

逆变器离网并机的方法和实现
电子说
1.4w人已加入
描述
1、引入虚拟阻抗
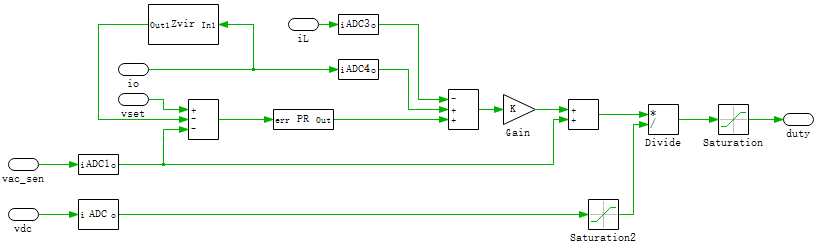
下垂控制的实现需要微网中逆变器的输出线路呈现电感性,这样有助于系统稳定。但微电网内的电压输电线基本都是阻性(长度较短)所以单纯用下垂控制不易稳定,诸多文献通过引起输出虚拟阻抗的方式,来让逆变器输出呈现感性,这样来提升下垂控制的稳定性。也是输出电压Vo - Zv(s) = Vo - Io2piLv,电压环error = Vref - Vo - Zv(s)*Io这样实现。

增加虚拟电阻后同时能把输出阻抗在低频呈现感性:
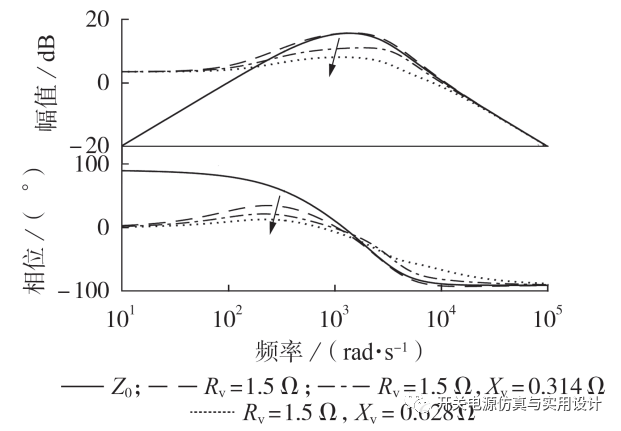
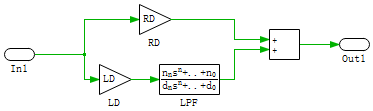
虚拟阻抗Zv(s)如果用sL的话,则是高通滤波器,会引入噪音。因此建议在低通滤波串联sL,这样可以提升稳定性。易得:Zv(s) = Rv + sL*wc/(s+wc),实现可见:
离网逆变器控制模块:
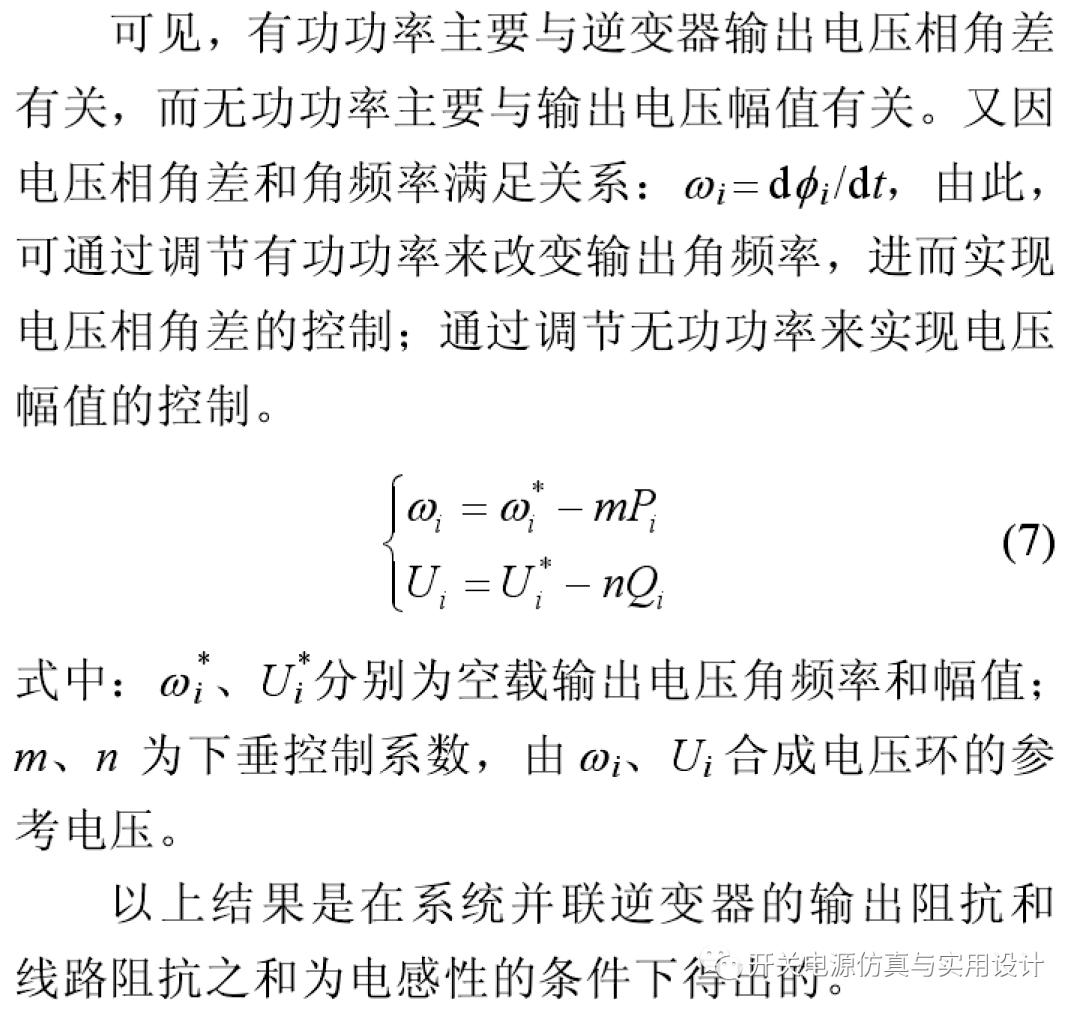
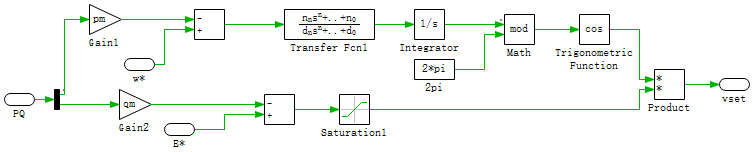
2、下垂控制:
实现:
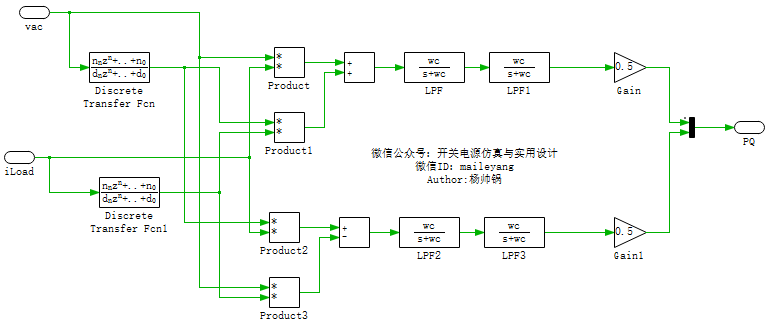
3、PQ计算
用移相滤波器得到正交数据,按三相PQ计算方法得到PQ:
4、运行策略:
- A模块开机带负载运行
- B监测PCC电压
- 同步A输出的频率和相位
- 启用下垂控制,监测PQ调整VF
5、测试
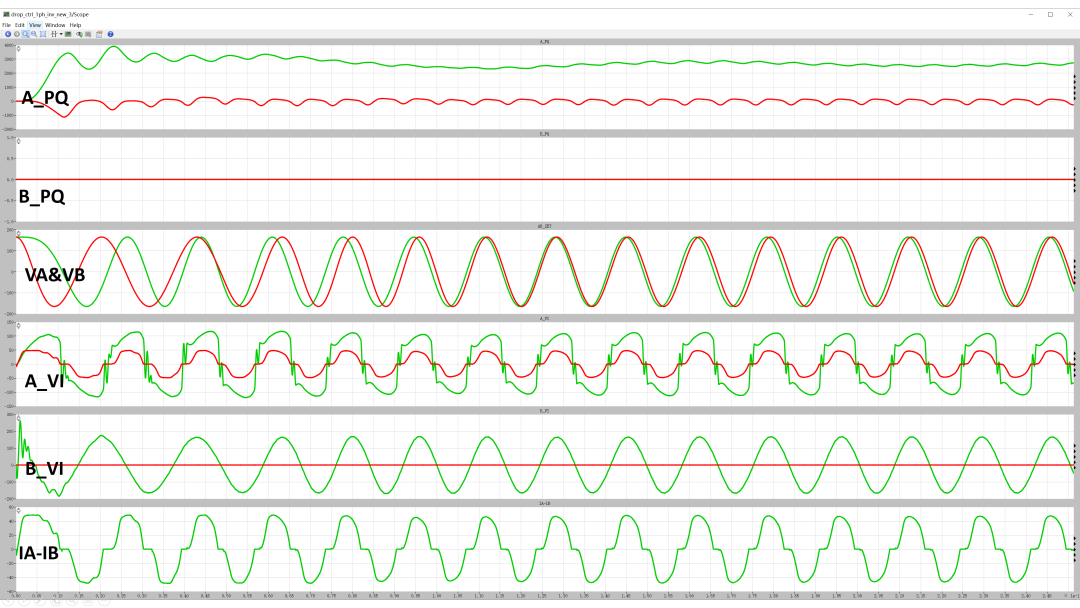
1、电阻负载加小电感
A单机运行,B同步PCC电压
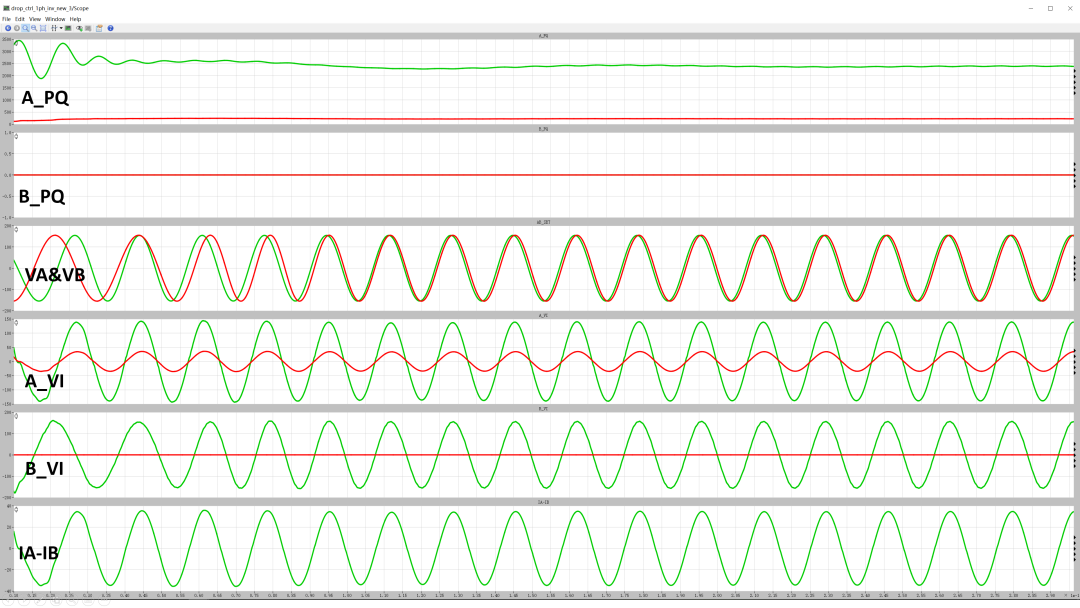
闭合B继电器,可见下垂控制逐步减小IA-IB电流:
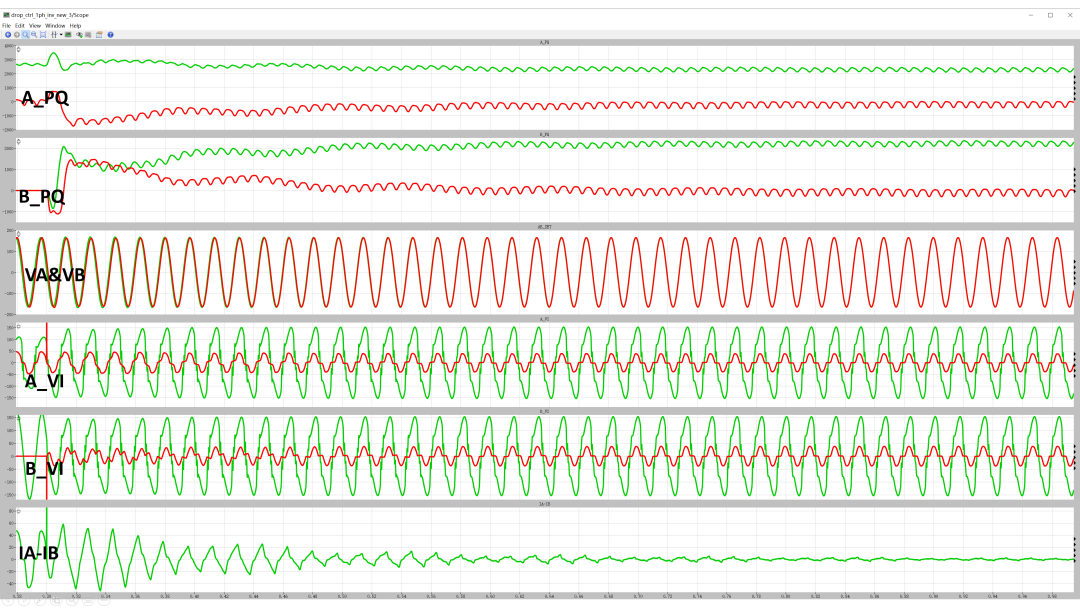
2、RCD负载
A单机运行,B同步PCC电压
 闭合B继电器,可见下垂控制逐步减小IA-IB电流:
闭合B继电器,可见下垂控制逐步减小IA-IB电流:
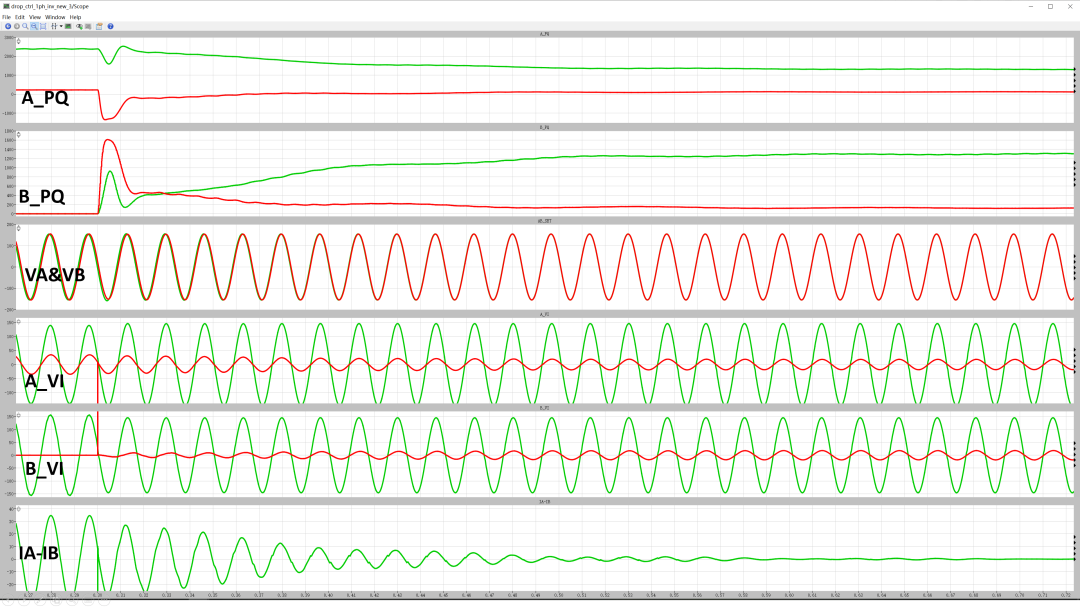
3、大电感小电阻
A单机运行,B同步PCC电压
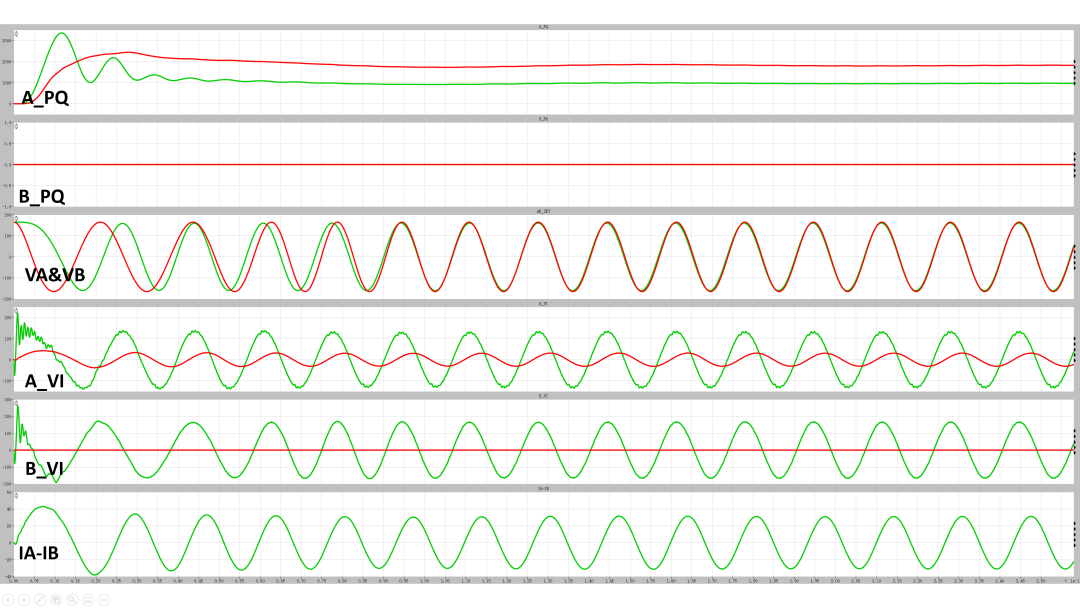
闭合B继电器,可见下垂控制逐步减小IA-IB电流:
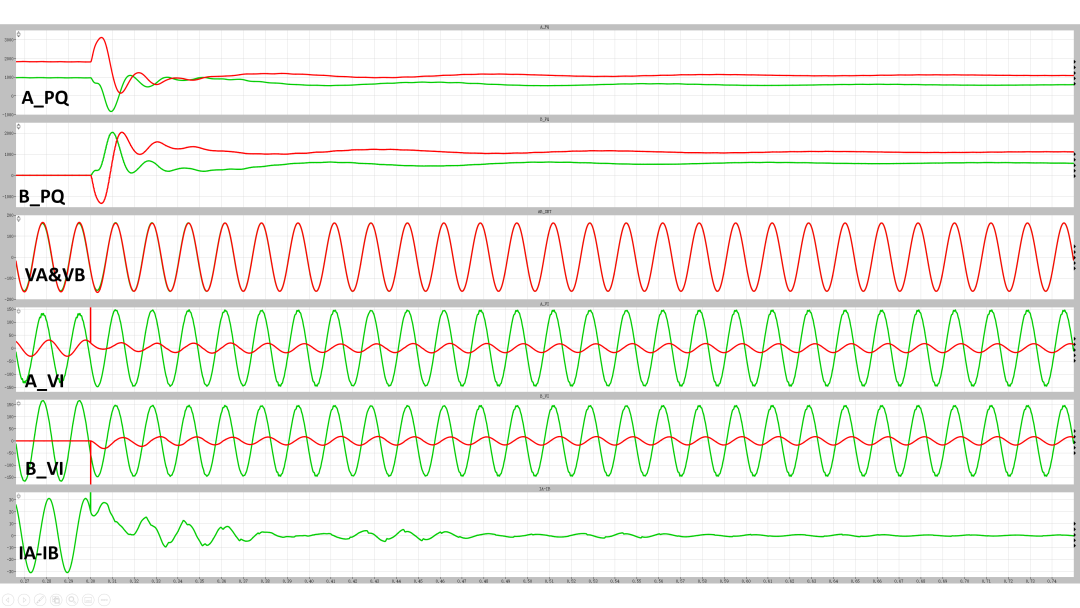
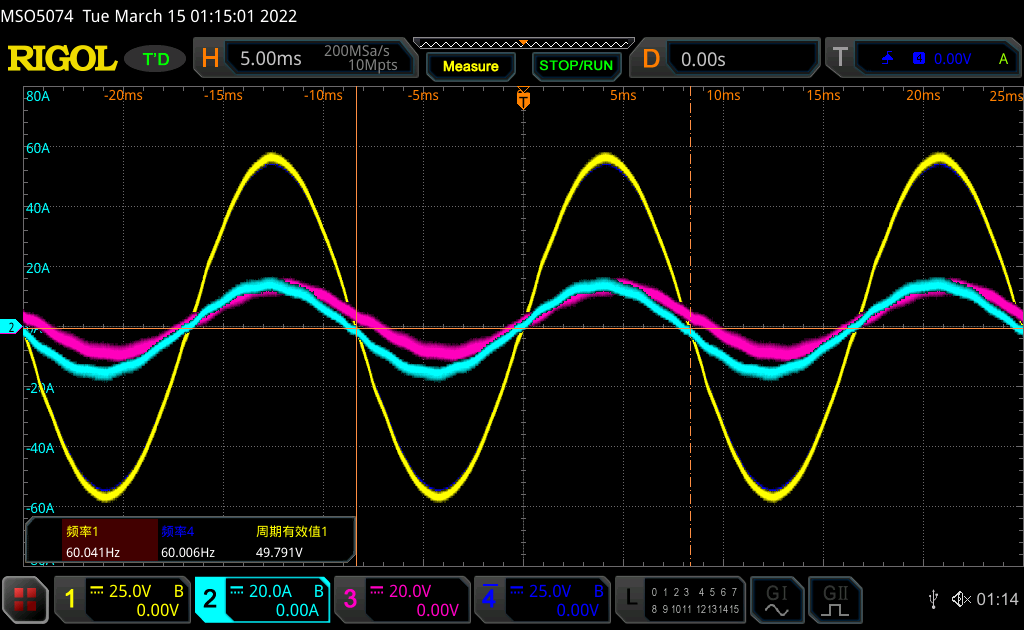
6、电阻负载实验测试:
B继电器闭合瞬间:
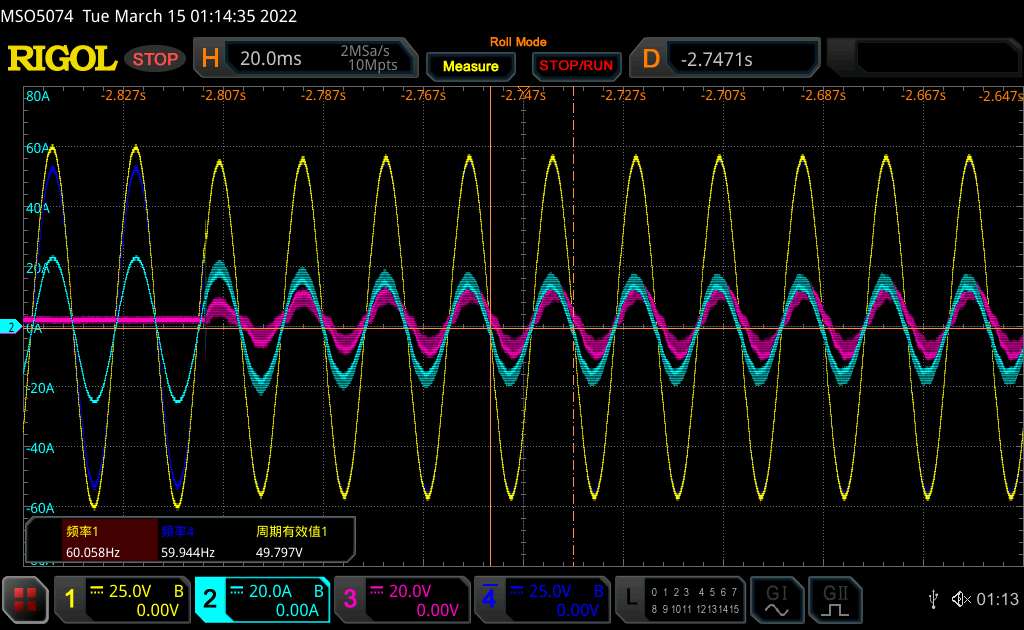
稳态:
小结:测试了下垂模式并联运行的基本原理,取得了一定的控制效果,对于非线性负载等其它负载情况,还需进一步研究和测试。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
离网逆变器的负载类型介绍深圳市宝威特电源有限公司 2024-07-20
-
光伏离网逆变器2015-07-06 13384
-
如何为家庭设计4000W离网逆变器太阳能系统2021-03-15 3202
-
光储互补并离网一体逆变器控制策略2015-12-28 1053
-
离网逆变器和并网逆变器的区别与特点2018-03-01 28076
-
离网逆变器和并网逆变器工作原理_并网逆变器如何离网使用2018-05-15 52034
-
如何选择光伏离网系统的逆变器2019-11-02 7599
-
离网逆变器到底是什么?并网逆变器的原理详细说明2021-01-03 29834
-
什么是并离光伏逆变器?并离光伏逆变器的优势介绍2023-07-13 1517
-
【古瑞瓦特并离逆变器厂家】离网系统设计要点2023-07-18 2984
-
什么是并离逆变器?并离逆变器的工作原理2023-07-28 4901
-
如何选择光伏离网系统的逆变器?2024-01-31 3166
-
并网光伏逆变器如何改离网发电2024-08-15 17476
-
飞虹MOS管在工频离网逆变器中的应用2025-03-11 1162
全部0条评论

快来发表一下你的评论吧 !
