

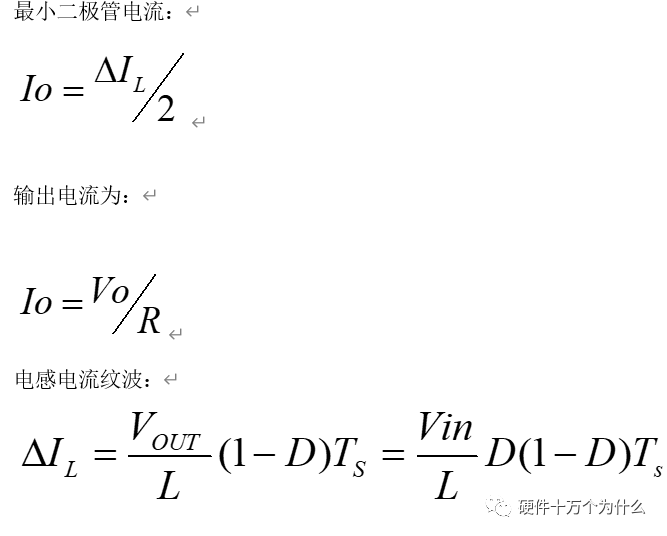
Buck电路之CCM、DCM、BCM的定义
电子说
描述
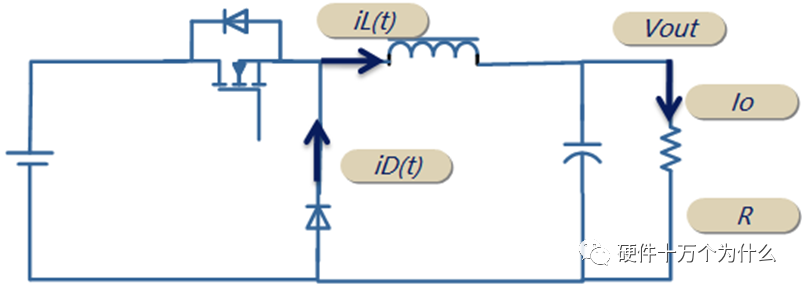
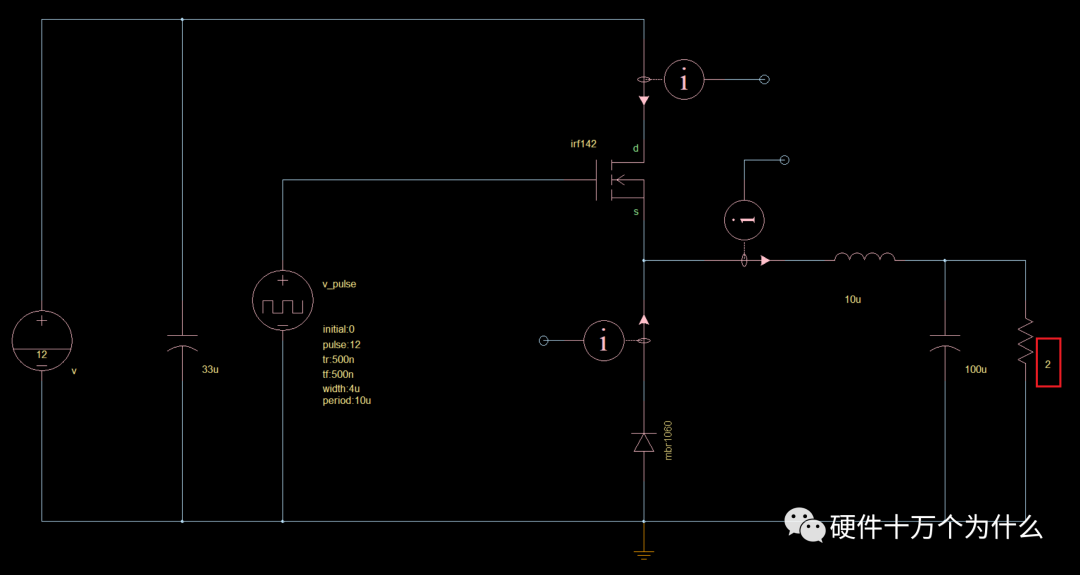
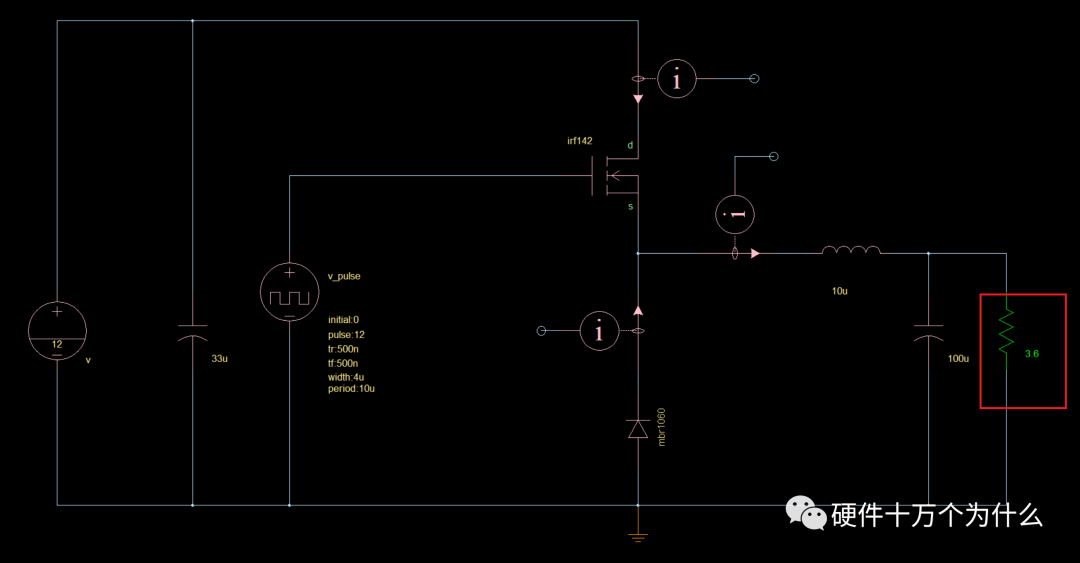
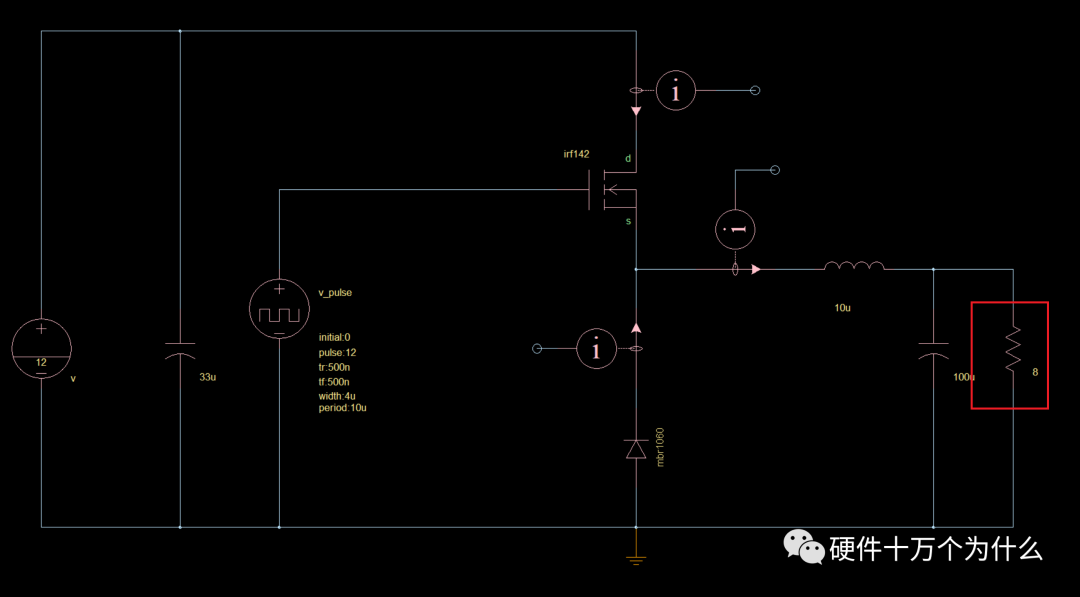
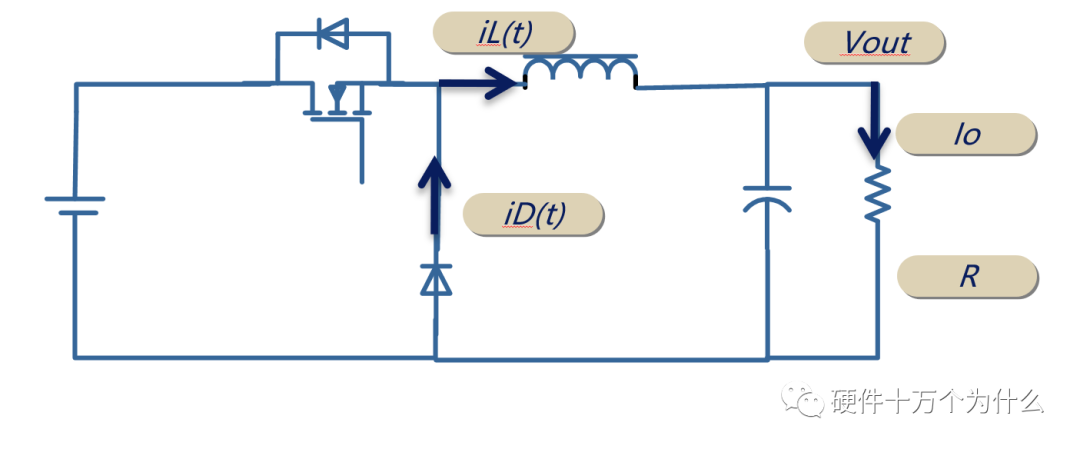
一、Buck开关型调整器:
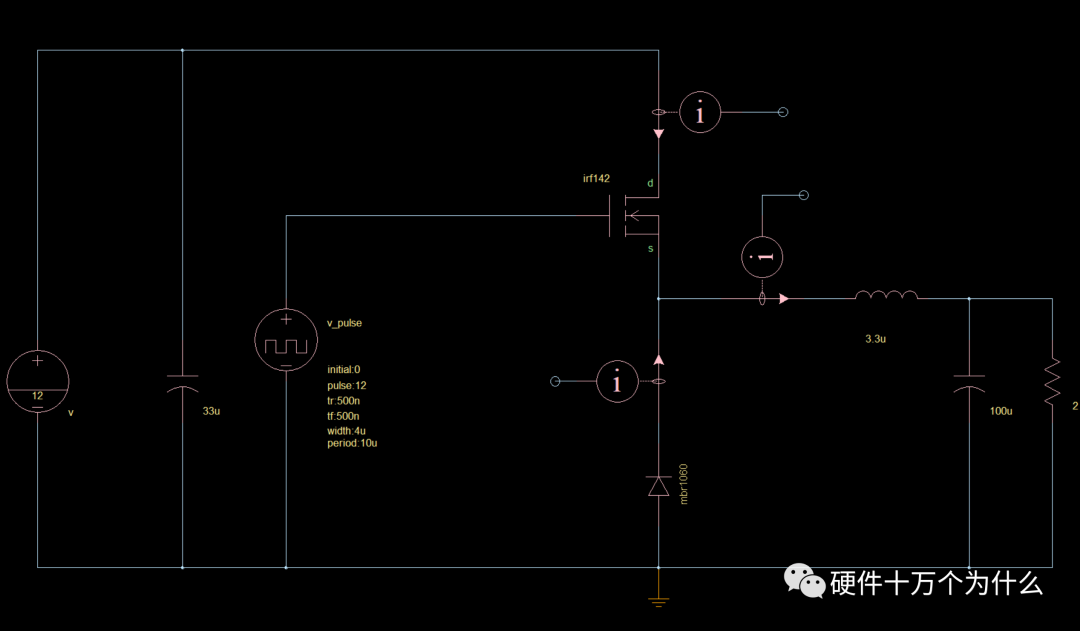
可以看到:
1、输入电压12V
2、输入电容33uF
3、控制脉冲:电压12V,上升时间500ns,下降时间500ns,脉宽4us,周期10us
4、输出电感3.3uH
5、输出电容100uF
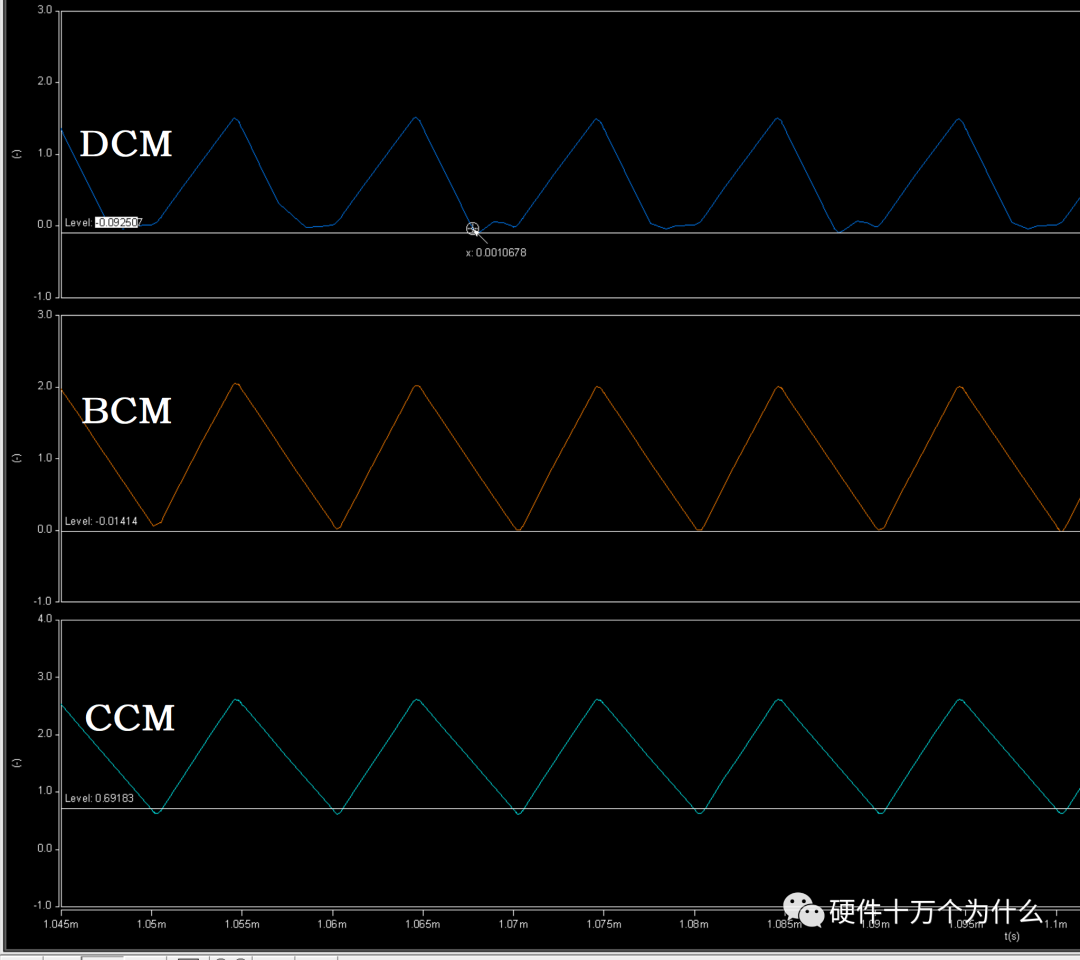
二、CCM、DCM、BCM的定义:
1、CCM (ContinuousConduction Mode),连续导通模式:在一个开关周期内,电感电流从不会达到0A。或者说电感从不“复位”,意味着在开关周期内电感磁通从不回到0,功率管闭合时,线圈中还有电流流过。
2、DCM,(Discontinuous Conduction Mode)非连续导通模式:在开关周期内,电感电流总会到0,意味着电感被适当地“复位”,即功率开关闭合时,电感电流为零。
3、BCM(Boundary Conduction Mode),边界或边界线导通模式:控制器监控电感电流,一旦检测到电流等于0,功率开关立即闭合。控制器总是等电感电流“复位”来激活开关。如果电感值电流高,而截至斜坡相当平,则开关周期延长,因此,BCM变化器是可变频率系统。BCM变换器可以称为临界导通模式或CRM(Critical Conduction Mode)。
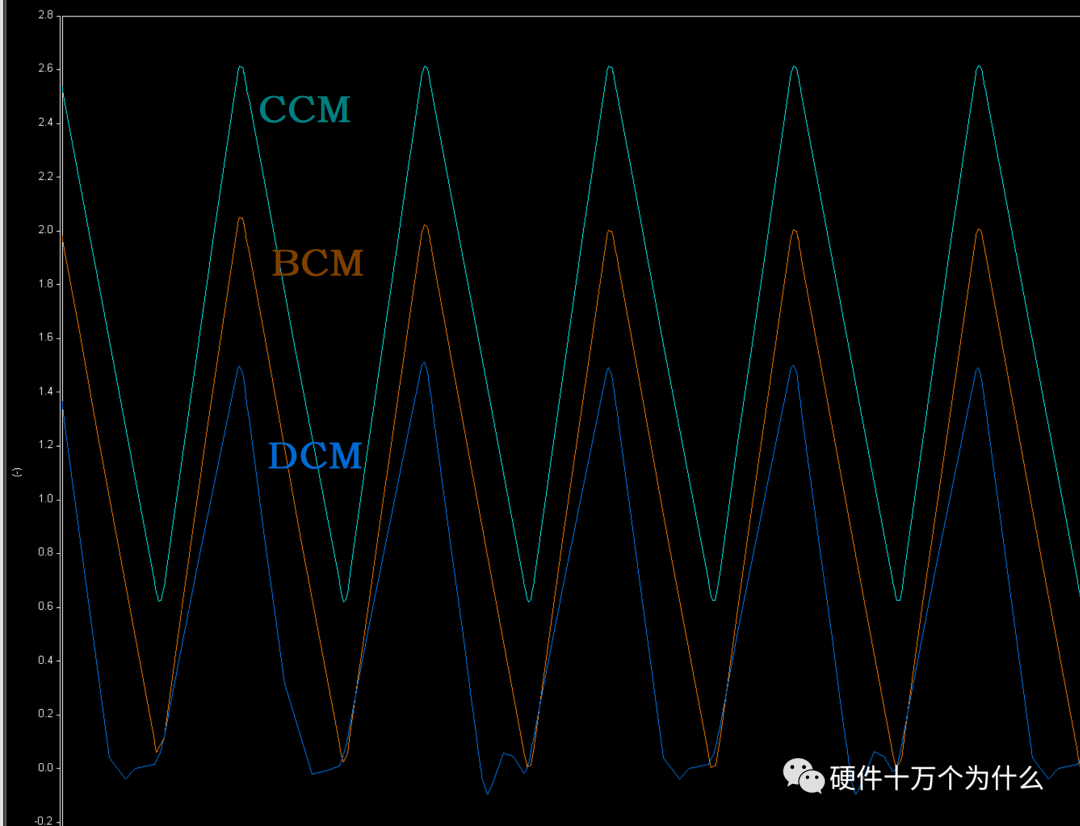
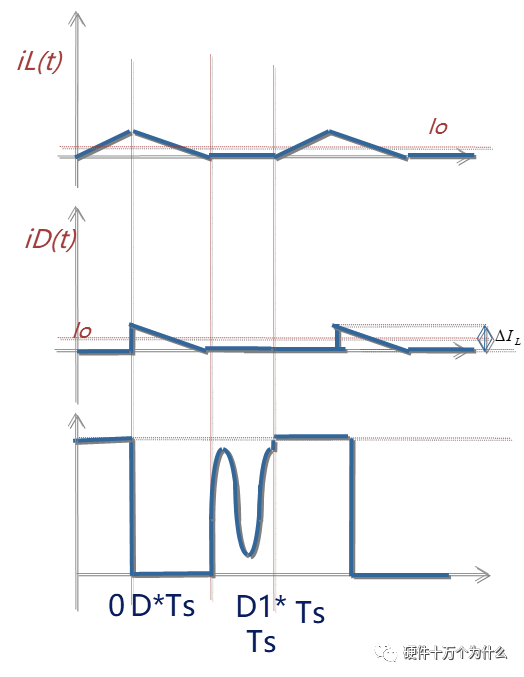
三个波形在一起对比:
三、三种工作模式的特点:
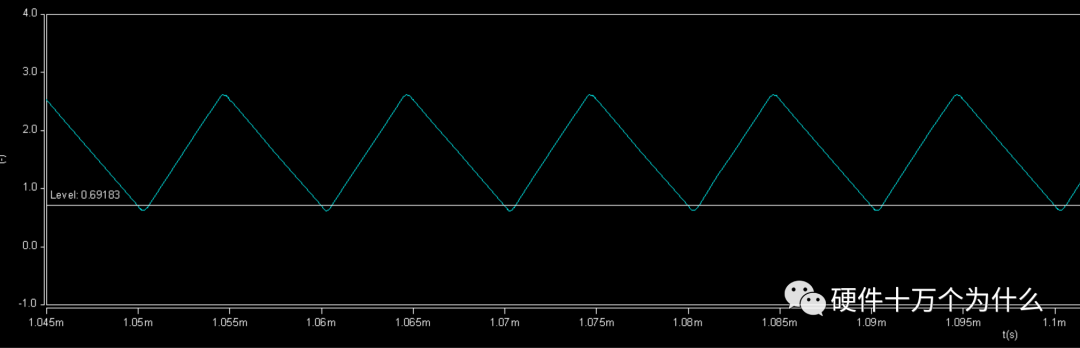
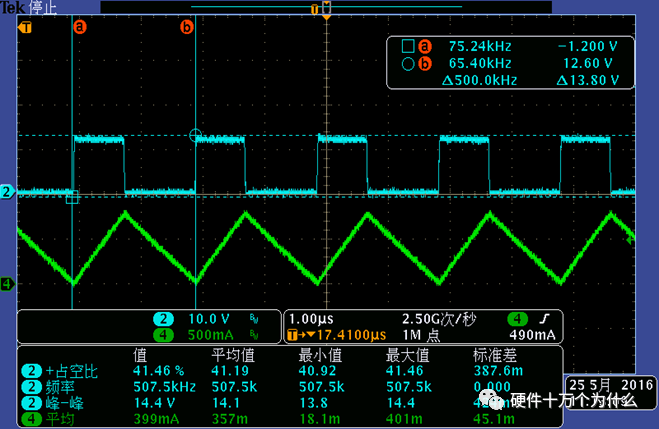
CCM模式(非同步BUCK为例)
为了说明问题,我们只在方正电路上修改了负载为2欧姆,增加I,使其更大,这样电感电流是基于I进行变化的,纹波电流与0A距离更远。
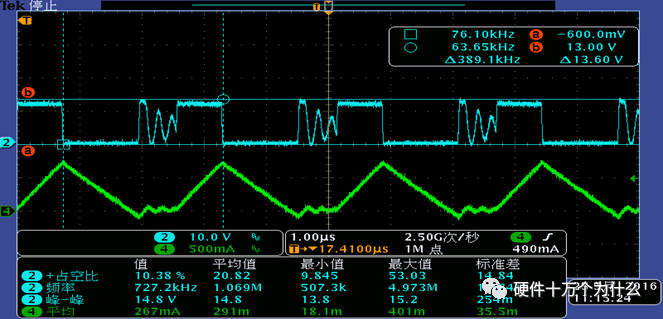
实测波形为:
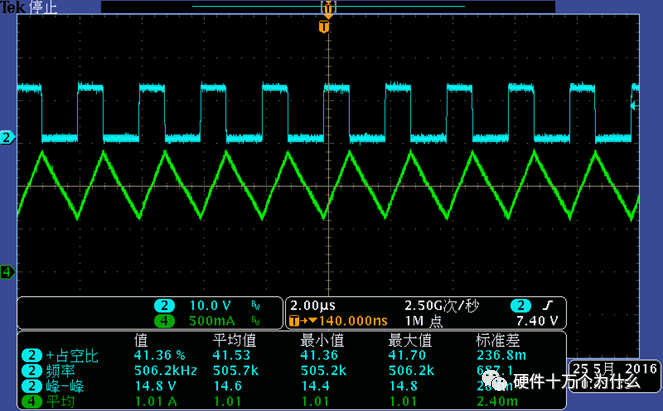
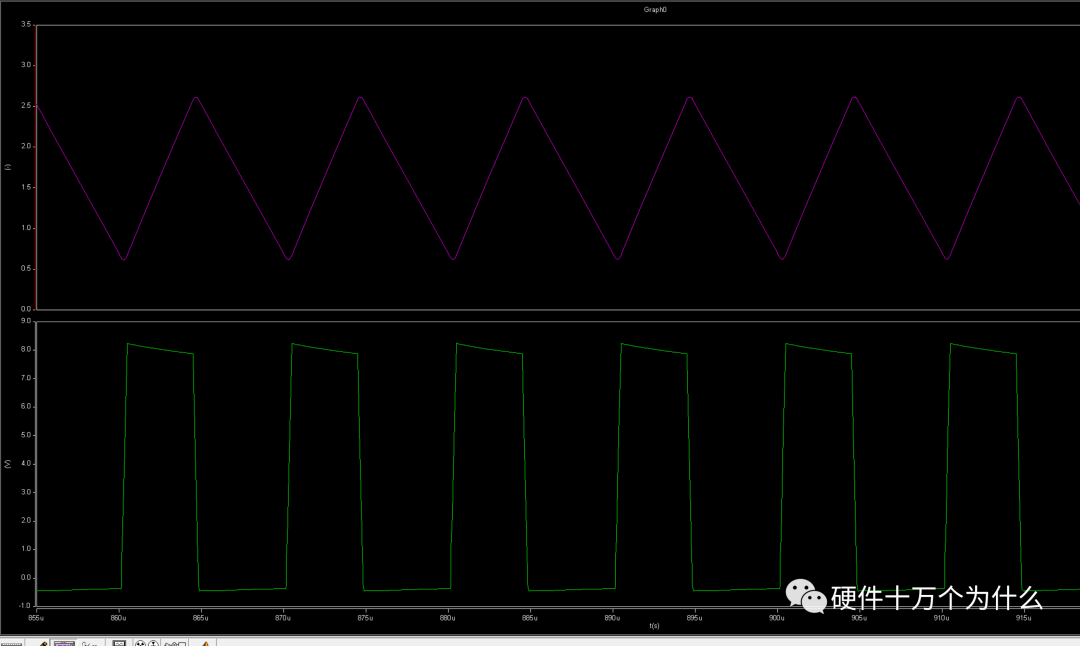
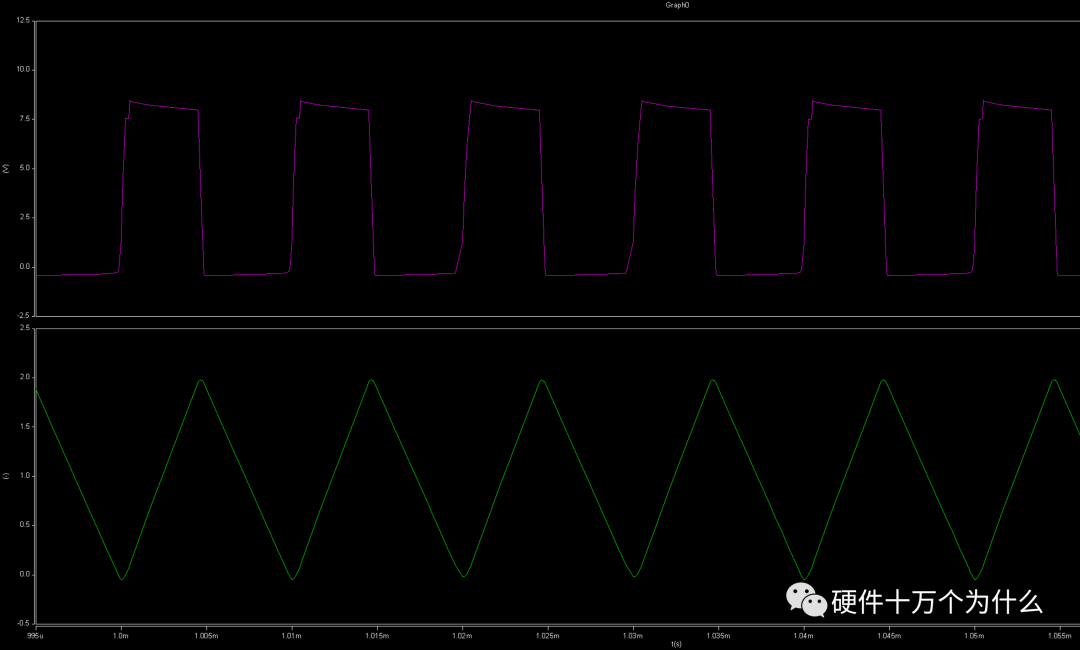
仿真波形:
紫色:IL电感电流
绿色:Vsw公共开关点电压
非同步控制器的降压变换器Buck工作于CCM,会带来附加损耗。因为续流二极管反向恢复电荷需要时间来消耗,这对于功率开关管而言,是附加的损耗负担;
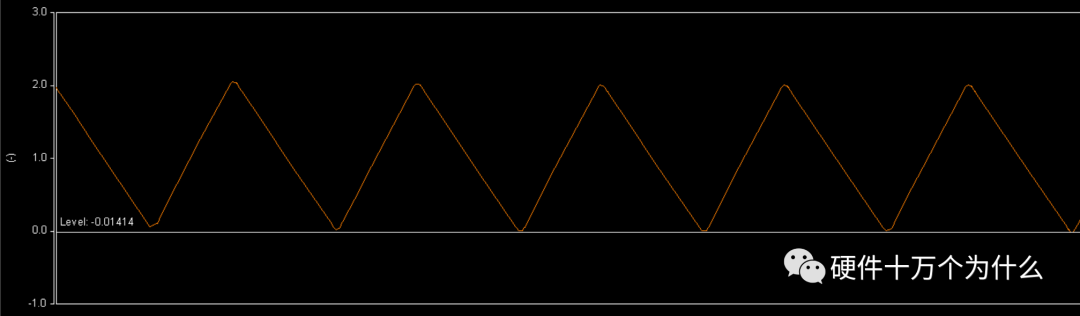
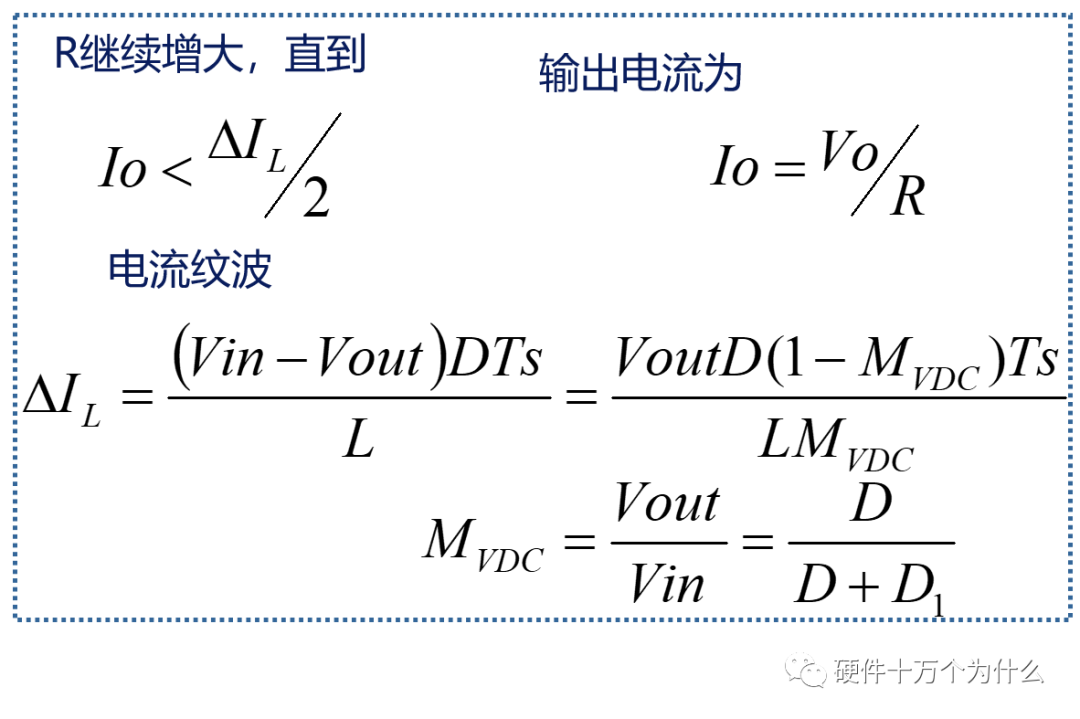
BCM是一种特殊的CCM,它的电感的电流最小值为0
此时我们把负载调为3.6Ω,这样让纹波电流压着0A,形成一个临界的状态。
实测波形:
仿真波形:
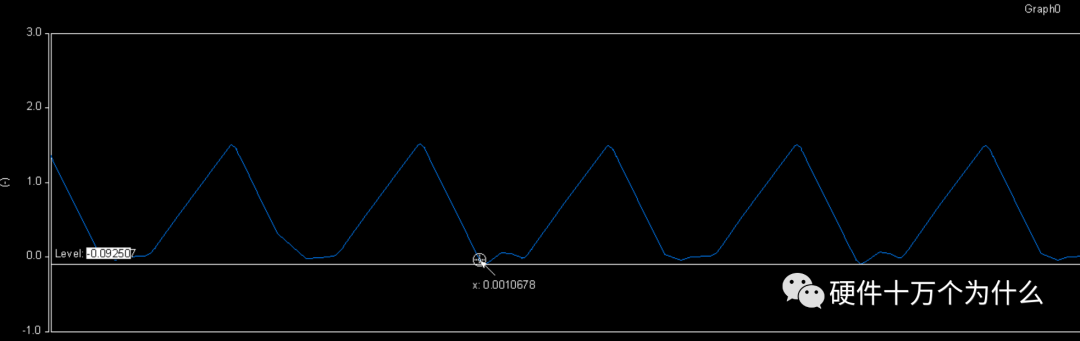
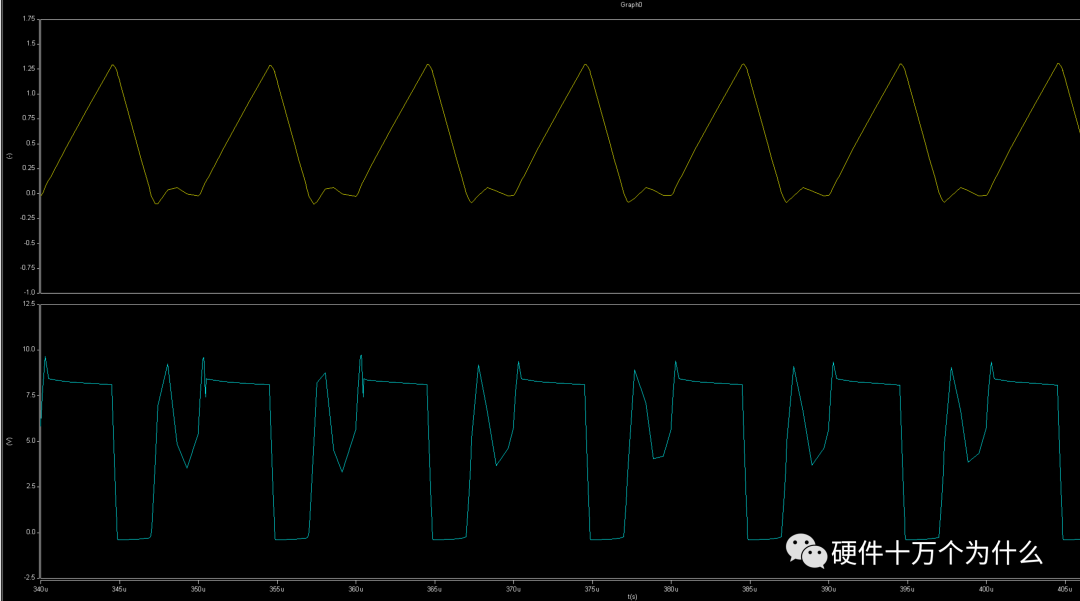
DCM模式(非同步BUCK为例)
我们把负载调小,也就是IL电源的输出电流变小了。相当于上面的纹波电流继续往下移动,穿过0A的坐标线。我们知道由于二极管的正向导通性,上管关闭。所以电感上的电流不会出现负数(我们设定输出方向为正方向)。此时就会出现电感上电流为0。
实测波形
仿真图中,黄色为电感电流,蓝色为Vsw电压
四、CCM与DCM比较:
1、DCM能降低功耗的,DCM模式的转换效率更高些;
2、工作于DCM模式,在电感电流为0的时候,会产生振荡现象;
3、工作于CCM模式,输出电压与负载电流无关,当工作于DCM模式,输出电压受负载影响,为了控制电压恒定,占空比必须随着负载电流的变化而变化。
-
BUCK电路工作在CCM模式的条件是什么?2024-02-01 3629
-
BUCK电路轻载条件下DCM与CCM的差异有哪些?2024-01-31 4512
-
Buck电路的CCM、DCM、BCM模式2023-11-24 3010
-
BUCK电路的CCM和DCM模式2023-03-17 6760
-
细说Buck之CCM、DCM、BCM2022-11-02 14553
-
请问什么输出电流范围下得buck电路适合在DCM下工作?2022-10-17 17434
-
DCM与CCM2021-11-07 945
-
什么是CCM和DCM2021-10-29 2132
-
开关电源Buck电路CCM及DCM工作模式2021-10-22 1325
-
CCM BUCK和DCM BUCK电路2011-05-13 8902
全部0条评论

快来发表一下你的评论吧 !
