

介绍一种移动宽带57 GHz - 64 GHz FMCW雷达传感器系统
电子说
描述
1、概述
本文介绍了一种移动宽带57 GHz - 64 GHz FMCW雷达传感器系统,旨在通过探测飞行中的射弹来提高执行和平或维和任务的士兵的态势感知能力。为了获得方位视场的瞬时覆盖,使用了频率扫描蜿蜒天线。因此,传感器被配置为采用扫描原理,通过将不同频率的宽带波形辐射到不同的空间方向。 2、简介
对于处于火力下的士兵来说,由于马赫锥的传播冲击波,不可能从声学上确定发射的明确来源。特别是在城市地形中,这个问题通过多路径传播进一步加剧。人口趋势表明,城市化进程日益加快,这使得未来所有军事行动都可能涉及城市层面。建立和平和维持和平行动期间的恐怖主义威胁和不对称战争表明,鉴于特别是狙击手构成的威胁,必须确保部署的部队具有自我保护和生存的能力。目前存在各种使用不同物理效果的狙击手探测系统。声学和光电解决方案往往是商用的,但它们的操作能力可能会受到高水平的后轮噪声、多径传播、灰尘、烟雾和雾气的限制。毫米波 (mmW) 雷达传感器提供小巧轻便的选择,可作为独立设备或多传感器套件的一部分。雷达被证明适用于此连接,因为它具有全天候能力,穿透灰尘和烟雾的能力,以及独特的警报阈值和低错误率。
3、系统概念
A. RCS研究
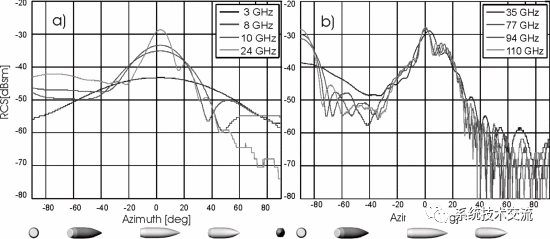
该概念研究解决了与雷达性能以及距离相关的探测概率和定位概率有关的问题。首先,确定弹丸的频率相关RCS作为弹丸纵横角的函数,用于各种频率范围。
B. FMCW-雷达设计
使用 FMCW 技术可提供高平均功率、良好的速度(多普勒频移)和距离分辨率。所需的雷达设计需要良好的测量精度、高更新率,以及在恶劣的雷达环境中检测非常低的雷达横截面(RCS)物体,例如来自近处和远处建筑物、移动车辆或人员的高杂波水平的农村地区。
C. 蜿蜒线天线
在扫描雷达进近的情况下,由于相对于弹丸速度的旋转速度较低,因此不可能使用机械转向天线。另一种选择是使用电动控制雷达波束,但在大多数情况下,由于必要的移相器和配电网络,传统的阵列馈电天线非常复杂、庞大且昂贵,并且限制了移动使用。使用基板集成波导(SIW)“漏波天线”允许通过简单的频移来控制主瓣,并导致阵列尺寸的显着减小。
D. 演示器的实现和首次测试
已经建立了一个移动(低成本)演示器(用于概念验证,并且出于演示目的,该系统基本上是用一个小角反射器(-9 dBsm)作为人类携带的地面移动目标的示例进行测试的。
4、结果分析
雷达系统可以可靠地用于检测某个区域的射弹,但它不是手持式解决方案。MMIC(单片微波集成电路)技术的最新进展可以进一步实现所有基本组件的小型化,用于狙击手检测目的的基于便携式毫米波的雷达传感器解决方案。这样的系统可以允许从单个站点或士兵进行精确的轨道重建,误报率可以忽略不计。因此,我们未来的工作重点是FMCW雷达作为便携式系统的小型化,涉及天线设计,尺寸和低功耗。
A. RCS研究
首先进行了分析,以确定雷达解决方案对狙击手探测和定位问题的可行性。使用CADRCS 模拟了各种射弹的频率取决于RCS和毫米W域中各个方面的多个频率,这也通过在电波暗室中良好控制的条件下进行测量来验证。
图2是给定偏振下所得RCS值与纵横角的函数关系图。使用已知的射弹RCS计算取决于检测概率的范围。
B. 60 GHz调频连续波雷达的概念和实现
该应用需要非常短的最大范围,可达 25 m。因此,工作频率可达W波段是可能的选择。但是,如上所述,雷达传感器系统以60 GHz的中心频率工作。尽管在工作频率处有很强的大气吸收线,但短距离的探测可能性也足够高,可以记录良好的结果。可能的用途之一是探测子弹或单兵携带防空系统(肩扛导弹)。特别是对于小口径武器,灵敏度成为此类应用中的主要问题,估计目标速度高达1000 m / s。因此,V波段内的工作频率是对象RCS(图1)、系统灵敏度和尽可能低的系统价格之间的最佳折衷方案。
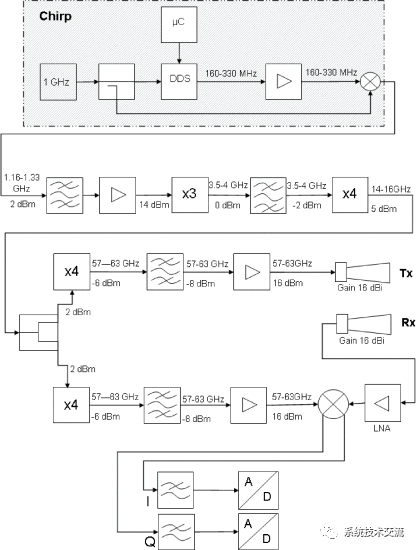
硬件概念基于宽带57 GHz-63 GHz FMCW前端,如图2框图所示。频率范围为14 GHz至16 GHz的RF处理级的LO由特殊的倍频器和滤波器级提供。在此之后,通过功率分配器在后续阶段对传输和接收分支的信号进行划分。应用的波形是一系列三角形斜坡,扫描时间为 $tau=500mu mathrm{s}$。
发射/接收链中的后续链路是有源倍频器,它是频率转换的低成本替代方案。该元件的非线性传递函数不可避免地以谐波的形式引起信号失真。通过滤波(高通),选择第四次谐波(对应于57 GHz至63 GHz所需范围的唯一泛音),并通过发射天线放大和辐射。发射的信号在接收分支中放大,与用作本振的辐射同步。在第一个接收步骤中,由吊具反射回来的信号由低噪声放大器(LNA)放大,噪声系数为4 dB。通过I/Q解调器,将前置放大信号与发射信号混合到基带,以便实现数字采样。使用同相和正交方法允许在保留相位信息的情况下解调高频信号。相位信息的评估是确定弹丸的速度(多普勒)或飞行方向(“单脉冲”)的先决条件。这种方法的另一个优点是,采样信号以复杂的形式直接收集。因此,使用数字信号处理更加灵活和高效。
此外,该传感器包含完整的传感器处理链,能够独立运行,并将跟踪的对象数据(范围、速度、方向)传送到人机界面(HMI)。I/Q 通道以 15 位和 75 MS/s 的速度数字化。直接数字频率合成(DDS)产生三角波形斜坡(线性调频)和模拟数字采样单元的触发器。
时域数据使用快速傅里叶变换(FFT)算法映射到频域。如果窗口宽度 $ au_{mathrm{o}}$ 小于 $tau/2$ ($ au$:扫描时间),并且窗口与频率扫描同步,则频域中的频谱分辨率由时域窗口函数确定。时域窗口宽度是执行FFT算法的时域信号序列的长度。窗口化函数是应用于时域输入信号链的加权函数。
在此典型的信号处理步骤之后,使用小波变换或短时傅里叶变换(SFT)使用高斯窗口将扫描概念的角度分辨率与目标范围相结合,进行时间-频率分析。在计算二维快速傅里叶变换后,该变换用于计算一系列距离多普勒矩阵以分离固定目标。基于FFT的方法适用于平稳随机过程。频率分辨率取决于数据的长度、采样率和所使用的数据窗口。对于飞行的弹丸,其雷达反射波形是非静止的。因此,当通过FFT分析时,相位相干数据集的长度是有限的。对于快速移动的目标,还必须考虑多普勒频移并进行校正。这种设置保证了最佳频率和目标位置分辨率。
C. 蜿蜒线天线设计
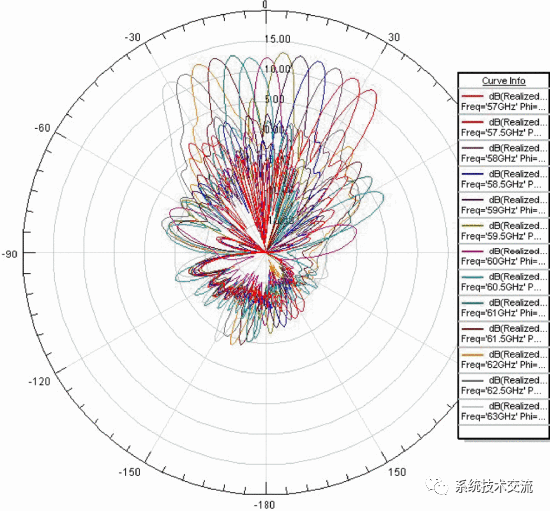
蜿蜒的天线沿水平天线轴线配备了许多等距但空间分离的槽(图 4)。由于辐射电磁波的建设性和破坏性干扰,形成了整体辐射方向图,如果所有插槽在60 GHz的中心频率“同相”退出,则将获得最大辐射,而辐射角度是相邻插槽之间相位关系的函数。如果工作频率从中心频率增加或减少,则槽内/减小与聚焦波束位置之间的相位差也会从中心位置(正交,相对于天线平面)变为任意指定角度。如图5所示,这种类型的天线只需改变馈电频率(啁啾),就可以实现高度定向的波束位置。辐射的波束宽度在6°(−3dB)处保持恒定,因为通过改变频率扫描光束。使用6 GHz的绝对带宽,可以使用~450 MHz的相对带宽进行距离估计(距离分辨率~33cm)。此外,孔径分布很容易受到锥形的影响,以控制(低)旁瓣电平或光束形状。
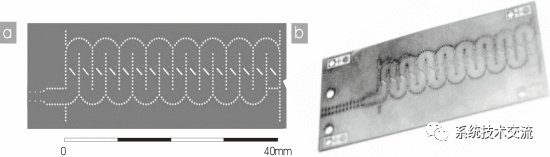
对于主环路相对于天线平面的正交方向,两个相邻槽的相位距离应该是中心频率$lambda/2$自由波长的一半。扫描范围可以通过两个相邻槽之间的相位差的变化来增强。由于蜿蜒的形状布局,偏振平面从一个槽到另一个槽倾斜180°。因此,需要对相邻槽进行反相位馈电,以获得具有最大辐射能量的建设性干涉图样。
与作为谐振结构的漏波天线概念相比,蜿蜒线天线不匹配以避免内部反射。如果每个槽的电阻与槽总数和波导阻抗的乘积完全对应,则整个能量应通过槽发射。理论计算和验证是使用开槽介电填充波导的有限元模型完成的。
D. 系统验证
第一次测试是在距离雷达系统不远的地方使用小型(RCS:−8dBsm)移动角反射器进行的。
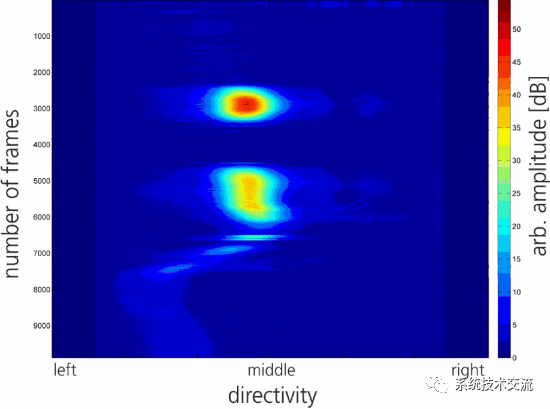
在时域数据中,目标位置由已知馈电频率/时间的蜿蜒线天线的方向性给出(在图 6 中以左、中、右视镜观察提及)。在天线视场的正中间可以观察到强烈的两次闪烁反射。将 30 秒数据集的频域计算为距离门。在距离传感器约5 m的距离内可以观察到强烈的反射,如图7所示。
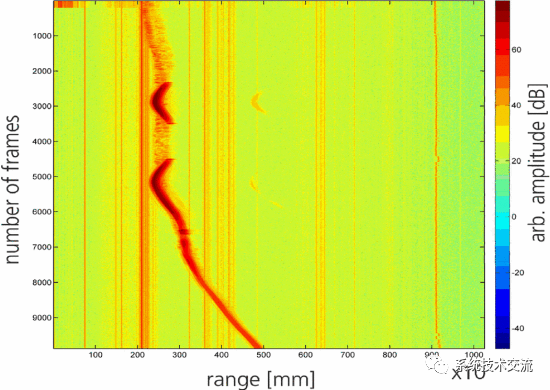
为了简化处理后雷达特征的可视化,首先将数据绘制在笛卡尔坐标中,以给出时频范围依赖性的印象。时频分析通过小波变换或短时傅里叶变换(SFT)完成,具体取决于所需结果的质量。
对快速移动的物体进行了第一次真正的现场测试,通过使用从5.56毫米到12.7毫米(cal.50)的不同口径的多种武器来改变射弹的大小。
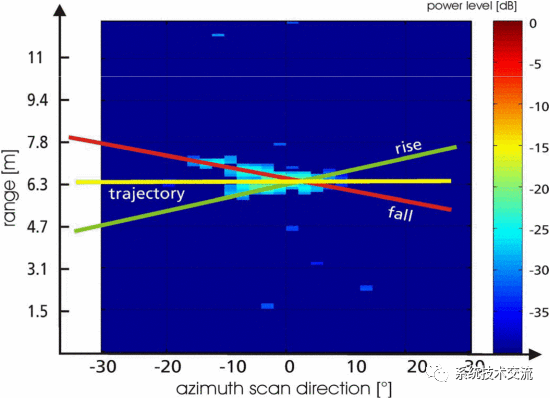
时频分析后的时域和频域组合图,带有估计轨迹的 DRAGUNOW 7.62 毫米弹丸的 V 形弹丸特征(黄条)。其他检测起源于噪声或杂散。(笛卡尔坐标系中的绘图)。特征由两个部分组成:下降 - 正多普勒频移,上升 - 负多普勒频移,来自用于频率斜坡(线性调频)的三角波形的上下啁啾。利用间断频率(IF)±多普勒频移和特征角偏差(上升和下降)的差异,可以估计轨迹,并将径向速度分量计算成弹丸的实际速度约为570 m/s±40 m/s。
在移动物体的情况下,弹丸通过期间的径向速度导致虚拟加速度,因此实际速度的计算在很大程度上取决于时间取决于检测角度。在几个多普勒细胞上进行相干积分是必要的,因为目标特征分布在相邻的多普勒细胞或不同的范围箱上。这种积分时间受到限制,因为频率扫描引起的光束方向的快速变化限制了光束内的弹丸观察时间。
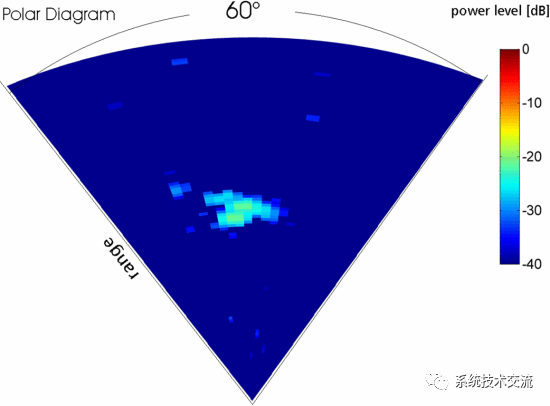
为了完成测量结果的呈现,将弹丸的雷达特征绘制在极坐标图中,该极图可以通过使用内部电子罗盘和全球定位系统(GPS)轻松地在地理参考数据中转换。
6、总结
通过不断开发用于弹丸探测的雷达系统,已经使用频率扫描天线和低成本硬件组件等最先进的技术,设置并演示了中心频率为60 GHz的FMCW宽带雷达演示器。结果表明,所选择的方法非常适合实时检测具有非常低RCS的慢速和非常快速移动的物体。为了实现物体周围的全向检测区域,需要多个雷达传感器,或者必须开发扩展的蜿蜒线天线概念以获得>60°的扫描角度。因此,将来必须研究和比较不同的实现概念。由于雷达的探测范围有限,在操作条件下,通过与其他类型的传感器(例如声学或光电传感器)进行传感器融合,将获得最佳结果。
审核编辑:刘清
-
AWR1642:77/79GHz FMCW雷达传感器的卓越之选2026-02-12 671
-
IWR2944:76 - 81GHz单芯片FMCW雷达传感器的卓越之选2026-01-26 483
-
AWRL6843/AWRL6844单芯片57 - 64GHz汽车雷达传感器深度解析2026-01-25 894
-
AWR1443单芯片77GHz和79GHz FMCW雷达传感器数据表2024-08-15 678
-
AWR1843 单芯片 77GHz 至 79GHz FMCW 雷达传感器数据表2024-08-13 566
-
AWR2943/44 单芯片 76GHz 和 81GHz FMCW 雷达传感器数据表2024-08-12 545
-
24GHz微波雷达FMCW测距系统设计概述2015-12-29 19392
-
24GHZ雷达传感器的选型及运用基础2013-12-20 5536
全部0条评论

快来发表一下你的评论吧 !
