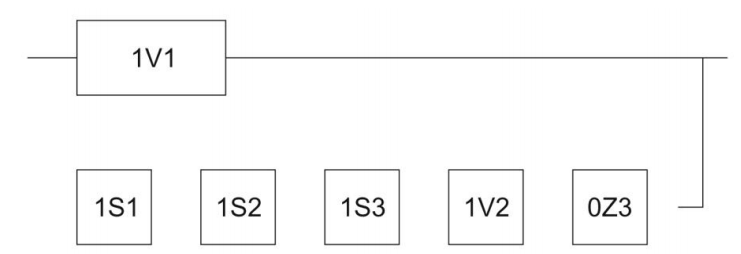
焊钳气动回路图.
安全功能保护装置免于启动,负载电压US2断开
US2关闭时安全功能停止的结构
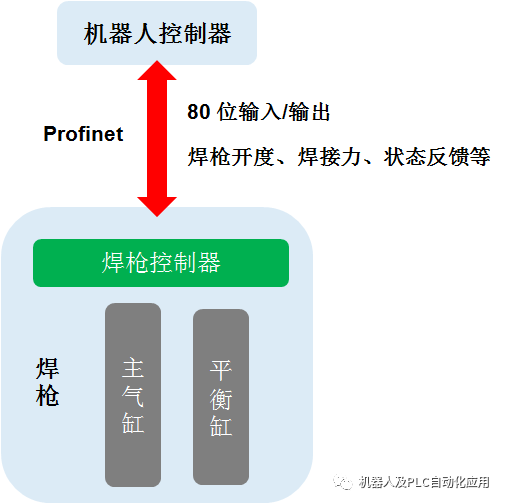
在不关闭US2的情况下安全功能停止的结构 1.公称压力 ,5 ... 10 bar. 2.最高 运营压力, 12 bar. 3.允许的超压(t = 1秒,无损坏), 16 bar max. 1 sec. 4.控制器主进气口1的工作介质, 干燥空气,未润滑,压力露点比中温低至少10 K. 5.工作电压–负载电源–逻辑电源24 V ±10 % ,24 V ±10 %. 6.工作电流(负载和逻辑电源).<4 A,仅当现场总线节点上未连接其他模块和阀时. 7.最高 数字量输出的允许负载电流, 250 mA. 8.环境温度,0 ... +50 °C. 9.贮存温度, -10 ... +60 °C. 10.中温, 5 ... +40 °C. 11.最高 允许相对湿度,无凝结, 90 % 12.防护等级, IP 65. 13.电磁兼容–辐射干扰–抗干扰. 14.抗冲击, 抗振性-----严重等级1. 1)必须在伺服箱的主压缩空气连接的前面安装一个5 µm的过滤器(0Z1)。 2)所有连接必须使用适当的保护盖密封。未使用的ProfiNet连接必须使用适当的插头密封。 3)该组件旨在用于工业环境。 加载基本参数集 基本参数包括优化的参数 –位置控制 –力控制 –7.轴操作 –合适的气缸类型 –电极帽参数 1.打开新项目 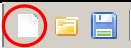 将打开包含标准参数文件的文件夹(..DefaultParameter) 2.选择参数文件xxx.spz
将打开包含标准参数文件的文件夹(..DefaultParameter) 2.选择参数文件xxx.spz
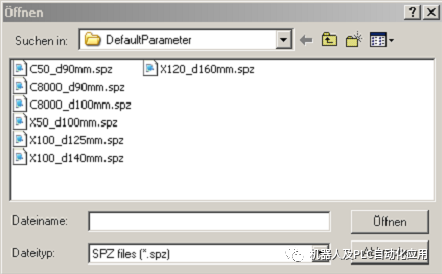
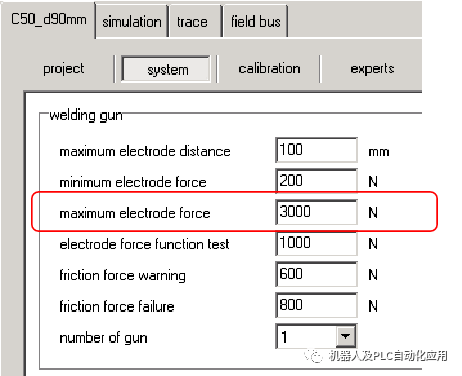
应为所有类型的焊枪存储标准参数集。例如: 如果使用直径为140mm的X100喷枪型号,请使用参数文件“X100_d140m.spz”。 3设置最大电极力 从喷枪的数据表或铭牌上插入最大电极力
4将数据加载到控制器中

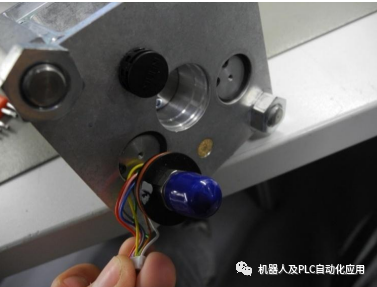
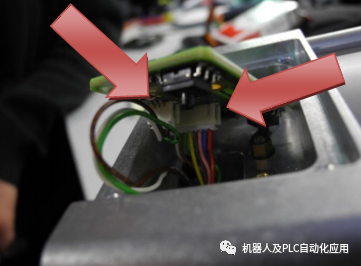
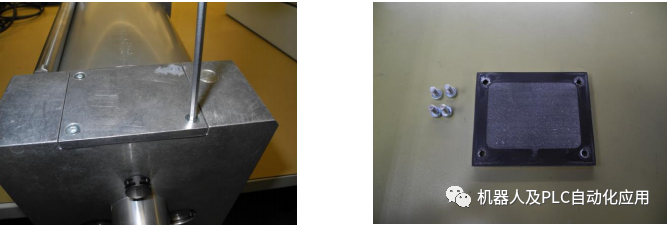
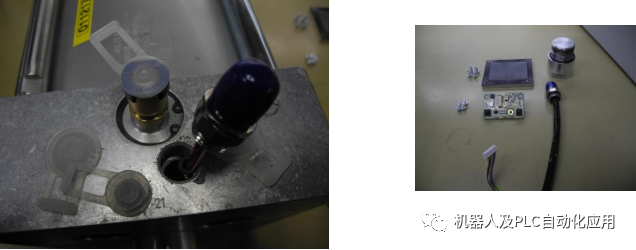
更换“90”气缸位移传感器说明 第1步: 将电路部分的密封盖板上的4个螺丝旋开取下。
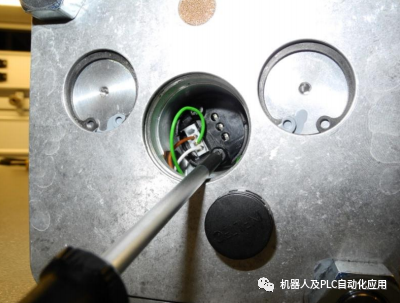
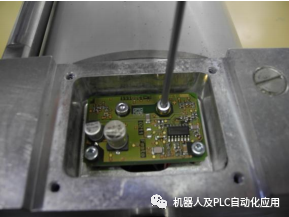
第2步: 将固定电路板的4个螺丝旋开取下
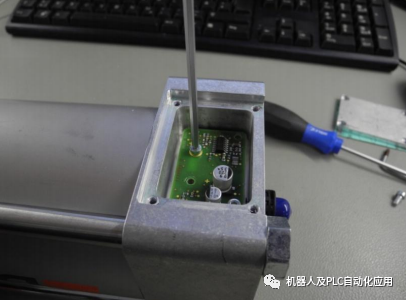
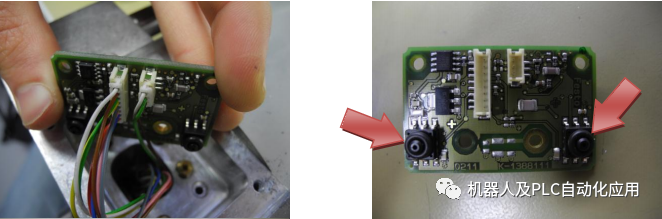
第3步: 取下电路板 - 取下电线插头 - 注意保持
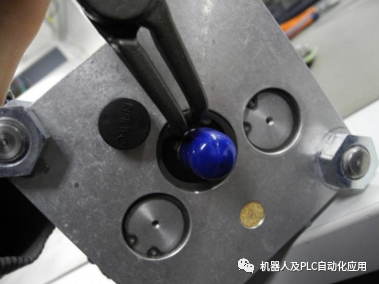
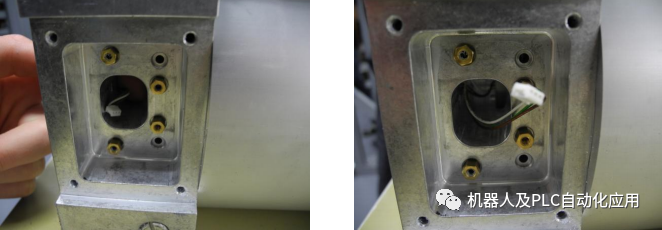
压力传感器的两个O型密封圈的清洁! 第4步: 取下气缸底部的卡簧。
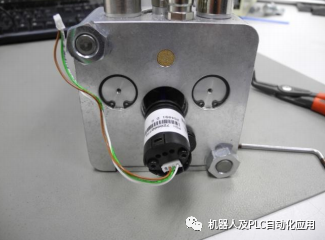
第5步: 取出电缆插座
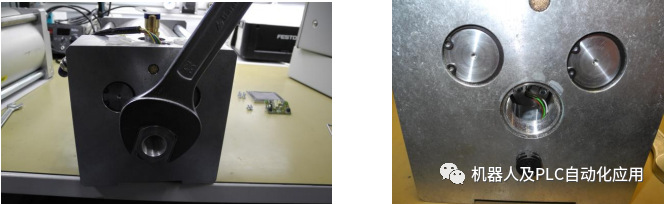
第6步 取下固定位位移传感器的两个螺丝。
第7步: 小心拉动电缆,将传感器一起带出来。

第8步: 将新的位移传感器装入气缸 - 注意对准螺丝孔 - 使用Loctite螺纹胶 - 螺丝拧紧力为0.7 Nm

第9步: 通过内部的电缆导向将传感器的电缆从顶部伸出。
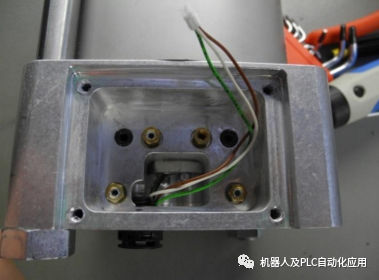
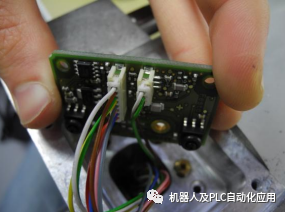
第10步: 将插座装入气缸(不要安装卡簧),然后将电缆的插头插入到电路板上。 如果有需要的话可以使用镊子。

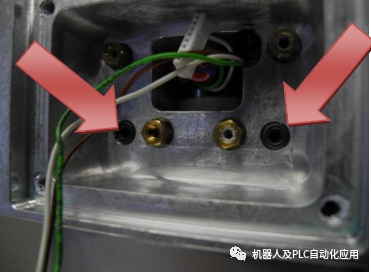
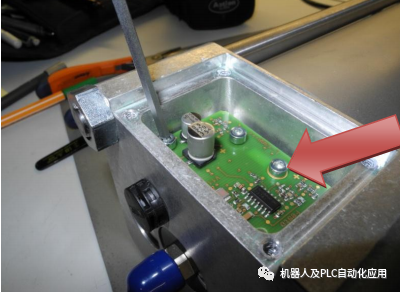
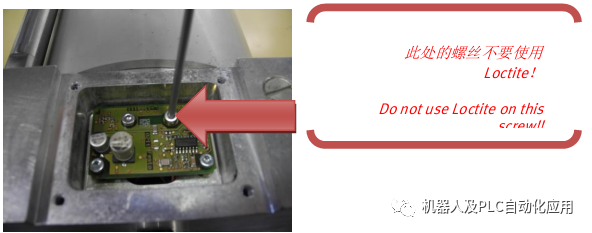
第11步: 固定电路板 注意: - 不要夹住电缆! - 密封圈放置的位置正确 在螺丝上使用Loctite 243紧固胶,图中箭头所指的螺丝不要使用螺纹胶。 螺丝紧固力为0.7 Nm
第12步: 将电路板的盖板盖上 注意密封纸的位置
第13步: 在螺丝上使用Loctite 243 螺丝紧固力为2 Nm
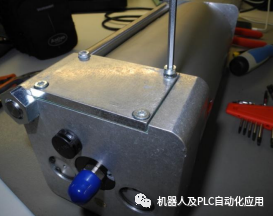
第14步: 装入卡簧

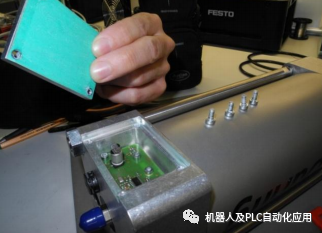
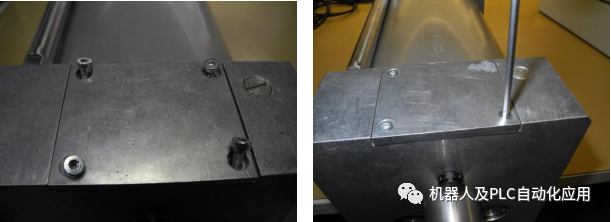
第15步: 在气缸上面贴上DOM标签,以标识更换过新的传感器。 更换“100/125/140/160”气缸位移传感器说明 第1步: 使用3.0内六角扳手将盖板上的四个螺丝松开取下。取下盖板
第2步: 松开4个螺丝,取下电路板。此处使用2.5内六角扳手。 取下电路板
第3步: 取下电路板上的两个插头。 注意! 注意不要让压力传感器的密封圈掉落。注意检查密封圈的位置是否正确。
第4步: 使用扳手将端盖上面的密封连接件拧下。
第5步: 使用扳手将电缆插座拧开并小心取下。
第6步: 松开固定位移传感器的两个内六角螺丝,拉动电缆带出位移传感器。

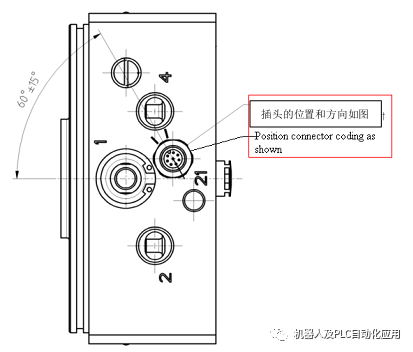
第7步: 将插头插入新的位移传感器,注意检查插头的方向是否正确。

第8步: 将新的位移传感器放入气缸,注意对齐安装螺丝孔的位置,以便固定传感器。 第9步: 将新的传感器放入气缸直至底部。 - 注意安装螺丝孔的位置 - 使用Loctite胶紧固螺丝 - 螺丝紧固力为0.7 Nm

第10步: 将位移传感器的电缆通过导向穿出。
第11步: 将电缆插座的电缆也从孔中穿出,拧紧电缆插座。注意图中的提示(插座的方向)!

第12步: 将插头插入电路板 如有需要可以使用镊子
第13步: 固定电路板 注意: - 不要夹住电缆! - 密封圈放置的位置正确 在螺丝上使用Loctite 243紧固胶,图中箭头所指的螺丝不要使用螺纹胶。 螺丝紧固力为0.7 Nm
第14步: 注意密封件的位置 此处4个螺丝需要使用Loctite 243 螺丝的紧固力为2 Nm
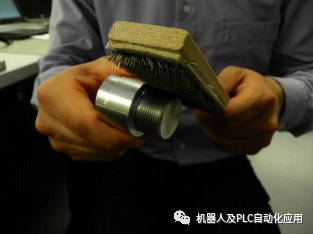
第15步: 使用锉刷将密封紧固件清洁干净。
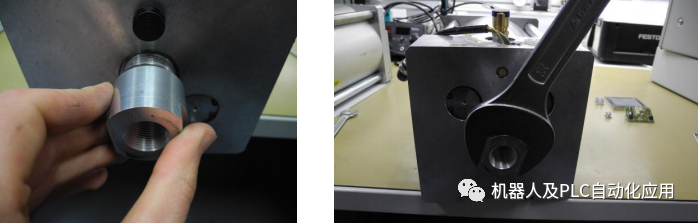
第16步: 安装紧固密封件,使用135Nm扭矩拧紧。
力标定不正确引起“ force timeout”(增压超时)一般由以下几个方面原因引起:
无法在2秒内达到设定压力。检查气源供给,压力是否足够高。 1、供压不足 2、气缸型号不对,软件内设置的型号与实际使用型号不符 3、比例流量阀MPYE出现故障,导致流量不足 4、“ force calibration”(压力标定)不正确
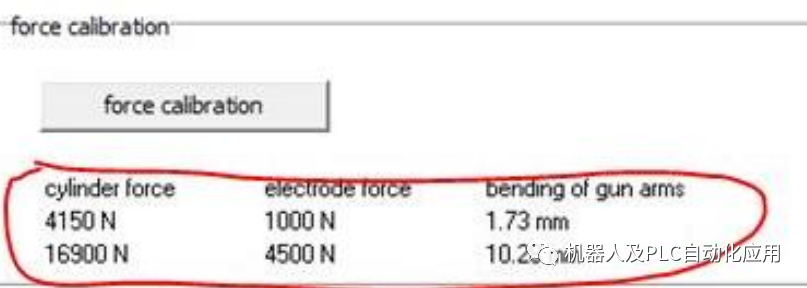
“ force calibration”(压力标定)不正确,
焊钳的压力比例为4.0左右,即主气缸输出4000N左右压力,能使电极帽压力达到1000N左右.这个比例值过大,使得在使用大的焊接压力值时,MPYE产生的压力无法达到焊接压力.
校准后的“ force calibration”(压力标定)状态如下:
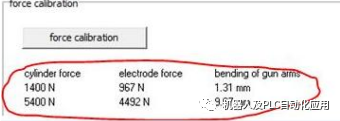
压力比例为1.4左右,即主气缸输出1400N压力,能使电极帽压力达到1000N左右。 更改压力标定后,焊钳恢复正常
编辑:黄飞
-
AB伺服电机抖动故障分析2023-11-23 2529
-
伺服焊钳机器人做EMZ的程序分析2023-09-01 1029
-
伺服电机十大故障分析2023-04-28 1965
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 2688
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 2021
-
FESTO焊钳故障报警分析2022-08-15 2943
-
气伺服焊钳为什么会发出钳E1超出软件限制报警2022-07-26 2104
-
KUKAC4大众版机器人报"伺服焊钳的滞后故障分析"如何解决2021-01-03 9918
-
气伺服焊钳平衡缸故障分析2020-08-10 3076
-
FESTO气伺服焊钳气管接错后故障分析2020-07-13 3497
-
日系伺服电机的故障原因分析以及故障排除2020-06-12 1360
-
电伺服焊钳铣削分析:用户铣削2020-06-11 3702
-
交流伺服电机振动故障的分析与解决方案2018-10-26 2135
全部0条评论

快来发表一下你的评论吧 !
