

如何在RT-Thread OS环境下使用ncnn进行AI推理
描述
今天简报较短,主要演示一下如何在RT-Thread OS环境下使用ncnn进行AI推理
关于NCNN
简介
ncnn 是腾讯优图实验室首个开源项目,是一个为手机端极致优化的高性能神经网络前向计算框架。
ncnn 从设计之初深刻考虑手机端的部属和使用。无第三方依赖,跨平台,手机端 cpu 的速度快于目前所有已知的开源框架。
基于 ncnn,开发者能够将深度学习算法轻松移植到手机端高效执行,开发出人工智能 APP,将 AI 带到你的指尖。
ncnn 目前已在腾讯多款应用中使用,如 QQ,Qzone,微信,天天 P 图等。
功能概述
支持卷积神经网络,支持多输入和多分支结构,可计算部分分支
无任何第三方库依赖,不依赖 BLAS/NNPACK 等计算框架
纯 C++ 实现,跨平台,支持 android ios 等
ARM NEON 汇编级良心优化,计算速度极快
精细的内存管理和数据结构设计,内存占用极低
支持多核并行计算加速,ARM big.LITTLE cpu 调度优化
整体库体积小于 500K,并可轻松精简到小于 300K
可扩展的模型设计,支持 8bit 量化和半精度浮点存储,可导入 caffe 模型
支持直接内存零拷贝引用加载网络模型
可注册自定义层实现并扩展
恩,很强就是了,不怕被塞卷 QvQ
RT-Thread-NCNN使用说明
当前RT-Thread-NCNN工具包仅支持Arm-A核芯片,比如树莓派4B、rk3568等,我们可以在BSP包内找到相关芯片的BSP包。以下演示基于树莓派4B。
1.相关环境
硬件:树莓派4B开发板,带USB转串口调试工具;
系统:RT-Thread OS v5.0.0版本;
开发环境:Windows 10;
开发IDE:Vscode;
交叉编译工具链:gcc-arm-10.3-2021.07-mingw-w64-i686-aarch64-none-elf;
工具链下载地址:https://developer.arm.com/downloads/-/gnu-a
2.更新package工具包
相关参考:https://github.com/RT-Thread/packages
下载/进入env环境后,找到env根目录下的packages文件夹。
使用git clone https://github.com/RT-Thread/packages.git命令将最新的packages repo 克隆到本地。注:使用方法还可以参考env根目录下的readme.md文件中包管理器使用的章节,可以利用env环境中支持的包管理命令来更新本地packages文件夹。
更新完成后,查看新的软件包中./packages/ai/文件夹中是否出现ncnn文件夹,如果存在则表示软件包更新成功。
更新好的软件包如下所示:
3.准备树莓派4B项目工程
RT-Thread下载地址:https://github.com/RT-Thread/rt-thread
进入准备好的RT-Thread开发包,进入./rt-thread/bsp/raspberry-pi/raspi4-64/文件夹。在该目录下启动env,输入如下命令创建新的项目工程。
1scons --dist --project-name=xxxx
此时会在该目录下生成./dist/xxxx文件夹,该文件夹下就是新生成的树莓派4B项目工程,如下图所示:
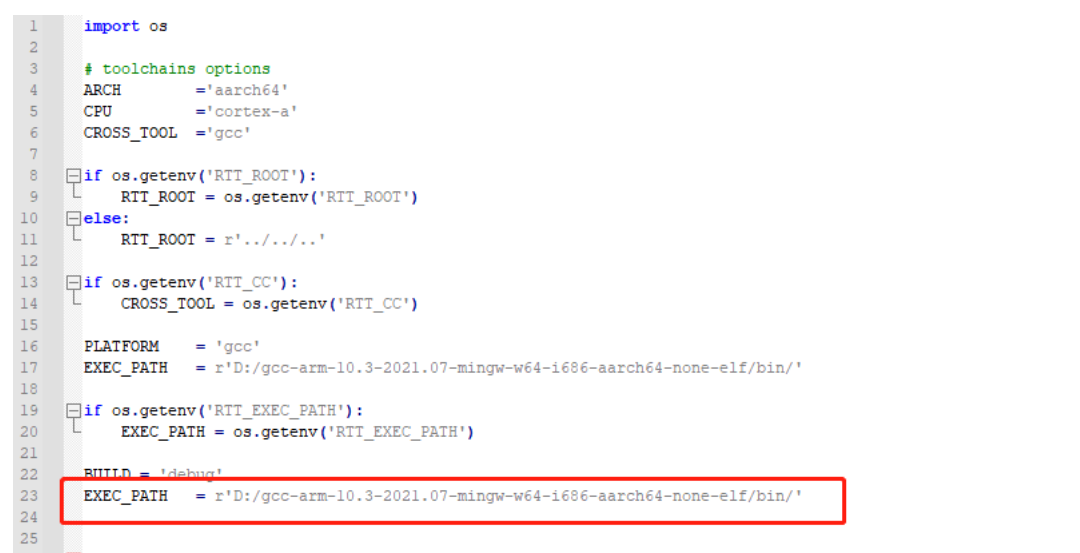
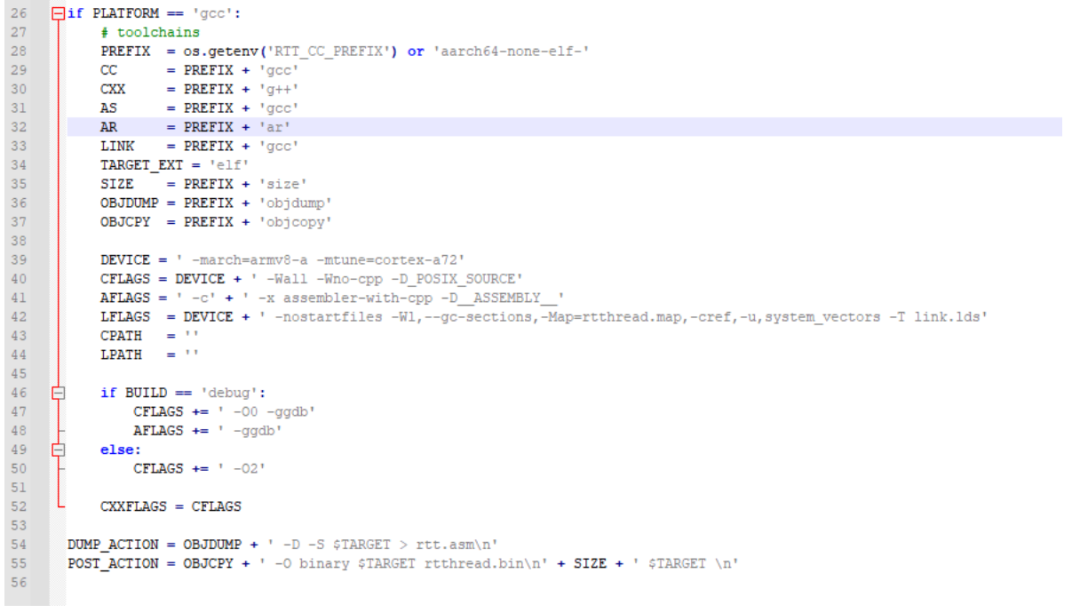
准备好项目工程后,我们将下载好的工具链放置在指定目录,然后修改上面图中rtconfig.py文件中的工具链路径。
至此,我们已经准备好了一个最基本的项目工程。然后,我们回到env工具中,使用menuconfig命令配置相关packages,这里只引入ncnn工具箱。
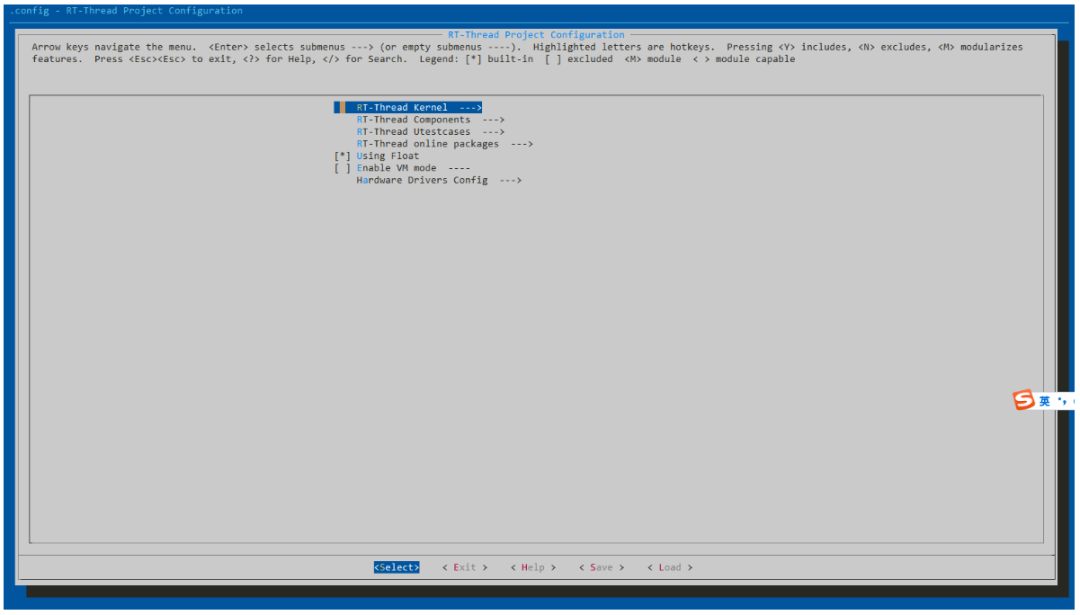
我们以此进入RT-Thread online packages、AI packages,选中ncnn package for RT-Thread,最终选中v1.0.0版本ncnn,保存并退出。
在env环境中输入下列命令,就可以把ncnn的package拉取到当前工程中。
1pkgs --update
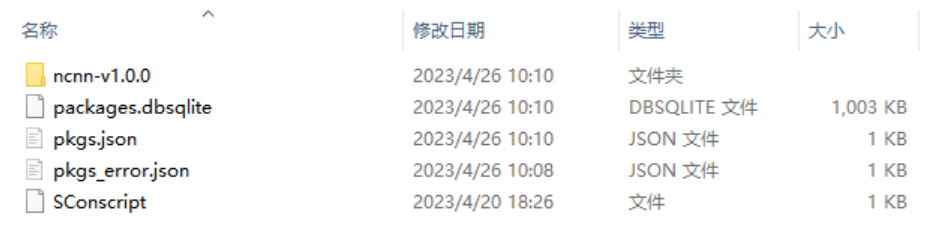
拉取好的ncnn工具包可以在项目工程中的./packages文件夹中查看到。
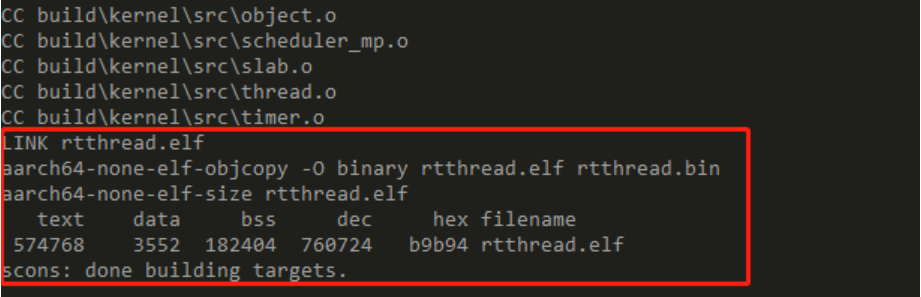
至此,我们可以尝试编译一下当前项目,不出意外,可以顺利编译。
4.编译yolov3示例
在编写代码之前,我们需要准备AI模型,可以参考NCNN官方的AI模型库。
参考链接:https://github.com/nihui/ncnn-assets/tree/master
我们以mobilev2-yolov3为例,准备一下资料到sd卡
mobilenetv2-yolov3.bin
mobilenetv2-yolov3.param
bus.jpg
其中前两个为ncnn指定的模型权重和结构,最后一个是测试图片。都准备好了,我们现在修改RT-Thread项目工程
1.修改文件:./drivers/board.h
1#define HEAP_END (KERNEL_VADDR_START + 500 * 1024 * 1024) 2#define PAGE_START HEAP_END 3#define PAGE_END ((size_t)PAGE_START + 500 * 1024 * 1024)
2.修改文件:./driver/board.c
1struct mem_desc platform_mem_desc[] = {
2 {0x00200000, (512ul << 21) - 1, 0x00200000, NORMAL_MEM},
3 {0xFC000000, 0x000100000000 - 1, 0xFC000000, DEVICE_MEM},
4};
3.修改文件:./rtconfig.h
1#define RT_MAIN_THREAD_STACK_SIZE 245760 2 3#define FINSH_THREAD_STACK_SIZE 245760
以上参数不同模型可能不同,可能需要根据模型规模去估计。
4.修改main.c文件
我们把./packages/ncnn-v1.0.0文件夹打开,里面examples有我们准备好的测试例程,其中main-yolov3.cpp就是我们用来替换main.c文件的,将其替换mian.c文件,并将mian.c改成mian.cpp文件,然后编译。
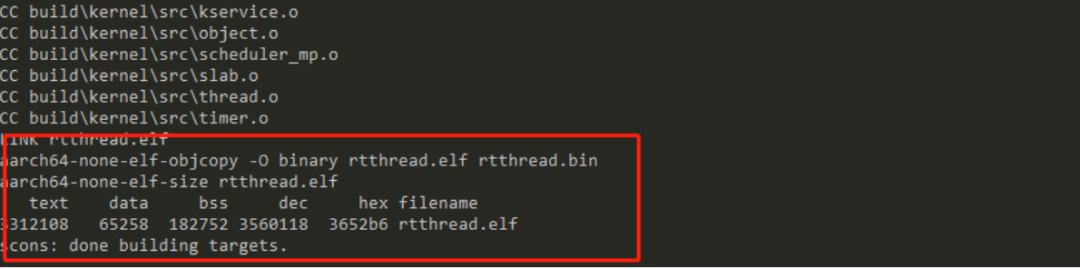
注意:我们还要确定我们项目工程已经支持了C++特性和开启了文件系统,如果没有的话还需要通过menuconfig来修改,这一部分不再赘述。
此外,关于如何在树莓派4B开发板中启动RT-Thread OS,可以参考以下文档:
启动RT-Thead OS in Pi 4B:https://github.com/RT-Thread/rt-thread/tree/master/bsp/raspberry-pi/raspi4-64
5.yolov3测试结果
串口输出结果:
1heap: 0x0056b530 - 0x1f400000 2 3 | / 4- RT - Thread Operating System 5 / | 5.0.0 build Apr 18 2023 2257 6 2006 - 2022 Copyright by RT-Thread team 7lwIP-2.1.2 initialized! 8EMMC: assuming clock rate to be 100MHz 9[I/sal.skt] Socket Abstraction Layer initialize success. 10[I/utest] utest is initialize success. 11[I/utest] total utest testcase num: (0) 12[I/DBG] version is B1 13 14[I/SDIO] SD card capacity 31178752 KB. 15found part[0], begin: 4194304, size: 256.0MB 16found part[1], begin: 272629760, size: 29.492GB 17file system initialization done! 18Helcpu 1 boot success 19cpu 2 boot success 20cpu 3 boot success 211sh /> success 22link disconnected 23Support link mode Speed 1000M 24 25msh /> 26msh /> 27msh />mn 28mnet_yolov3_test 29msh />mnet_yolov3_test 30Hello RT-Thread NCNN 3115 = 0.99720 at 48.90 389.97 159.19 x 525.88 326 = 0.96088 at 18.52 260.82 783.92 x 512.58 3315 = 0.95704 at 207.39 407.80 150.12 x 444.35
其中,最后部分输出了推理的结果。
以下是sd卡中生成的推理前后图片对比。
如果想更换测试图片,只需要将新的图片名字修改成bus.jpg就可以,这样偷懒,但是简单。
下面这个是另一个测试结果(去掉了标签)
当前问题
有部分算子当前在RT-Thread OS上运行时出错,所以如果是想自己搞一个模型跑跑,需要注意这方面问题,good luck。
后续工作
支持RISC-V架构芯片;
解决算子问题;
审核编辑:汤梓红
-
如何在RT-Thread Studio完成对RA2L1板的环境搭建以及gpio的输入输出检测?2023-09-28 4257
-
使用RT-Thread Master+QEMU模拟器进行RT-Thread原型快速开发2023-09-27 4622
-
基于RT-Thread Studio学习2023-05-15 6826
-
RT-Thread文档_RT-Thread 简介2023-02-22 1125
-
RT-Thread学习笔记 RT-Thread的架构概述2022-07-09 6454
-
RT-Thread记录(一、版本开发环境及配合CubeMX)2022-06-20 7610
-
RT-Thread大会:瑞萨e- AI成功案例及部署2022-05-27 2179
-
RT-Thread AI kit开源:轻松实现一键部署AI模型至 RT-Thread2022-01-25 1665
-
如何在RT-Thread Studio开发环境下使用nrf24L01软件包?2021-12-17 2237
-
RT-Thread零基础快速入门第0讲——环境安装2021-12-03 1218
-
RT-Thread AI kit轻松部署 STM32Cube-AI 至 RT-Thread 精选资料推荐2021-07-20 1063
-
RT-Thread编程指南2015-11-26 2372
全部0条评论

快来发表一下你的评论吧 !
