

无人机马达太重,大牛做了个PCB电动机
电子说
描述
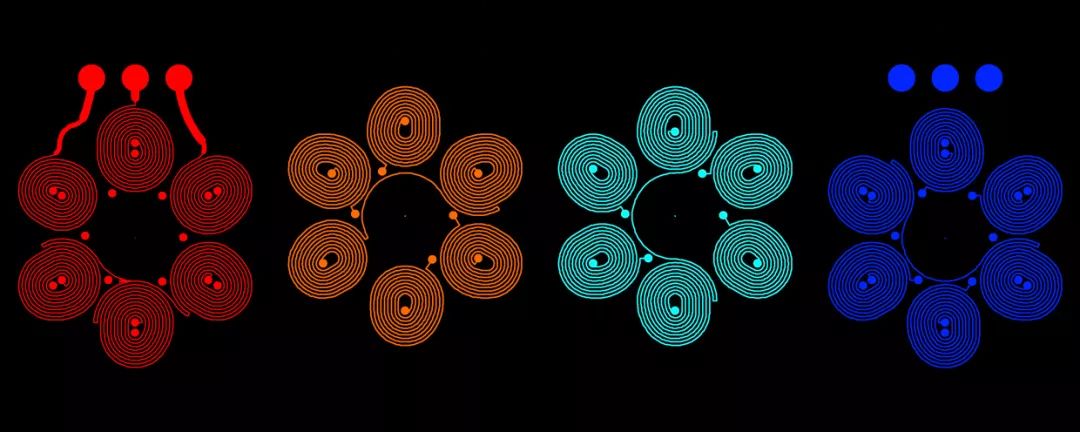
电动机印制电路板的每一层都有一组线圈,它们堆叠在一起并互相连接以形成连续的迹线。
我一开始只是想做一架非常小的无人机。但我很快意识到,在我的设计中,有一个制约因素,那就是马达的体积和重量。即使是小电动机也仍然是分立的装置,需要连接到所有其他电子元件和结构元件上去。所以我开始想知道是否有办法合并这些元件并减轻一些质量。
我的灵感来自于一些无线电系统如何使用由印制电路板(PCB)上的铜迹线制成的天线。我可以使用类似的东西来制造足够强大的磁场来驱动电动机吗?我决定看看是否可以使用由PCB迹线制成的电磁线圈来制造轴向磁通电动机。在轴向磁通电动机中,形成电动机定子的电磁线圈平行于圆盘形转子安装。永磁体嵌入转子的圆盘中。用交流电驱动定子线圈使转子旋转。
第一个挑战是确保我能够创造出足够的磁通量来转动转子。设计一个扁平的螺旋线圈迹线并让电流流过它是很简单的,但是我将我的电动机的直径限制在16毫米,以使整个电动机的直径可与最小的成品无刷电动机的相媲美。16毫米意味着我只能在转子圆盘的下面总共安装6个线圈,每个螺旋上安装大约10匝。十匝不足以产生足够大的磁场,但是如今很容易制作出多层的PCB。通过打印成堆叠的线圈(四层的每一层上都有线圈),我可以让每一线圈获得40匝,足以转动一个转子。
随着设计的向前推进,一个更大的问题出现了。为了保持电动机的旋转,必须使转子和定子之间动态变化的磁场同步。在由交流电驱动的典型电动机中,由于桥接起定子和转子的电刷的排列,这种同步自然就产生了。在无刷电动机中,需要的是实现反馈系统的控制电路。

左图:完成的四层印制电路板。
中图:对这些线圈施加脉冲,驱动3D打印出来的带有嵌入式永磁体的转子。
右图:虽然没有传统的无刷电动机那么强大,但PCB更便宜、更轻。
在我以前制造的一个无刷电动机驱动器中,我测量了作为反馈来控制速度的反电动势。反电动势产生的原因是旋转的电动机就像一个小发电机,在定子线圈中产生与用于驱动电动机的电压相反的电压。对反电动势进行感应,可以提供有关转子旋转方式的反馈信息,并让控制电路使线圈同步。但在我的PCB电动机中,反电动势太弱而无法使用。为此,我安装了霍尔效应传感器,它可以直接测量磁场的变化以测量转子及其永磁体在传感器上方旋转的速度。随后这些信息被输入到电动机控制电路中。
为了制造转子本身,我转向了3D打印。起初,我制作了一个转子,我安装在一个单独的金属轴上,但后来我开始将卡扣轴作为转子的一个组成部分进行打印。这将物理组件简化为了只有转子、四个永磁体、一个轴承以及提供线圈和结构支撑的PCB。
我很快就得到了我的第一台电动机。测试表明它能产生0.9克厘米的静态扭矩。这不足以满足我最初的制造一个集成进无人机的电动机的目标,但我意识到这个电动机仍然可以用来推动小型廉价的机器人轮子上用轮子沿着地面前进,所以我坚持进行研究(电动机通常是机器人身上最昂贵的部件之一)。这一印制电动机可以在3.5到7伏的电压下工作,尽管它在较高的电压下会明显升温。在5 V时,其工作温度为70°C,这仍然是可控的。它吸收大约250毫安电流。
目前,我一直在努力增加电动机的扭矩。通过在定子线圈的背面添加铁氧体片来包含线圈的磁场线,我几乎可以使扭矩倍增。我还在研究设计具有不同绕组配置和更多定子线圈的其他原型。此外,我一直在努力使用相同的技术来构建一个PCB电动推杆,它可以驱动一个3d打印出来的滑块在一排12个线圈上滑动。而且,我正在测试一个柔性PCB原型,它使用相同的印制线圈来执行电磁驱动。我的目标是——即使我还不能制造出能飞上天空的小无人机——开始制造具有比现有机器人更小更简单的机械构造的机器人。
审核编辑 :李倩
-
【我的无人机起飞了】这样学习无人机,我才真的彻底懂了2017-11-19 7285
-
无人机基本知识大攻略2018-10-12 3946
-
你知道你的车有多少个电动机吗2019-03-04 2371
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3875
-
无人机云台电机是什么电机?2021-05-25 4398
-
无人机云台是什么2021-09-01 10645
-
制作无人机的小型PCB2022-08-01 2142
-
汽车中的电动机应用2022-11-11 915
-
无人机动力系统组成2016-08-09 7875
-
使用一次性餐盘和四个马达制作无人机2019-05-24 7700
-
小型电动无人机的总体参数设计方法研究说明2021-02-01 1605
-
音圈马达无人机助力城市管理2021-09-15 851
-
如何制作一个PCB电动机2021-09-26 7224
-
音圈马达加持的大型民用无人机2022-01-09 1528
-
音圈马达助力的无人机亮相无人机大会2023-06-12 1281
全部0条评论

快来发表一下你的评论吧 !
