

基于学习的激光雷达定位退化场景估计
描述
摘要

基于激光雷达的定位与建图系统是许多现代机器人系统中的核心组成部分。其直接继承了环境的深度与几何信息,从而允许精确的运动估计与实时生成高质量的地图。然而,不充分的环境约束会导致定位失败,这种情况经常发生在诸如隧道等对称的场景中。本文的工作准确地解决了这个问题,通过神经网络法来检测机器人的周围环境是否发生退化。我们特别关注于激光雷达的帧间匹配,因为其是许多激光雷达里程计的至关重要的部件。与之前的方法不同的是,我们的方法直接根据原始的点云测量来检测定位失败的可能,而不是在配准过程中检测。此外,之前的方法在泛化能力上有所局限,因为需要人为调节退化检测的阈值。我们提出的方法通过从一系列不同的环境中学习来使得网络在各个场景中都表现得更好,从而避免了这个问题。此外,该网络专门针对模拟数据进行训练,避免在具有挑战性和退化且通常难以访问的环境中进行艰巨的数据收集。所提出的方法在未经任何修改的情况下,在具有挑战性的环境和两种不同的传感器类型上进行的实地实验中进行了测试。观察到的检测性能与最先进方法在专门调整阈值后的性能相当。
主要贡献
提出一种基于学习的方法,来检测单帧点云在六个自由度上是否发生退化。
提出一种验证方法,来验证四足机器人在挑战性与退化场景下的定位能力。
所有部分都经过完备的设计与实现,包括数据集的采集与生成。相关的部分均会在机器人社区开源。
方法论
1. 问题建模
本文想检测机器人在某个时刻的定位能力:(localizability)。这可以通过一个6维的向量表示:
其中,x, y, z表示平移方向上的分量,Φ,θ,ψ表示旋转方向上的分量(欧拉角表示)。向量d_k的每个分量都是二值的(0或者1,其中0表示该分量上的定位信息可靠,1则表示不可靠)。
估计d_k的过程可以构建为一个多标签二值分类问题,并且通过一个神经网络分类器得到结果。
2. 训练数据生成
按照上述的问题建模方式,一个重要的点是如何生成带有标签的训练数据?具体而言,对一个点云,如何评估它在六个自由度上的退化情况?
本文提出的方法是加扰动然后看配准误差的方式。对于某个点云s以及采集到它时机器人的位姿T,生成M个子点云,生成一个子点云的方式为:
1. 对位姿进行扰动,扰动的值通过对0均值高斯分布进行采样,每个维度上的高斯分布的δ为:

2. 根据扰动后的位姿,在仿真环境中,通过光线投射来获得一个新的子点云。
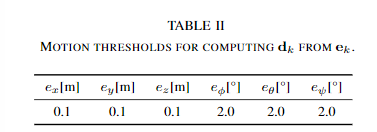
将这M个子点云与原始点云进行配准,配准方法为点到面的ICP方法。计算每个子点云配准得到的transform与原始扰动的transform的差值e,分解到六个维度上取绝对值,并相加求平均值得到e_p。通过评估e_p在6个维度上是否超过特定的阈值,来判断原始点云是否容易在特定的维度上发生退化。6个维度上的阈值为:
3. 网络结构
上一步获得了带有标签的点云,这一步则是通过网络来学习并训练。本文所采取的网络结构基于3D ResUNet(见论文Fully convolutional geometric features),其具体网络结构为:
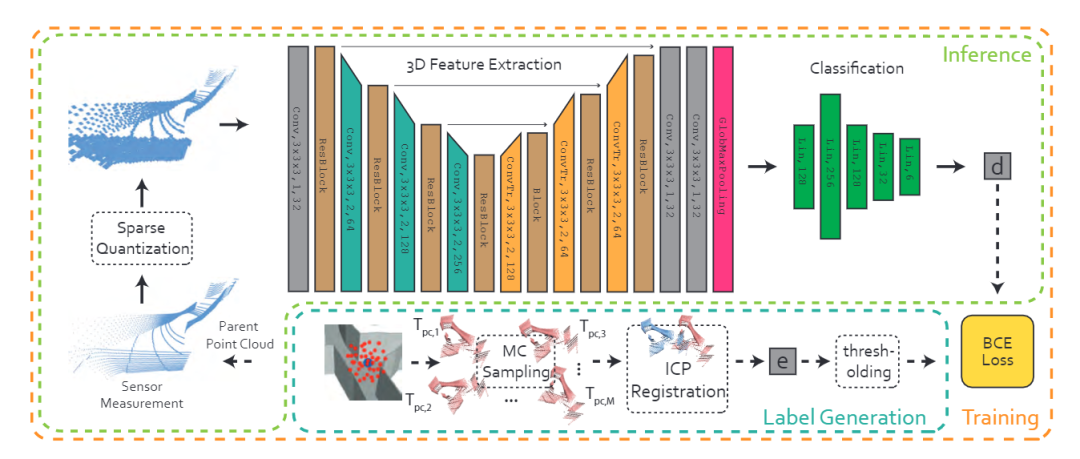
分类网络则是一个5层的MLP,输出是一个6维的向量。
该网络的损失函数定义为:

其中,t表示第k个点云在第i个分量上的标签,而p则表示网络预测的对应的概率值。
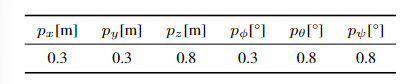
由于网络预测的是一个概率值,在使用时本文通过对各个维度设置不同的阈值来确定各个维度是否发生退化,其值为
方法论
1. 消融实验
在该实验中,将特征提取网络换为Point-Net,并且比较了更换前后的各项分类性能:
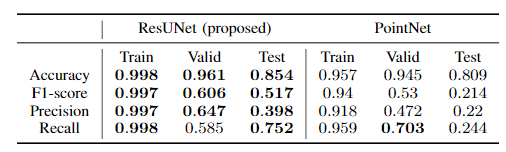
从表格中可以得出,在大部分指标中,ResUNet均高于PointNet。
2.实地实验
在三个场景中进行了场地实验:隧道、开阔户外与城镇场景。采用的SLAM框架为CompSLAM(见论文Complementary multi–modal sensor fusion forresilient robot pose estimation in subterranean environments)。这个框架中,所用的评估退化的方式是Ji Zhang的论文“On Degeneracy of Optimization-based State Estimation Problems”中提到的方法(该论文在泡泡机器人-点云时空中亦有详细翻译,有兴趣同学可以自行搜索)。CompSLAM在检测到激光雷达出现退化后,切换为VIO的结果进行递推,而在没有退化的场景中,用VIO的结果作为LOAM的先验进行帧间配准。本文将该方法替换为所提出的基于学习的方法,并与原始版本的CompSLAM进行比较。
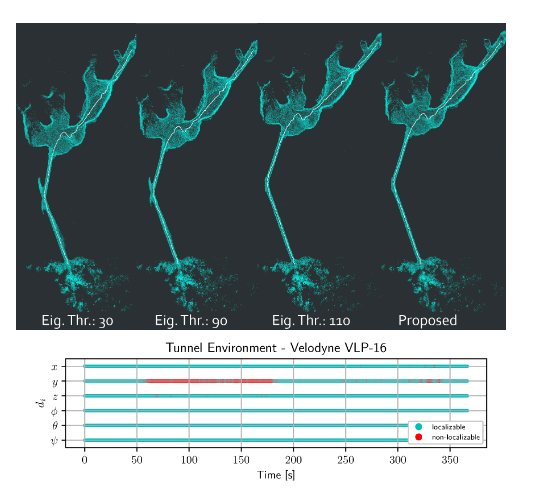
a. 隧道场景:
下图给出了隧道场景中的建图效果。其中左边三幅图为Ji zhang的方法采用不同阈值后的结果,最右则为本文提出的结果。而下面的条状图则表示各个维度出现退化的时间。可以看出,本文提出的方法与Ji Zhang的方法在阈值为110时的效果类似。
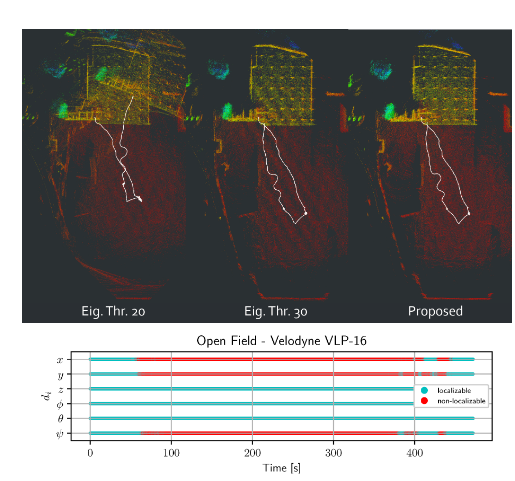
b. 开放户外场景:
同隧道场景。
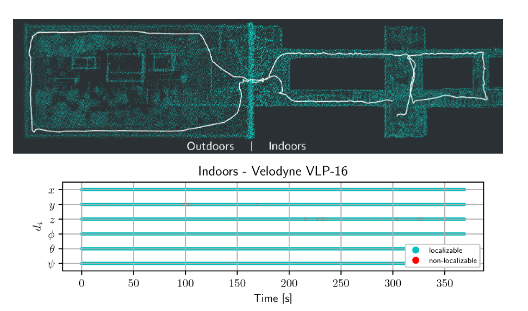
c. 城市场景:
这个场景中没有做对比试验,而是仅仅测试了提出的方法。测试场景为咖啡店的内部与外部。机器人从室内走到室外并且回到室内,可以看到建图保持了较好的一致性,并且学习到的6维向量表示全程都没有发生退化情况
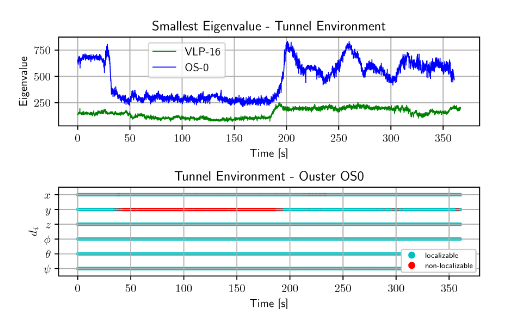
3. 泛化实验
对于隧道场景,利用VLP-16与Ouster 128线的激光雷达进行测试。从下图中可以看出,利用Ji zhang的方法(即求一个特定矩阵的最小特征值),对于两个传感器,其最小特征值的差别是巨大的。然而本文所提出的方法仍能比较好的检测到隧道的特定段发生了退化,并且与场地实验中的隧道实验保持一致。
评价与未来工作
1. 个人评价
这项工作的创新在于直接对点云进行退化的评估,而不是根据配准的结果。数据的生成与训练的方式都比较直接易懂,并且实验的效果也很好。
这个方法是应用在类似于LOAM的系统上的,因此制作训练集的时候,只用单帧点云的匹配结果来生成退化label。对于类似于Fast-LIO这样直接进行scan-map配准的方法,这种制作训练集并训练的方式不一定可靠:因为在一些场景下,可能出现scan-scan配准退化,但scan-map不一定是退化的(local map有更丰富的信息)。解决这个问题的途径之一,可以在训练的时候也采用scan-map的配准方法来评价配准误差。
2. 未来工作
本文的作者提出的未来工作有:
1)网络直接出6x6的位姿协方差矩阵。
2)根据退化信息来决定优化的时候,仅仅优化部分维度而不是所有维度。
审核编辑 :李倩
-
激光雷达技术的基于深度学习的进步2024-10-27 1970
-
激光雷达的应用场景2024-04-10 4007
-
激光雷达是什么,激光雷达的应用说明2022-06-20 26661
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30463
-
激光雷达2021-01-17 20188
-
机器人和激光雷达都不可或缺2019-02-15 6221
-
AGV激光雷达SLAM定位导航技术2018-11-09 10083
-
激光雷达除了可以激光测距外,还可以怎么应用?2018-05-11 6110
-
北醒固态设计激光雷达2018-01-25 5864
-
消费级激光雷达的起航2017-12-07 7483
-
激光雷达究竟为什么这么牛,这么贵2017-10-16 7143
-
常见激光雷达种类2017-09-25 13998
-
激光雷达分类以及应用2017-09-19 8898
全部0条评论

快来发表一下你的评论吧 !
