

三菱定位模块QD75定位控制操作步骤
工业控制
描述
以下内容来源于网络
1查找手册,定位模块与PLC CPU 输入/输出信号的列表
QD75 使用32 个输入点和32 个输出点来与PLC CPU 交换数据。以下所示的是QD75 安装在主基板的插槽0 中时的输入/输出信号。软元件X 指的是从QD75 输入到PLC CPU 的信号,软元件Y 指的是从PLC CPU 输出到QD75的信号。
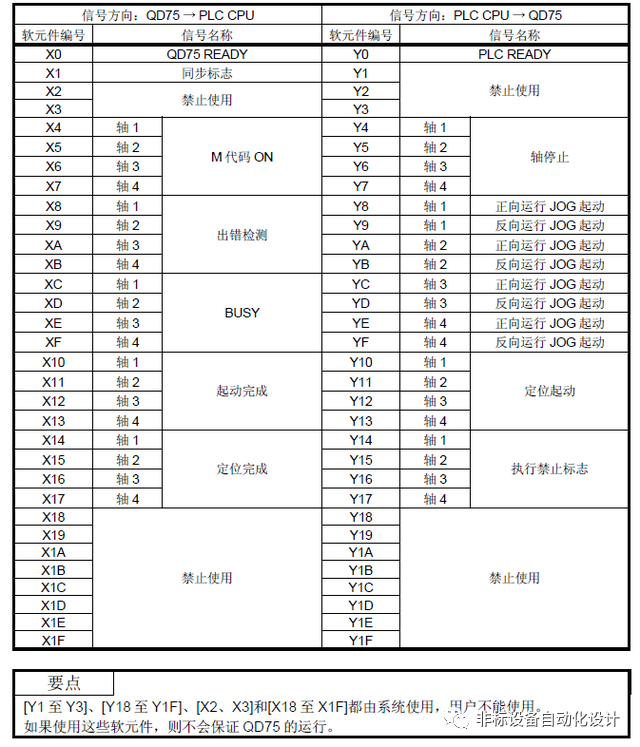
输入输出信号表
输入信号简介
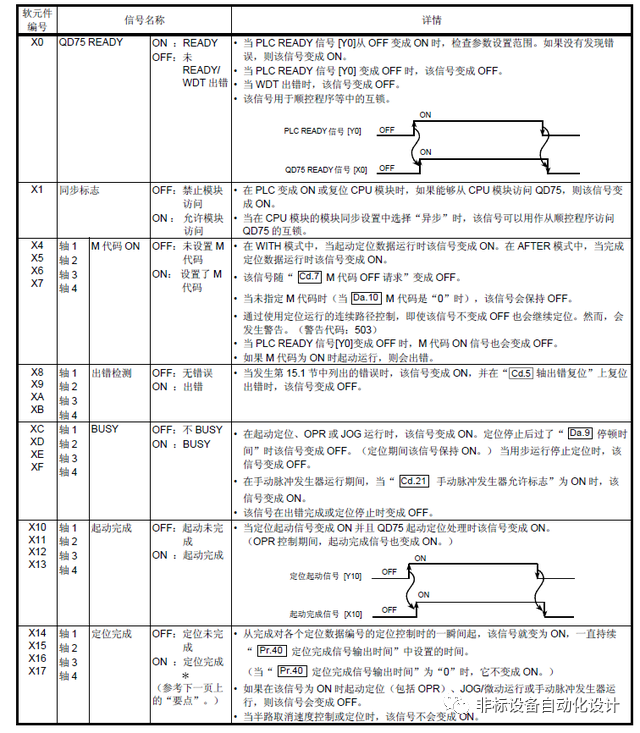
输入信号
输出信号简介
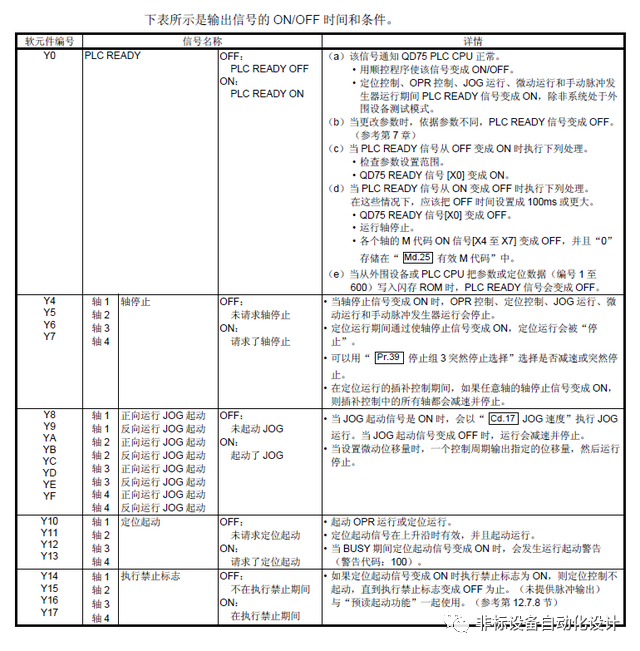
输出信号
根据图标可知道,控制定位时要使用系统ready信号,JOG启动,定位启动,定位禁止,轴BUSY,启动完成,定位完成信号。
2.QD75系统参数设置
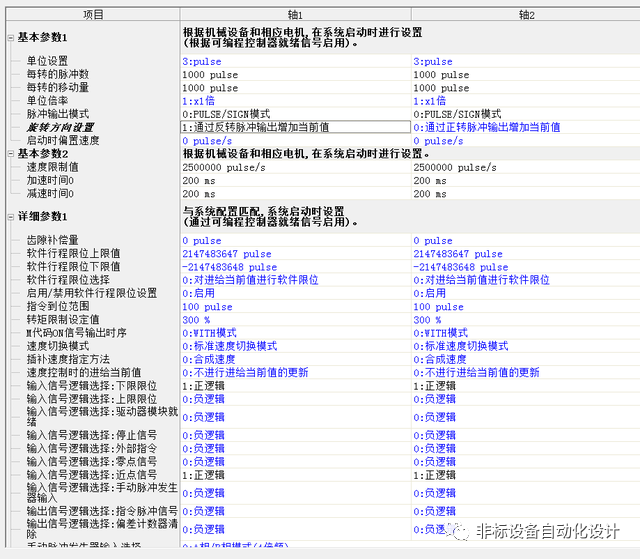
参数设置1
基本参数1,单位设置,定位的单位按照公制,英制,角度,脉冲,选择脉冲
设置每转脉冲数,电机转一圈需要多少个脉冲,设置1000
脉冲输出方式,脉冲加方向,双脉冲,A/B相,选择脉冲加方向
旋转方向,选择反转脉冲为增量
以上参数根据实际情况设置
详细参数1,根据实际情况,设置极限信号,零点信号的有效线号
根据实际情况设置是正逻辑还是负逻辑
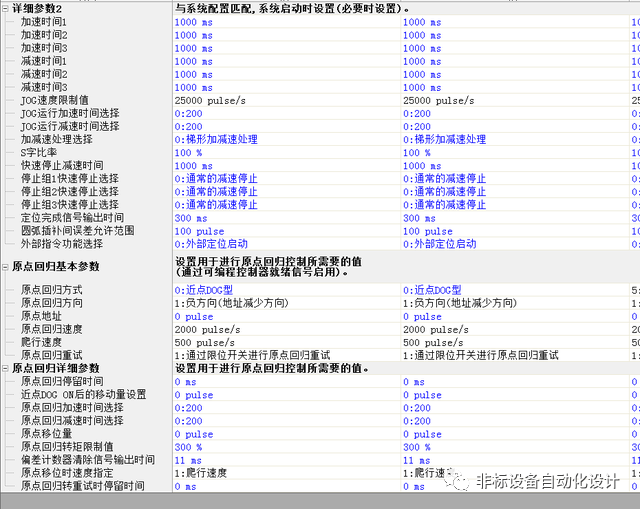
参数2
设置JOG的上限速度
原点回归参数设置,设置回归方式,选择近点DOG型
回归方向,负方向。
原点回归速度设置为2000.爬行速度设置为500
根据根据实际情况设置以上参数
根据QD75模块在主基板的位置,设置-IO地址X起始地址X40.Y起始地址Y40
3编写程序
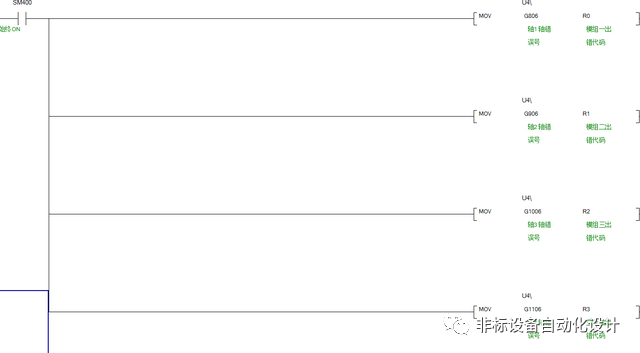
3.1轴报警错误解除
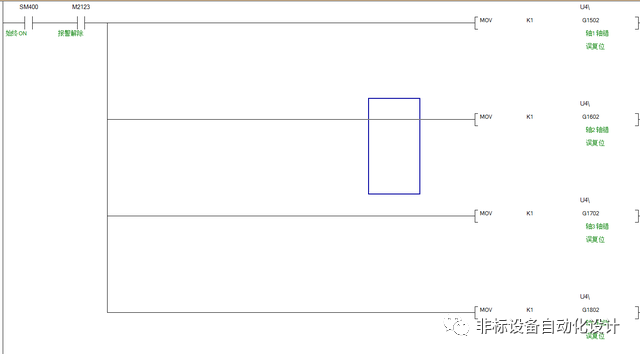
报警
3.2轴当前位置
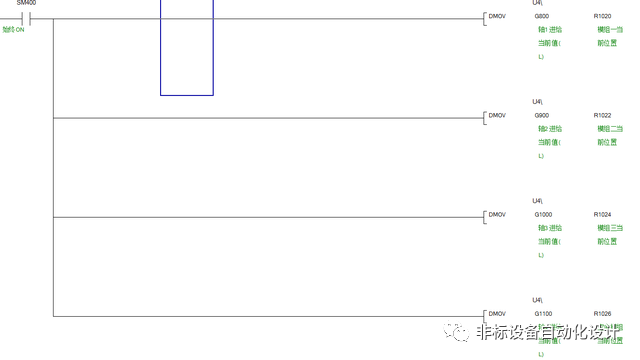
当前位置
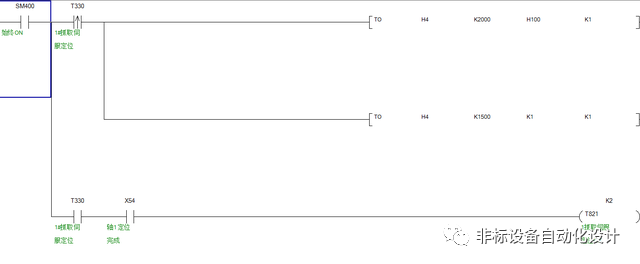
3.3轴自动定位时目标位置与运动速度
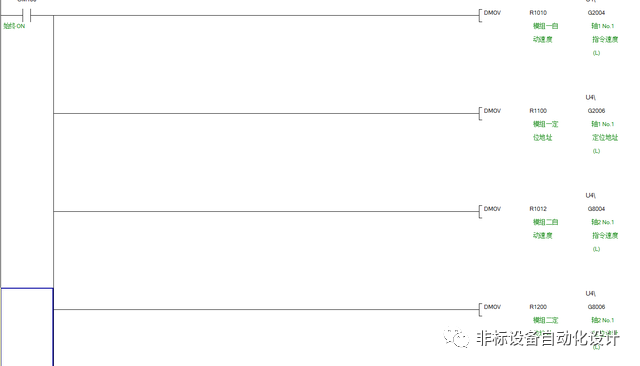
定位位置与速度
3.4手动定位速度
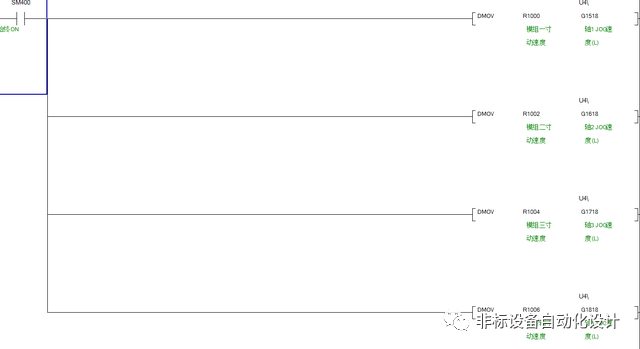
JOG速度
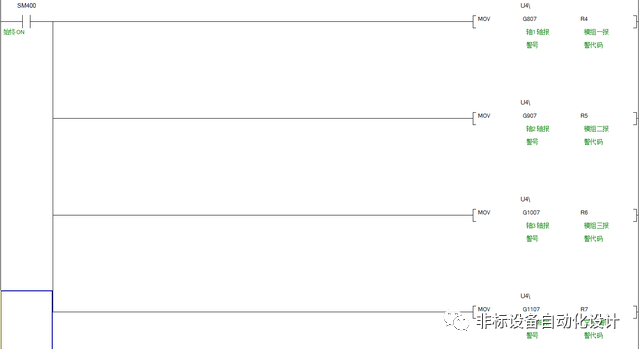
3.5轴报警错误代号
3.6轴手动JOG程序,直接输出IO信号即可
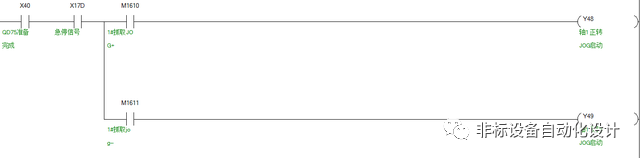
JOG程序
3.7定位程序和回原点程序
轴定位
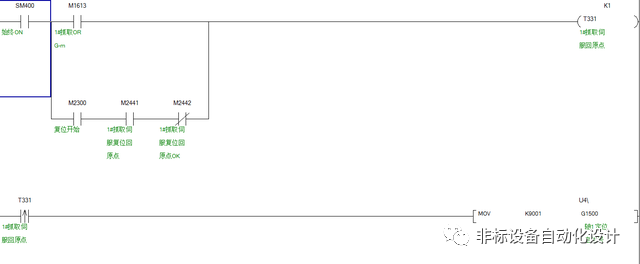
回原点
不管是定位还是回原点,向定位模块缓存区写入数据后,需要启动外部IO信号才可以启动定位,根据定位模块与PLC CPU 输入/输出信号的列表
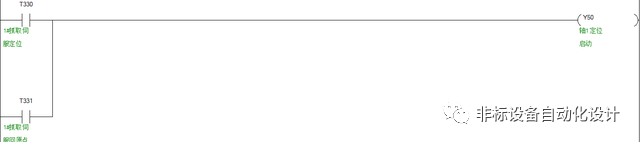
启动轴定位
3.8轴停止
当让设备暂停时,需要使轴启动信号OFF,轴停止信号ON
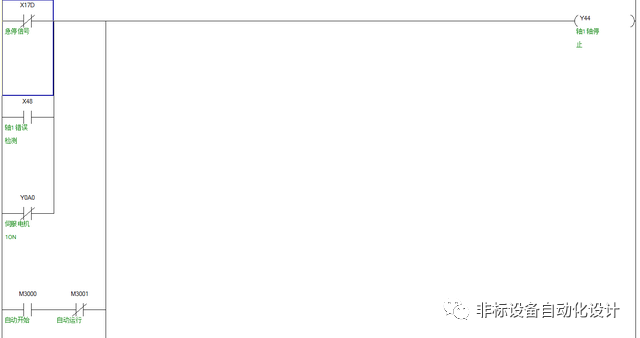
轴停止
4定位注意事项
起动时的运行
(1)当定位起动信号变成ON 时,起动完成信号和BUSY 信号变成ON,并且定位运行起动。可以看到在BUSY 为ON 时轴运行着。
(2)当定位起动信号变成OFF 时,起动完成信号也变成OFF。
如果定位起动信号甚至在定位完成后也为ON,则起动完成信号会保持ON。
(3)如果BUSY 信号为ON 时定位起动信号再次变成ON,则会发生警告“运行起动(警告代码:100)”。
(4)定位完成时进行的处理会根据下列情况(a)和(b)而有所不同。
(a)当不执行下一个定位时
如果设置停顿时间,则系统会等待经过设置的时间,然后完成定位。
当完成定位时,BUSY 信号会变成OFF 并且定位完成信号会变成ON。然而,当使用速度控制或当定位完成信号ON 时间是“0”时,信号不会变成ON。
当通过定位完成信号ON 时间时,定位完成信号会变成OFF。
(b)当要执行下一个定位时
如果设置停顿时间,则系统会等待通过设置的时间。
当经过设置的停顿时间时,会起动下一个定位。

编辑:黄飞
-
三菱QD75定位模块#硬声创作季电子学习 2022-11-15
-
三菱QD75定位启动没有脉冲输出,求大神帮忙看看程序图和定位在附件Word里2016-07-13 5709
-
三菱QD75定位启动2016-07-15 2452
-
云浮回收三菱Q系列模拟量模块回收Q系列模块QD75MH1定位模块2020-09-25 698
-
长沙上门回收三菱cpu模块,回收三菱Q系列PLC定位模块2020-11-24 1623
-
浙江本地回收Q系列模块QD75MH1定位模块 回收三菱Q系列通讯模块2021-08-09 552
-
回收Q系列模块QD75MH1定位模块 回收三菱Q系列通讯模块 QJ71C24N模块2021-08-18 762
-
三菱定位模块回收|三菱通讯模块回收|三菱伺服电机回收2021-08-28 699
-
杭州回收三菱Q系列模块 定位模块 plc扩展模块 高价回收2022-01-05 976
-
三菱Q系列PLC IO模块用户手册2008-11-21 2319
-
三菱PLC编程实例项目例程:三菱qd75定位模块程序2022-03-22 2730
-
QD75的PLC程式-现场使用OK2016-12-09 929
-
三菱PLC编程实例之例程编写的QD75D1控制三菱伺服马达2022-05-11 1545
-
三菱PLC控制伺服马达步骤介绍2023-06-25 4926
-
三菱 Q 系列 PLC学习程序分享-辊压机收放卷 PID 项目(可直接套用)2026-06-15 42
全部0条评论

快来发表一下你的评论吧 !
