

浅谈防撞区和机器人轴过载保护
机器人
描述
两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
$TORQMON[n] 各轴的负载保护因数
程序模式下扭矩监控的电流因数(力感应扭矩)
如果机器人与物体碰撞,则机器人控制器会增加轴转矩以克服阻力。这可能会损坏机器
人,工具或其他物体。变量$ TORQMON []包含程序模式下轴转矩的当前公差范围。
$ TORQMON [轴号] =因子,默认值200,过载电流的百分比,即200%.
因此我就想如果我想在KUKA 机器人初期调试工作过程中减少互锁区设置失误而碰撞的损失,我们可否给变量$ TORQMON 减小。
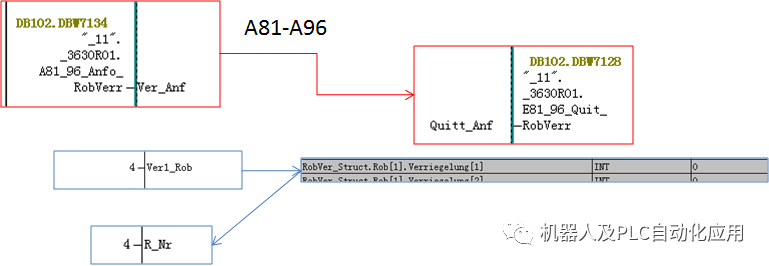
VASS标准的A/E41-56机器人互锁信号,A/E81-96用于机器人与PLC确认关闭互锁信号.
每个机器人标准有16个锁定命令可用,这些命令已永久分配给I / O。
在在线驾驶条件下必须查询相应的锁定输入。
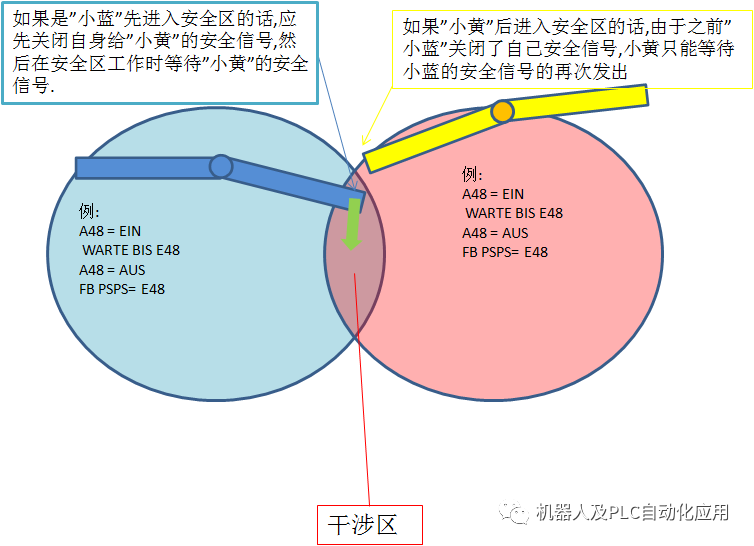
1.进入安全区时:
如果是”小蓝”先进入安全区的话,应先关闭自身给”小黄”的安全信号,然后在安全区工作时等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出
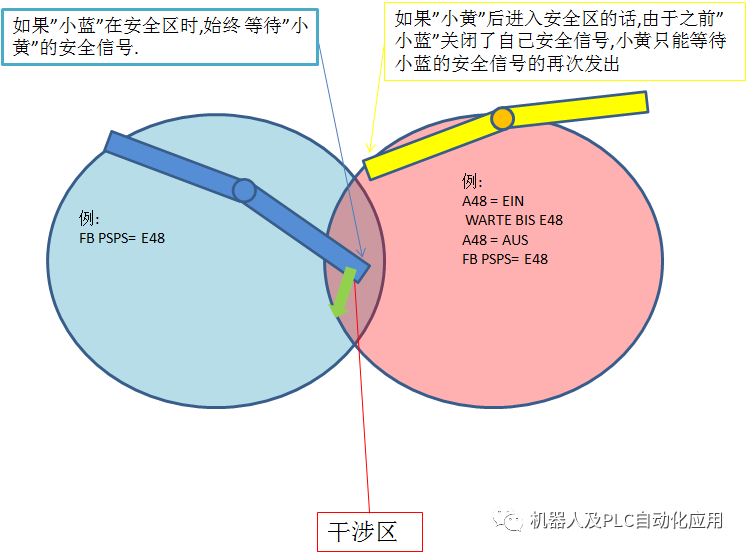
2.在安全区时:
如果”小蓝”在安全区时,始终 等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出.
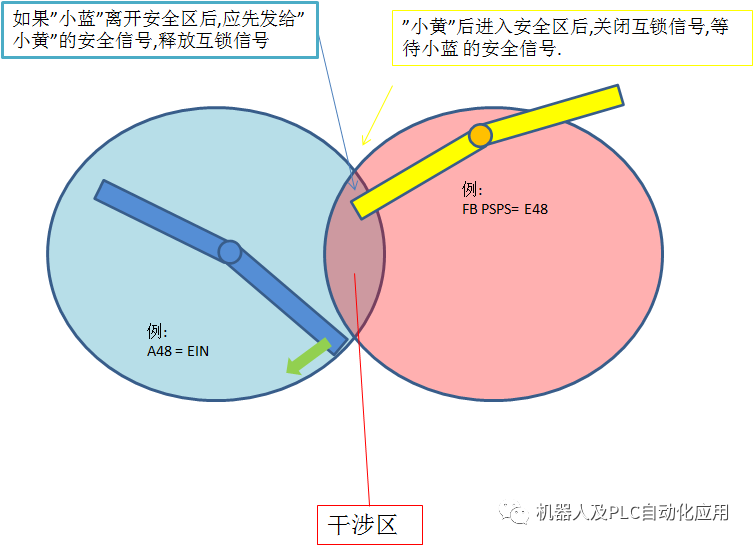
3.离开安全区时:
如果”小蓝”离开安全区后,应先发给”小黄”的安全信号,释放互锁信号.
”小黄”后进入安全区后,关闭互锁信号,等待小蓝的安全信号.
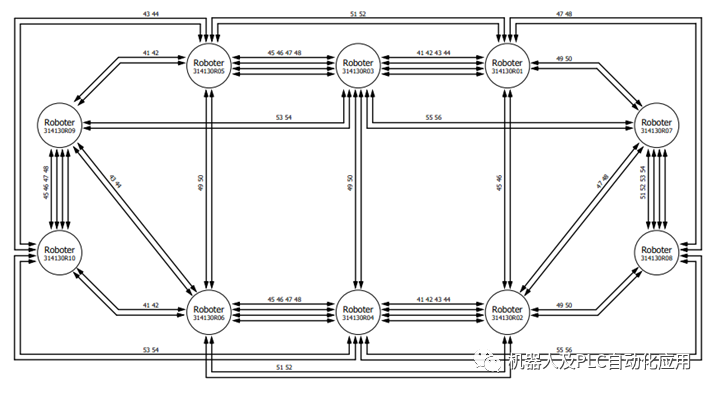
PLC对机器人干涉区的控制:
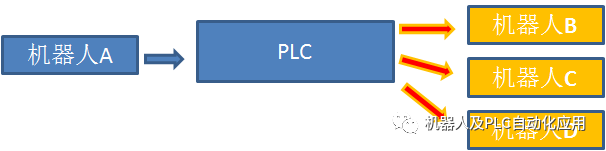
VASS 标准使用的互锁标准:互锁示意图,设定机器人之间互锁所使用的IO范围.
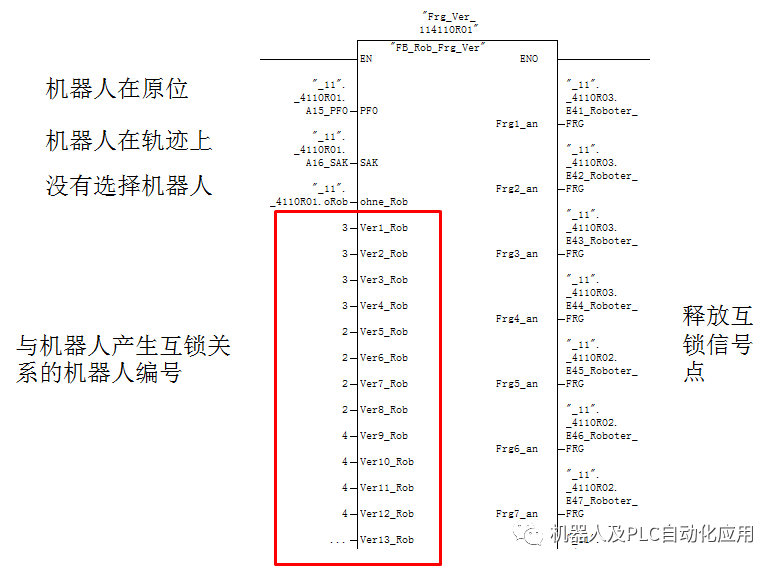
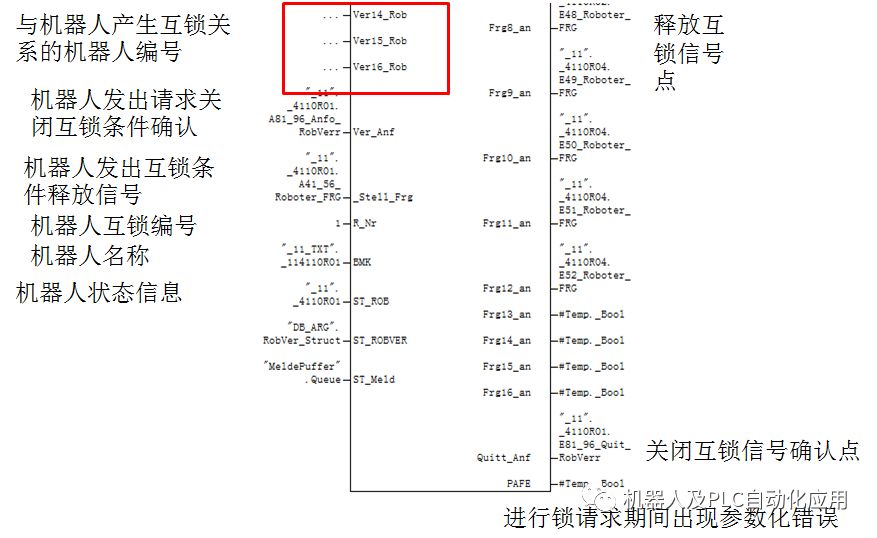
FB207机器人互锁信号控制:
可以设置机器人在原位时默认发出互锁释放信号.
编辑:黄飞
-
2026年全球机器人六轴力传感器市场分析报告2026-07-21 164
-
工业机器人的基本结构2015-01-19 9607
-
六轴工业机器人的主要特点2017-08-08 6710
-
单轴与多轴机器人的优缺点PK(深度总结)2017-11-23 3736
-
如何有效提高机器人伺服电机的过载能力2018-10-15 4261
-
怎么有效提高机器人伺服电机的过载能力2018-10-19 3790
-
多轴机器人的发展趋势2020-07-29 7538
-
工业机器人应用编程考核设备分享2021-07-01 2940
-
浅谈儿童陪护机器人2023-05-11 1198
-
大族机器人-六轴机器人2016-12-25 1762
-
六轴机器人如何选购?六轴机器人的选购技巧2019-03-21 1594
-
六轴机器人如何选购?2019-03-25 1369
-
六轴机器人是哪六个轴2019-04-02 87590
-
四轴机器人与六轴机器人的区别2021-08-26 15938
-
单轴机器人的安装方法2023-02-18 3798
全部0条评论

快来发表一下你的评论吧 !
