

深度学习算子优化之FFT
电子说
描述
在数字信号和数字图像领域,对频域的研究是一个重要分支。
我们日常“加工”的图像都是像素级,被称为是图像的空域数据。空域数据表征我们“可读”的细节。如果我们将同一张图像视为信号,进行频谱分析,可以得到图像的频域数据。观察下面这组图,频域图中的亮点为低频信号,代表图像的大部分能量,也就是图像的主体信息。暗点为高频信号,代表图像的边缘和噪声。从组图可以看出,Degraded Goofy 与 Goofy 相比,近似的低频信号保留住了 Goofy 的“轮廓”,而其高频信号的增加使得背景噪点更加明显。频域分析使我们可以了解图像的组成,进而做更多的抽象分析和细节处理。
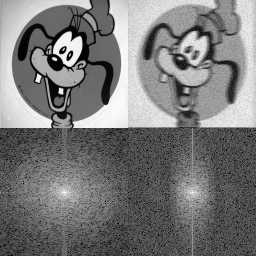
Goofy and Degraded Goofy
实现图像空域和频域转换的工具,就是傅立叶变换。由于图像数据在空间上是离散的,我们使用傅立叶变换的离散形式 DFT(Discrete Fourier Transform)及其逆变换 IDFT(Inverse Discrete Fourier Transform)。Cooley-Tuckey在DFT的基础上,开发了更快的算法 FFT(Fast Fourier Transform)。

DFT/FFT在数字图像领域还有一些延伸应用。比如基于 DFT 的 DCT(Discrete Cosine Transform,离散余弦变换)就用在了图像压缩JPEG算法和图像水印算法。
JPEG 编码是通过色彩空间转换、抽样分块、DCT 变换、量化编码实现的。其中 DCT 变换的使用将图像低频信息和高频信息区分开,在量化编码过程中压缩了少量低频信息、大量高频信息从而获得尺寸上压缩。从猫脸图上可看出随着压缩比增大画质会变差,但是主体信息还是得以保留。
图像水印算法通过 DCT 将原图转换至频域,选取合适的位置嵌入水印图像信息,并通过 IDCT 转换回原图。这样对原图像的改变较小不易察觉,且水印通过操作可以被提取。

DFT/FFT 在深度学习领域也有延伸应用。比如利用 FFT 可以降低卷积计算量的特点,FFT_Conv 算法也成为常见的深度学习卷积算法。本文我们就来探究一下频域算法的原理和优化策略。
DFT的原理及优化
公式
无论是多维的 DFT 运算,还是有基于 DFT 的 DCT/FFT_Conv, 底层的计算单元都是 DFT_1D。因此,DFT_1D 的优化是整个FFT类算子优化的基础。
DFT_1D 的计算公式: 其中 为长度为 N 的输入信号, 是 1 的 N 次根, 为长度为N 的输出信号。
该公式的矩阵形式为:
单位复根的性质
DFT_1D 中的 是 1 的单位复根。直观地看,就是将复平面划分为 N 份,根据 k * n 的值逆时针扫过复平面的圆周。

单位复根有着周期性和对称性,我们依据这两个性质可以对W矩阵做大量的简化,构成 DFT_1D 的快速算法的基础。
周期性:
对称性:
Cooley-Tuckey FFT算法
DFT_1D 的多种快速算法中,使用最频繁的是 Cooley-Tuckey FFT 算法。算法采用用分治的思想,将输入尺寸为 N 的序列,按照不同的基 radix,分解为 N/radix 个子序列,并对每个子序列再划分,直到不能再被划分为止。每一次划分都可以得到一级 stage,将所有的级自下而上组合在一起,计算得到最后的输出序列。
这里以 N = 8, radix=2 为例展示推理过程。
其中 为N=8 的序列, 为 DFT 输出序列.
根据 DFT 的计算公式:
根据奇偶项拆开,分成两个长度为 4 的序列 。

的 DFT 结果 乘以对应的旋转因子 ,进行简单的加减运算可以得到输出 。
同理, 对 也做一样的迭代, 都是 N=2 的序列,用他们的 DFT 结果进行组合运算可以得到 。
计算 N=2 的序列 , 因为 ,旋转因子 。只要进行加减运算得到结果。
用算法图形表示,每一层的计算会产生多个蝶形,因此该算法又被称为蝶形算法。
这里我们要介绍碟形网络的基本组成,对下文的分析有所帮助。

N=8 碟形算法图
N=8 的计算序列被分成了 3 级,每一级 (stage) 有一个或多个块 (section),每个块中包含了一个或者多个蝶形(butterfly) , 蝶形的计算就是 DFT 运算的 kernel。
每一个 stage 的计算顺序:
- 取输入
- 乘以转换因子
- for section_num, for butterfly_num,执行radixN_kernel
- 写入输出
看 N=8 的蝶形算法图,stage = 1 时,运算被分成了 4 个 section,每个section的 butterfly_num = 1 。stage = 2 时, section_num = 2,butterfly_num = 2。stage = 3时, section_num = 1, butterfly_num = 4。
可以观察到,从左到右过程中 section_num 不断减少, butterfly_num 不断增加,蝶形群在“变大变密”,然而每一级总的碟形次数是不变的。
实际上,对于长度为 N ,radix = r 的算法,我们可以推得到:
为当前的 ,* sec/butterfly_stride 是每个section/butterfly* 的间隔。
这个算法可以将复杂度从 O(n^2) 下降到 O(nlogn),显得高效而优雅。我们基于蝶形算法,对于不同的radix进行算法的进一步划分和优化,主要分为radix - 2 的幂次的和 radix – 非 2 的幂次两类。
radix-2 的幂次优化
DFT_1D 的 kernel 即为矩阵形式中的 矩阵,我们对 radix_2^n的 kernel 进行分析。
背景里提到, DFT 公式的矩阵形式为:
其中 ~ 为乘以旋转因子 后的输入
当 radix = 2 时,由于 , radix_2 的 DFT 矩阵形式可以写为:
当 radix = 4 时,由于 ,radix_4的DFT 矩阵形式可以写为:
同理推得到 radix_8 的 kernel 为:
我们先来看访存, 现代处理器对于计算性能的优化要优于对于访存的优化, 在计算和访存相近的场景下, 访存通常是性能瓶颈。
DFT1D 中,对于不同基底的算法 r-2/r-4/r-8, 每一个 stage 有着相等的存取量: 2 * butterfly_num * radix = 2N, 而不同的基底对应的 stage 数有着明显差异( vs vs )。
因此对于 DFT , 在不显著增加计算量的条件下, 选用较大的kernel会在访存上取得明显的优势。观察推导的 kernel 图, r-2 的 kernel 每个蝶形对应 4次访存操作和,2 次复数浮点加减运算。r-4 的 kernel 每个蝶形算法对应 8 次 load/store、8 次复数浮点加减操作(合并相同的运算),在计算量略增加的同时 stage 由 下降到 , 降低了总访存的次数, 因此会有性能的提升。r-8 的 kerne l每个蝶形对应 16 次load/store、24 次复数浮点加法和8次浮点乘法。浮点乘法的存在使得计算代价有所上升, stage由 进一步下降到 ,但由于 N 日常并不会太大, r-4 到 r-8 的stage 减少不算明显,所以优化有限
我们再来看计算的开销. 减少计算的开销通常有两种办法:减少多余的运算、并行化。
以 r-4 算法为例, kernel 部分的计算为:
- radix_4_first_stage(src, dst, sec_num, butterfly_num)
- radix_4_other_stage(src, dst, sec_num, butterfly_num)
- for Sec_num
- for butterfly_num
- raidx_4_kernel
radix4_first_stage 的数据由于 k=0, 旋转因子都为 1 ,可以省去这部分复数乘法运算,单独优化。radix4_other_stage 部分, 从第 2 个 stage 往后, butterfly_num = 4^(s-1) 都为 4 的倍数,而每个 butterfly 数组读取/存储都是间隔的。可以对最里层的循环做循环展开加向量化,实现 4 个或更多 butterfly 并行运算。循环展开和SIMD指令的使用不仅可以提高并行性, 也可以提升cacheline 利用的效率, 可以带来较大的性能提升。以SM8150(armv8) 为例,r-4 的并行优化可以达到 r2 的 1.6x 的性能。

尺寸:1 * 2048(r2c) 环境:SM8150大核
总之,对于 radix-2^n 的优化,选用合适的 radix 以减少多 stage 带来的访存开销,并且利用单位复根性质以及并行化降低计算的开销,可以带来较大的性能提升。
radix-非2的幂次优化
当输入长度 N = radix1^m1 * radix2^m2… 且 radix 都不为 2 的幂次时,如果使用 naive的O(n^2) 算法, 性能就会急剧下降。常见的解决办法对原长补 0、使用 radix_N 算法、特殊的 radix_N 算法(chirp-z transform)。补0至2的幂次方法对于大尺寸的输入要增加很多运算量和存储量, 而chirp-z transform 是用卷积计算DFT, 算法过于复杂。因此对非 2 的幂次radix-N 的优化也是必要的。
radix-N 计算流程和 radix-2 幂次一样,我们同样可以利用单位复根的周期性和对称性,对 kernel 进行计算的简化。以 radix-5 为例,radix-5 的DFT_kernel 为:
在复平面上根据x轴对称,有相同的实部和相反的虚部。根据这个性质。如下图所示,对于每一个 stage,可以合并公共项A,B,C,D,再根据公共项计算出该 stage 的输出。
这种算法减少了很多重复的运算。同时,在 stage>=2 的时候,同样对 butterfly 做循环展开加并行化,进一步减少计算的开销。
radix-5 的优化思想可以外推至 radix-N 。对于 radix_N 的每一个 stage,计算流程为:
- 取输入
- 乘以对应的转换因子
- 计算公共项, radix_N 有 N-1个公共项
- 执行并行化的 radix_N_kernel
- 写入输出
其他优化
上述两个章节描述的是 DFT_1D 的通用优化,在此基础上还可以做更细致的优化,可以参考本文引用的论文。
- 对于全实数输入的,由于输入的虚部为 0, 进行旋转因子以及radix_N_kernel 的复数运算时会有多余的运算和多余的存储, 可以利用 split r2c 算法, 视为长度为 N/2 的复数序列, 计算 DFT 结果并进行 split操作得到 N 长实数序列的结果。
- 对于 radix-2 的幂次算法, 重新计算每个 stage 的输入/输出 stride 以取消第一级的位元翻转可以进一步减少访存的开销。
- 对于 radix-N 算法, 在混合基框架下 N = radix1^m1 * radix2^m2, 合并较小的 radix 为大的 radix 以减少 stage。
DFT 延展算法的原理及优化
DCT 和FFT_conv 两个典型的基于 DFT 延展的算法,DFT_1D/2D 的优化可以很好的用在这类算法中。
DCT
DCT算法(Discrete Cosine Transform, 离散余弦变换)可以看作是 DFT 取其正弦分量并经过工业校正的算法。DFT_1D 的计算公式为:
该算法naive实现是 O(n^2) 的,而我们将其转换成 DFT_1D 算法,可以将算法复杂度降至 O(nlogn )。
基于 DFT 的 DCT 算法流程为:
- 对于 DCT 的输入序列 x[n], 创建长为 2N 的输入序列 y[n] 满足 y[n] = x[n] + x[2N-n-1], 即做一个镜像对称。
- 对输入序列 y[n] 进行 DFT 运算,得到输出序列 Y[K]。
- 由 Y[K] 计算得到原输入序列的输出 X[K] 。
我们尝试推导一下这个算法:
对 y[n] 依照 DFT 公式展开,整理展开的两项并提取公共项 , 根据欧拉公式和诱导函数,整理非公共项 。可以看出得到的结果正是 x[k] 和与 k 有关的系数的乘积。这样就可以通过先计算 得到 x[n] 的 DCT 输出 。
在理解算法的基础上,我们对 DFT_1D 的优化可以完整地应用到 DCT 上。DCT_2D 的计算过程是依次对行、列做 DCT_1D, 我们用多线程对 DCT_1D 进行并行,可以进一步优化算法。
FFT_conv
Conv 是深度学习最常见的运算,计算conv常用的方法有 IMG2COL+GEMM, Winograd, FFT_conv。三种算法都有各自的使用场景。
FFT_conv 的数学原理是时域中的循环卷积对应于其离散傅里叶变换的乘积. 如下图所示, f 和 g 的卷积等同于将 f 和 g 各自做傅立叶变幻 F,进行点乘并通过傅立叶逆变换计算后的结果。
直观的理论证明可下图。
将卷积公式和离散傅立叶变换展开, 改变积分的顺序并且替换变量, 可以证明结论。
注意这里的卷积是循环卷积, 和我们深度学习中常用的线性卷积是有区别的。利用循环卷积计算线性卷积的条件为循环卷积长度 L⩾| f |+| g |−1。因此我们要对 Feature Map 和 Kernel做zero-padding,并从最终结果中取有效的线性计算结果。
FFT_conv 算法的流程:
- 将 Feature Map 和 Kernel 都 zero-pad 到同一个尺寸,进行 DFT 转换。
- 矩阵点乘
- 将计算结果通过 IDFT 计算出结果。
该算法将卷积转换成点乘, 算法复杂度是 O(nlogn),小于卷积的 O(n^2), 在输入的尺寸比较大时可以减少运算量,适用于大 kernel 的 conv 算法。
深度学习计算中, Kernel 的尺寸要远小于 Feature Map, 因此 FFT_conv第一步的 zero-padding 会有很大的开销,参考论文2里提到可以通过对 Feature map进行分块, 分块后的 Feature Map 和 Kernel 需要 padding 到的尺寸较小,可以大幅减小这一部分的开销。优化后 fft_conv 的计算流程为:
- 合理安排缓存计算出合适的tile尺寸,对原图进行分块
- 分块后的小图和 kernel 进行 zero-padding , 并进行 DFT 运算
- 小图矩阵点乘
- 进行逆运算并组合成大图。
同时我们可以观察到,FFT_conv 的核心计算模块还是针对小图的 DFT 运算, 因此我们可以将前一章节对 DFT 的优化代入此处,辅以多线程,进一步提升 FFT_Conv 的计算效率。
-
深度学习的模型优化与调试方法2024-07-01 2966
-
深度学习编译工具链中的核心——图优化2024-05-16 2575
-
机器学习算法的5种基本算子2023-08-17 3047
-
PyTorch教程12.1之优化和深度学习2023-06-05 739
-
深度学习编译器之Layerout Transform优化2023-05-18 1681
-
智造之眼丨深度学习应用2023-05-04 1853
-
什么是深度学习中优化算法2023-02-13 2770
-
算法优化入坑难?福音来了:算子自动优化工具AutoKernel正式开源啦!2022-01-25 408
-
AutoKernel高性能算子自动优化工具2021-12-14 1515
-
深度模型中的优化与学习课件下载2021-04-07 1332
-
算法优化福音:算子自动优化工具AutoKernel正式开源啦2020-12-08 1835
-
基于动态编译(Just-in-Time)的全新深度学习框架2020-11-25 3842
-
matplotlib动态演示深度学习之tensorflow将神经网络系统自动学习散点(二次函数+noise)并优化修正并且将输出结果可视化2018-12-21 1717
-
存储深度对FFT结果的影响2009-08-25 1216
全部0条评论

快来发表一下你的评论吧 !
