

如何使用波形分集雷达抑制风力涡轮机干扰
RF/无线
描述
风力涡轮机扩散产生的干扰正在成为地面中高脉冲重复频率(PRF)脉冲多普勒空中监视雷达的一个问题。本文表明,将发射波形的某些参数从一个脉冲随机化到另一个脉冲,可以设计一个滤波器来抑制风力涡轮机干扰和地面杂波。此外,单个相干处理间隔(CPI)足以进行明确的范围测量。因此,范围消歧不需要多个 CPI,就像交错 PRF 技术一样。首先,我们考虑具有固定PRF但应用于每个发射脉冲的不同(随机)初始相位的波形。其次,我们考虑具有不同(随机)PRF的波形。通过仿真和实验数据分析验证了理论结果。单个CPI中的杂波加干扰抑制和范围消歧可能对联邦航空管理局和沿海雷达具有吸引力。
第一节 简介
风力发电供应超过4.5美元,今天的美国电力组合。风能是一种全国范围内负担得起的自然资源,可在陆地和 近海;它是可再生的,具有健康和环境效益,因为它减少了空气污染的排放和水 消费,并且由于支持国内供应链,因此还具有社会和经济效益。它被设想 该风力发电将提供 10% 到2020年全国最终用途电力需求,另一方面,风电场给空中监控带来了挑战 雷达。
风力发电产生的能量与扫掠面积和风速成正比。有了这些考虑 考虑到,效率更高的风力发电场倾向于采用更大的叶片转子和更高的涡轮机塔架。风 涡轮旋转叶片会产生干扰,表现为两者的广谱多普勒频移 直接路径和多路径离开地面。地面反弹不会改变干扰多普勒频率,但 可能会改变其功率谱。这些影响会对脉冲多普勒空中/地面监视产生重大影响 雷达,例如空中交通管制 (ATC) 雷达,导致目标信噪比 (SNR) 损失和降低 检测概率,更高的误报率,以及丢失的踪迹。关于如何减轻整个变化对附近雷达的影响已经有很多研究 在雷达信号处理中。上述论文中提出的技术涉及修改 在探测器阶段区分真实目标和风力涡轮机干扰。。
在本文中提出了在发送端使用波形分集,在接收端使用相干处理。用于机载目标监视的地面雷达,以解决距离模糊并压制地面 杂乱,以及风力涡轮机的干扰。
传统上,脉冲多普勒雷达在相干处理间隔(CPI)内收集多个脉冲,使用 固定波形和脉冲重复频率 (PRF)。需要中高PRF来明确测量 机载目标径向速度,但距离测量变得模糊不清。要解决范围歧义,多个 不同的PRF需要CPI [8]。范围模糊性中的目标,没有 当所有范围模糊折叠成一个区间时,很难检测到风力涡轮机干扰,因为 如图 1 所示。
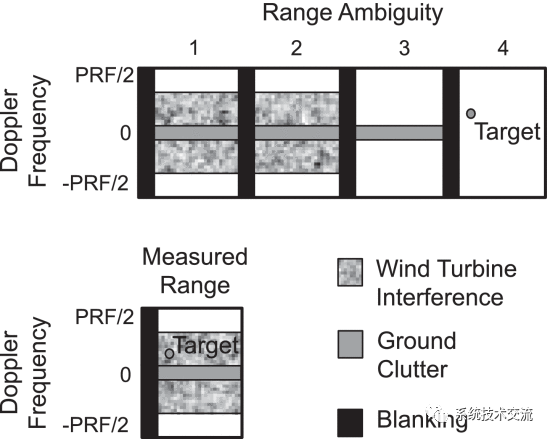
距离-多普勒空间显示由于选择PRF而出现的四个模糊区域。目标位于 第四个区域。当使用常规雷达信号处理时,目标、地面杂波和风 涡轮机干扰折叠到单个测量范围区域。
显示全部
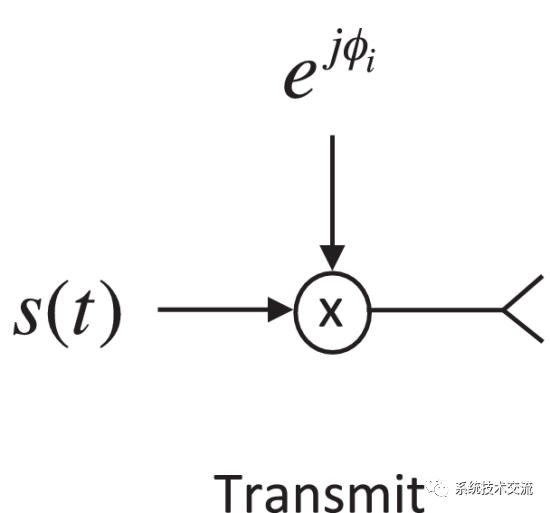
如图2所示,施加到每个脉冲的随机发射初始相位可以设计出一种滤波器,该滤波器可以抑制地面杂波并明确测量空中目标 使用单个 CPI [9] 的范围。本文扩展了[9]中的工作,包括对风力涡轮机干扰的抑制,它沿着 随着地面杂乱,可能是范围模糊的。范围模糊度可以通过处理单个唯一确定 CPI,对每个范围模糊性应用适当的多普勒滤波器。目标检测可在任何地方进行 图1中上图的空白区域。请注意,还可以检测 非常慢(甚至零径向速度)的机载目标超出地面杂波地平线。每个停留可能有两个 CPI 仍然需要,因为接收器在脉冲传输过程中消隐。此外,对于相同的停留 传统雷达的时间,这两个CPI中的每一个都可以处理更多的脉冲,从而改善 由于信噪比增加而进行检测。本文使用目标概率评估算法性能 检测信干加噪声比 (SINR) 损耗,多普勒滤光片模式。
显示全部
还可以通过随机化脉冲来执行明确的距离测量和地面杂波抑制 重复间隔 .这种方法的优点是在传输过程中不会通过消隐来持续遮挡目标,因此使用 单一消费物价指数。在本文中,我们将随机PRI的使用扩展到存在风力涡轮机干扰的情况。
A. 在风力涡轮机干扰存在下的其他技术综述
已经开发了几种不同的方法来抑制几类风力涡轮机的干扰 监视雷达,用于区分目标和风力涡轮机 干扰,一般在检测阶段。在中,风力涡轮机 通过在预检测、检测和 检测后阶段。这些技术包括使用两个通道进行高程判别(预检测),一个 增强恒定误报率(CFAR)探测器和增强运动目标检测器(MTD)算法(检测), 以及改进的跟踪和分类算法(后检测)。在 CFAR 检测器中,计算阈值 将电池中显示极大功率的回波替换为平均噪声功率后。增强的 MTD算法在每个单独的多普勒滤波器中使用自适应杂波图来抑制风力涡轮机的干扰。动态杂波图的估计也在ATC雷达的中提出。提出了一种用于干扰抑制的信号分解方法,其中雷达信号被分解为振荡分量的叠加(移动目标具有 傅里叶变换域中的稀疏表示)和瞬态分量(风力涡轮机干扰) 在短时傅里叶变换域中具有稀疏表示)。目标和干扰组件为 通过 L1 范数最小化进行估算 非线性成本函数的问题,使用迭代数值算法求解。
为气象雷达提出的另一种方法试图识别受污染的风力涡轮机干扰 距离-多普勒光谱或距离-方位角-多普勒光谱中的细胞,用于重建 天气信号,使用插值 或回归 技术。相控阵和最小方差无失真响应中提出了多普勒天气干扰抑制的方法 雷达。
第二节.具有相位分集的固定地面雷达
考虑一个固定的地面雷达,由于选择PRF,其范围模糊。本文采用 以下表示法约定:非粗体字母表示标量,粗体小写字母表示向量,以及 粗体大写
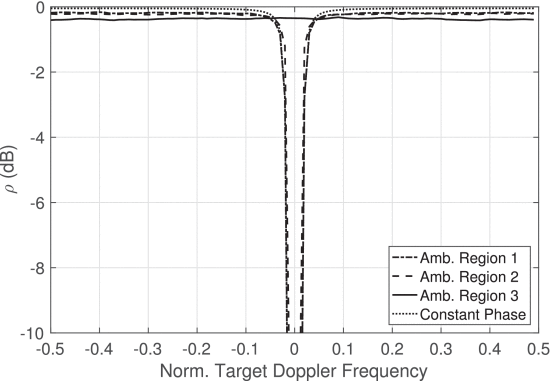
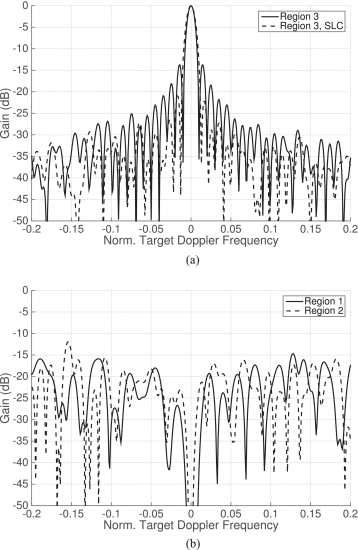
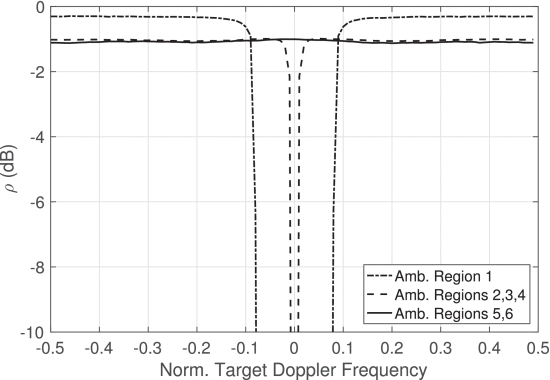
图3显示了相对于随机相序的平均值。此下限表示最坏情况,作为 目标归一化多普勒频率,对于每个范围模糊。请注意,静止目标(或零径向速度) 在第三个范围内,模糊的损失最小,因为该区域没有地面杂波。这是一个独特的 相干相位分集雷达的特性,能够解决距离模糊,从而分离 目标来自位于不同歧义中的混乱。还显示了恒定相位脉冲多普勒雷达的第三个模糊中的 SINR 损耗,类似于前两个歧义中相位分集雷达的损耗,其中杂波是 目前。出于比较目的,恒相雷达处理所有脉冲,包括杂波填充脉冲。在 第三种模糊性和对于杂波区域之外的多普勒频率,相位分集的性能 雷达仅比恒相雷达的性能低几分贝。
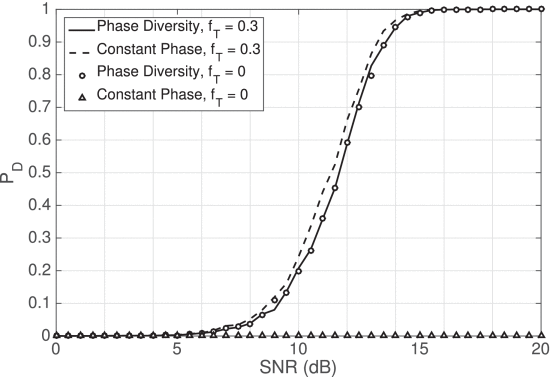
相位分集雷达的检测概率如图4所示,与定义的目标信噪比的函数关系一致 具有恒定相位雷达的检测概率。 在第一种情况下,目标多普勒频率在杂波区域之外,允许 用于来自恒相雷达的检测,否则将无法在杂乱中检测到目标。这 第二个示例表示只有相分集方法才能进行检测的情况。杂乱无章 区域,相位分集雷达相对于恒相雷达需要略高的信噪比,以便 实现相同的检测概率。该结果与图3所示的结果一致,显示相位分集雷达的信噪比损耗 仅比恒相雷达的 SINR 损耗低几分之一 dB。这种最小的损失是要支付的惩罚 解决距离模糊问题,并允许在模糊性中以零多普勒频率进行检测,而不会产生混乱, 还比较了随机相位和恒定相位雷达的检测概率,结果表明随机相位雷达相对于 恒相位雷达。杂波模糊的数量更大,并且杂波填充脉冲被丢弃。但是,我们无法 使用相同的参数值复制 中的结果。
显示全部
显示全部
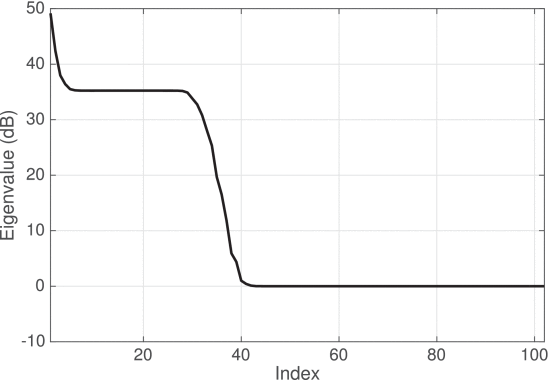
图7显示了相分集雷达和信噪比在三个模糊区域中的信噪比损耗。恒相雷达第三区域的损耗。恒相雷达的性能在所有方面都是相似的 歧义区域,因此为了清楚起见,它仅在第三个区域中显示。相位分集雷达在第二个和 第三个区域是由以下事实引起的:这些模糊性中的信号在干扰中具有更大的成分子空间,相对于第一个模糊性中的信号。事实上,如果我们使用 特征值比噪声功率高 2 dB 的特征向量,我们计算信号的功率 投影到干扰扰动上。
能够检测低速目标的惩罚是检测损失的概率,相对于 恒相雷达用于杂波多普勒扩散之外的目标。在本例中,需要 大约 2 dB 的额外目标 SNR 以获得与恒相雷达相同的探测概率, 对于杂波多普勒扩散之外的目标。
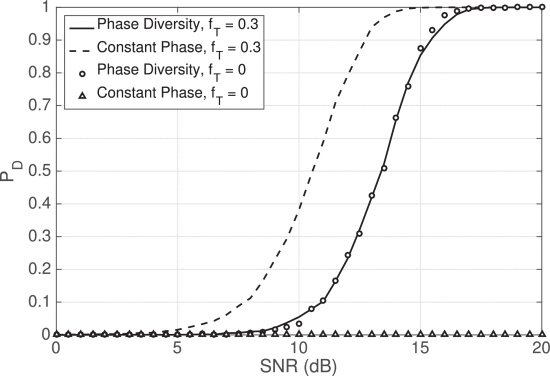
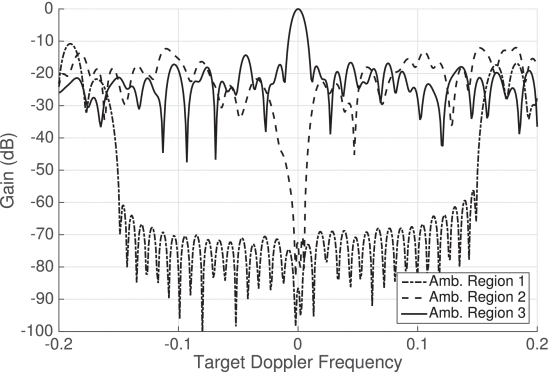
图9显示了三个模糊区域的多普勒模式,当 筛选器与目标匹配。为清楚起见,请注意,与图5中的旁瓣相比,旁瓣更高,其中仅将杂波添加到热噪声中。旁瓣较高的原因是现在更多 自由度已被用于消除干扰。
为了保持平均功率恒定,脉冲长度可以 减半。总之,增加PRF 在存在风力涡轮机干扰的情况下,即使对检测目标没有兴趣,也可能是有益的 在更高的多普勒频率下。
显示全部
B. 实验数据的结果
理论结果使用相分集和常规恒定相。有一个发光的风力涡轮机, 地面杂乱,以及与风力涡轮机不同范围内的机会目标模糊性。涡轮机有三个叶片,转子直径相等 到 82 m。最大转速为 14.4 r/min,对应于最大刀尖速度等于 61.8 m/s,最大多普勒频率等于 4 kHz。观测到的最大多普勒频率低于 4 kHz,由于叶片旋转速度较慢,或旋转平面相对于雷达的方向, 或雷达测量过程中叶片的位置,或上述原因的组合。为了更快 旋转叶片,将观察到更高的多普勒频率,并相应地设计多普勒滤波器。
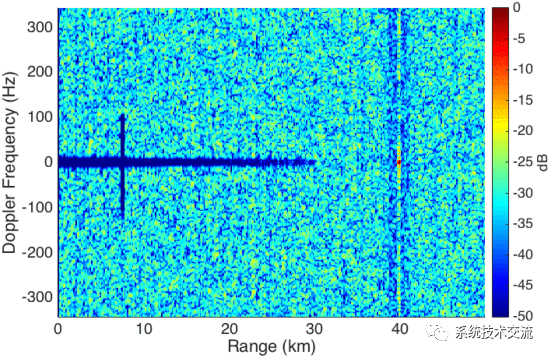
图 11 和 12 显示了 距离–分别没有相位分集和带相位分集的多普勒图像,其中dB标度归一化为热 噪声,仅显示风力涡轮机附近的范围。风力发电机组实际上处于第七个歧义 36.8 公里,但它在图 4 中在 45.11 公里的范围内折叠成第一个模糊,从而掩盖了附近的任何目标。地面杂波是 在零多普勒频率下清晰可见。图 12 显示了以下结果:相分集分别位于4.45公里和36.8公里附近。请注意,图 11 中的风力涡轮机图像与图 12(b) 中第七范围模糊中的图像非常相似。此外,图12(b)中的图像对应于杂波视界之外的范围模糊,因此没有地面杂波 目前。
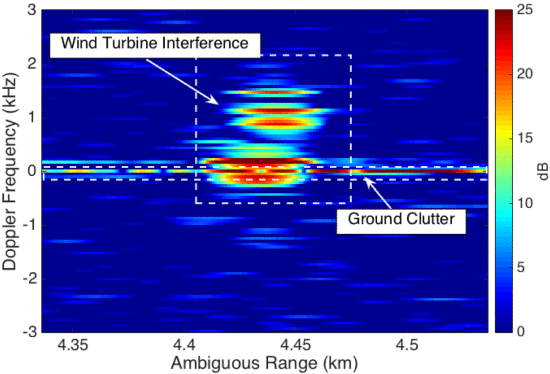
使用恒定相位波形的距离-多普勒图。地面杂波和风力涡轮机干扰是 在明确的区域中重叠。可能的利益目标被范围模糊的回报所掩盖 风力涡轮机。
显示全部
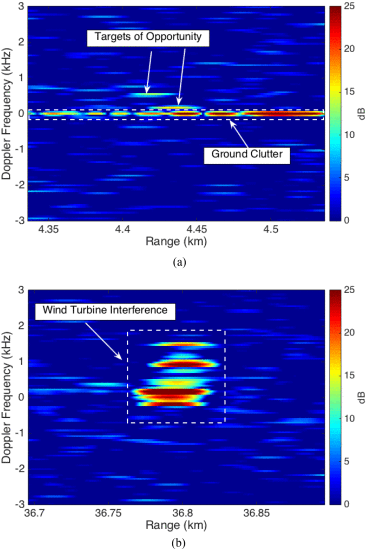
(a) 距离-多普勒图使用相位分集表示第一距离模糊,其中地面杂波和 存在两个感兴趣的目标,对于(b)第七范围模糊,其中只有风力涡轮机干扰 目前。范围测量已消除歧义。
显示全部
第三节.具有PRI分集的地面静止雷达
II和II-A部分中的相位分集方法可以推广到任意不同的发射波形,具有 不规则脉冲调制和可变 PRI。使用任意波形进行杂波抑制的通用框架 在[10]中提出。这种不同波形的适用性是 在这里扩展以抑制风力涡轮机的干扰。
任意波形具有许多优点,例如目标检测既是距离又是多普勒频率 明确且无范围多普勒频率盲区,因此可在单个 CPI 中进行监控。与传统脉冲多普勒相比,处理这些波形具有更高的计算复杂性 处理和上面讨论的相分集处理。未来的工作可能包括为开发 将提高计算效率的次优技术。
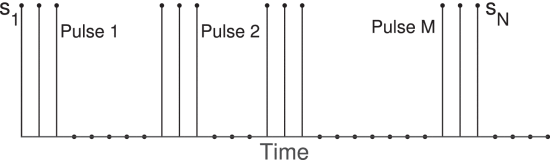
CPI中发射波形样本的模量,具有恒定的脉冲宽度和可变的PRI值。
在这里,II节和II-A节中使用的标准符号推广到任意发射波形,而以前我们 考虑由$N$规则间隔脉冲组成的传输,我们现在将处理由$N$规则间隔的样本组成的波形。为 这种多脉冲波形,传输时间的间隙由发射波形中的零值表示 向量。任意定义允许不均匀的脉冲间隔,如本例所示。当雷达不能 同时发送和接收,接收信号矢量中的许多样本在接收信号向量期间将具有零值(消隐) 传输。
当接收器关闭时,相关接收信号的某些部分将丢失, 这将导致食损失。传统的脉冲多普勒波形也会出现类似的损耗。
第四节.总结
发射波形分集使中高PRF地面雷达能够测量目标范围 明确使用单个CPI并过滤掉地面杂波和风力涡轮机干扰。这可能是 有利于避免在大量目标人群下运行的雷达出现消除歧义错误。取决于外行 风力涡轮机的下降,额外的好处是能够与附近的风电场共存。此外,没有 需要将随机相序从 CPI 更改为 CPI。虽然这里没有研究,但任何具有低电平的相序列 自相关旁瓣,例如随机双相调制,是 同等有效。相位分集雷达的性能已经过全面评估,并与 恒相雷达在风力涡轮机干扰下的性能。此外,波形分集 随机 PRI 的示例也被证明可以提供范围消歧。理论与仿真 结果已通过分析实验数据得到验证。
未来的工作可能包括推导随机相序,这些随机相序具有更好的旁瓣特性。距离-多普勒区域和可能的计算复杂性降低。进一步的改进可能是应用 知识辅助雷达技术,包括涡轮机的已知特性、风速和 环境 。 此外,相序也可以导出为动态/瞬时知识辅助的输出 优化技术。
编辑:黄飞
-
倍加福惯性测量单元在风力涡轮机的应用2024-01-19 1484
-
基于Arduino Uno的风力涡轮机MPPT调节器2022-12-21 903
-
在3D数字孪生中监测风力涡轮机的健康状况2022-10-18 1268
-
无刷滑环在风力涡轮机上的应用2022-05-30 773
-
【源码】风力涡轮机模型仿真 精选资料分享2021-07-12 1508
-
风力涡轮机可持续的能源解决方案2020-09-28 3379
-
风力涡轮机正在走向数字化2020-05-28 1894
-
欧洲96%的风力涡轮机和零部件制造厂仍在运营2020-03-30 844
-
风力涡轮机状态的无线和有线监测解决方案2019-06-26 3151
-
机舱式测风激光雷达,为风力涡轮机打造“风机之眼”2019-04-09 5963
-
风力涡轮机的工作原理2018-12-25 12947
-
新型永磁技术-怒海中的超导风力涡轮机2018-11-14 6445
-
怎么用纸板做风力涡轮机2018-09-20 5544
-
风力涡轮机和风力电场应用工业用光纤产品2016-01-06 478
全部0条评论

快来发表一下你的评论吧 !
