

用于小型腿式机器人的仿生裂纹触觉传感器介绍
MEMS/传感技术
描述
对于腿式机器人来说,收集触觉信息对保持稳定的姿势和高效的步态至关重要。然而,用于重量不到1公斤的小型机器人的传感器 ,在耐用性、灵活性、灵敏度和尺寸方面仍然是一个挑战。仿生裂纹触觉传感器具有超灵敏、小尺寸和灵活的特性,是一款很有前途的候选传感器,但由于重复使用导致裂纹增长,进而致使传感器性能下降是一个绊脚石。
据麦姆斯咨询报道,近期,韩国亚洲大学(Ajou University)联合韩国国防发展署(Agency for Defense Development)国防工业技术中心(Defense Industry Technology Center)、美国普渡大学(Purdue University)以及韩国LIG Nex1公司的研究人员在nature期刊上发表了一篇题为“Ultra-stable and tough bioinspired crack-based tactile sensor for small legged robots”的论文,文中提出研究人员使用银纳米线(Ag-NW)网格作为止裂层,通过控制裂纹深度,开发了一款超稳定、超坚韧的仿生裂纹传感器(ULTIMAC)。
受皮肤胶原蛋白结构启发而创建的银纳米线网格有效地减缓了裂纹的扩展。该传感器非常薄、重量轻、灵敏且超耐用,在0.5%应变下,可保持20万次循环的灵敏度。研究人员通过在仿生机器人上实现触觉感知来验证传感器的可行性,并提出了基于统计和深度学习的分析方法,成功地区分了地形类型。
仿生裂纹触觉传感器,适用于小型腿式机器人
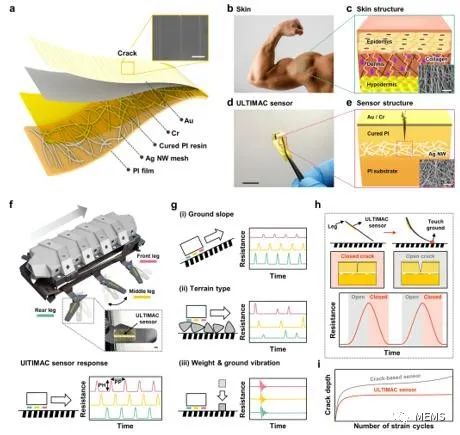
图1:仿生裂纹触觉传感器及其应用于机器人的地面传感概览
该仿生裂纹触觉传感器由四层组成:(1)导电和裂纹起始层(Au和Cr);(2)裂纹延伸层(固化聚酰亚胺(PI)树脂);(3)止裂层(Ag-NW网)和(4)支撑层(聚酰亚胺膜)(图1a)。该传感器裂纹的扫描电子显微镜(SEM)图像如图1a右上角(插图)所示。受皮肤胶原蛋白结构的启发,仿生裂纹触觉传感器嵌入了止裂层,大大提高了其耐用性。
受皮肤出色的抗撕裂特性启发,研究人员设计了该款含有银纳米线的极薄(约10 μm)且轻(约6 mg)的坚韧型传感器(图1d)。他们模拟了皮肤的胶原蛋白结构,以控制传感器中的裂缝深度并提高了其耐用性(图1e)。银纳米线通过旋涂很容易编织成网状结构,这使网状结构具备高纵横比(约3300)和高强度(约3 GPa)特性(图1e,插图)。
此外,通过分析该传感器信号的峰值高度(PH)和峰间间隔(PP),研究人员可以识别地面坡度、地形类型和地面振动等各种信息(图1g)。图1h显示了当仿生裂纹触觉传感器连接到机器人上时,金属裂纹打开和闭合的电气响应。当机器人一条腿接触地面时,产生的地面反作用力(GRF)使另一条腿偏转,裂缝变宽,传感器的电阻增加。
裂纹扩展下的疲劳行为及嵌入或不嵌入止裂层时传感器的特性
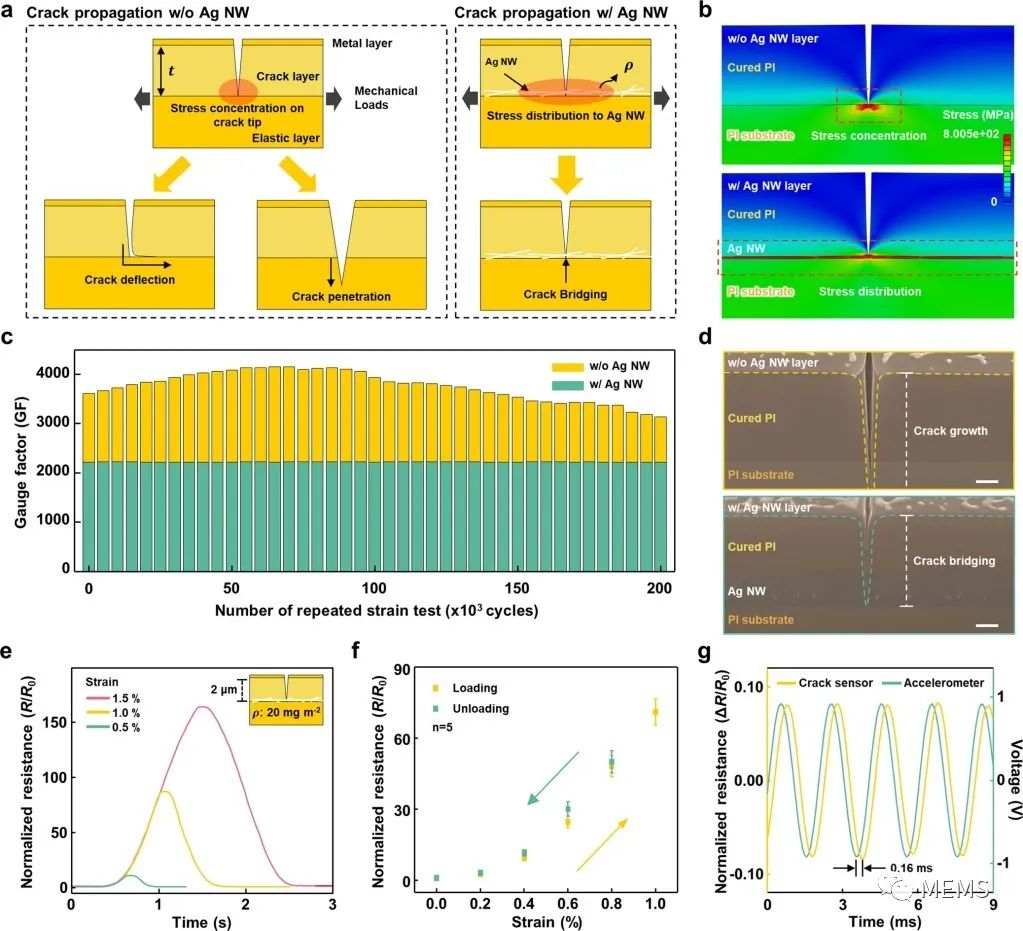
图2:裂纹扩展下的疲劳行为及嵌入或不嵌入银纳米线层时传感器的特性
图2c显示了在0.5%应变下,嵌入和不嵌入银纳米线止裂层的仿生裂纹触觉传感器在重复循环中的灵敏度变化。图2d显示了在0.5%应变下,进行20万次循环的“马拉松式”测试后,嵌入和不嵌入银纳米线层的仿生裂纹触觉传感器的SEM横截面图像。此外,通过对两种情况的进一步实验,研究人员证实了该止裂方法可以应用于其它聚合物/纳米线组合。
图2e~2g显示了该传感器在不同应变、再现性、滞后和响应时间下电阻的变化,这可能是基本特征。图2e显示了在不同最终应变下,传感器电阻的循环变化。图2f为加载到1%应变和卸载到0%应变的五个独立传感器的电阻,显示了传感器的高再现性和可忽略的滞后性。图2g为具有银纳米线层的传感器在0.16 ms内响应振动 。此外,通过在100 Hz ~ 400 Hz的频率范围内施加位移加载(0 ~ 0.1 μm),验证了传感器的高频响应特性。
仿生裂纹触觉传感器的机械和电气特性
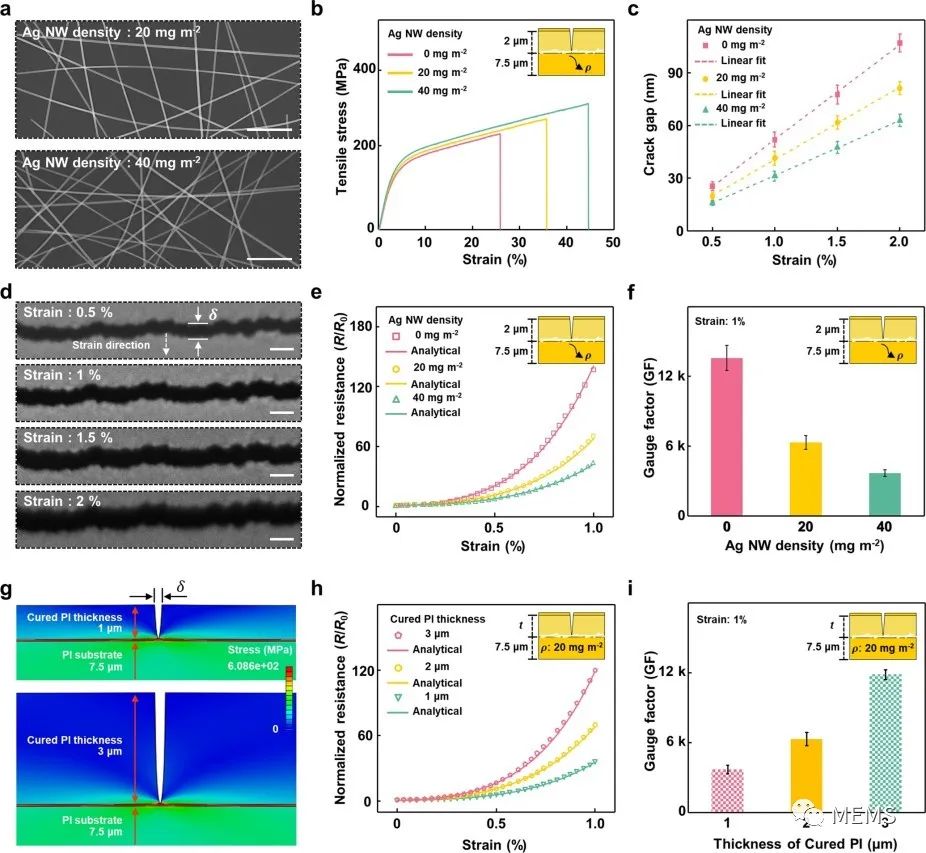
图3:具有银纳米线层的仿生裂纹触觉传感器的机械和电气特性
图3a为银纳米线渗流网格的SEM图像,该网格自旋涂覆成具有两种不同密度面的柔性连续网格。图3b显示了不同的银纳米线密度下,传感器在较高应变水平下,拉伸应力的差异。随着银纳米线层密度的增加,其拉伸强度也增加。研究人员还测量了不同密度银纳米线层的传感器韧性(拉伸应力-应变曲线上的面积),这表明在引发断裂之前每体积可以吸收的机械变形能量。该韧性比没有银纳米线层的传感器高出2.2倍(45.5 MJ/m³)。
为了评估嵌入的银纳米线层对传感器灵敏度的整体影响,研究人员根据传感器上的施加应变和银纳米线密度,通过SEM测量了与传感器电导直接相关的裂纹间隙位移(图3c、3d)。结果表明,传感器上的施加应变和裂纹间隙位移具有正线性关系,随着银纳米线密度的增加,裂纹尖端上的应力减小,裂纹间隙位移减小。同时还表明,增加银纳米线层的密度可以分散裂纹尖端的集中应力,从而提高仿生裂纹传感器的耐久性,但同时也会减少裂纹间隙的位移,从而降低传感器的灵敏度。
仿生裂纹触觉传感器的地形感知
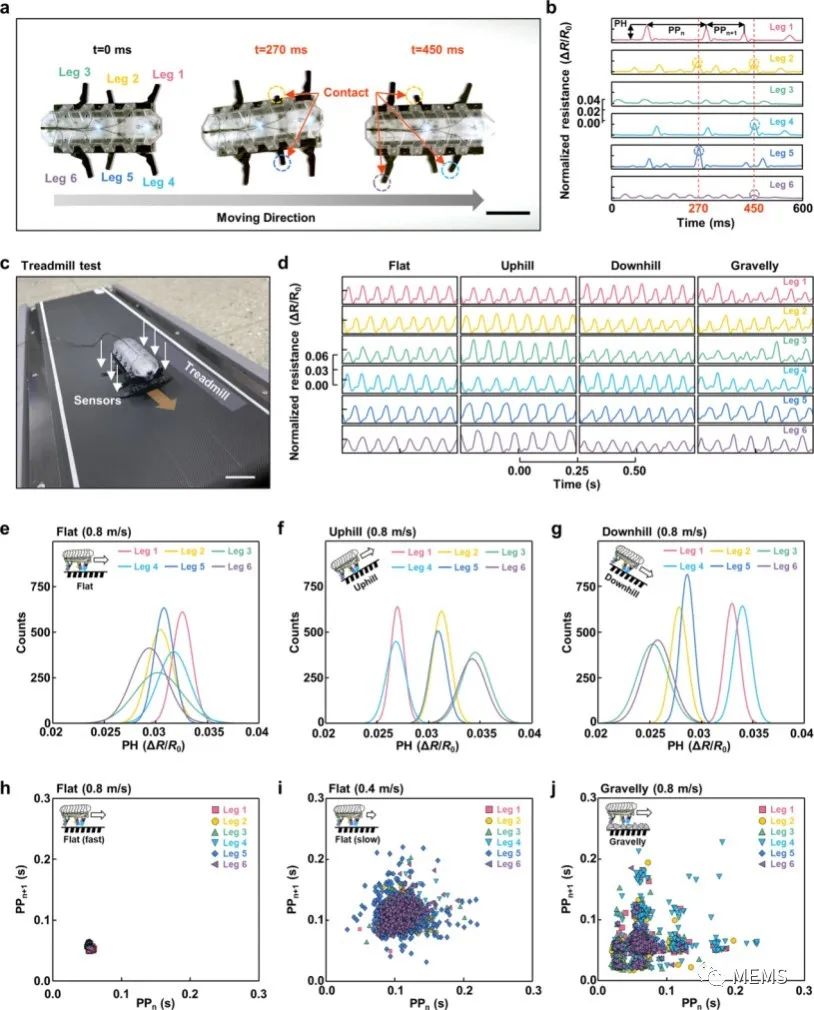
图4:在仿生腿式机器人上安装仿生裂纹触觉传感器,实现地形检测和步态分析
在测试了仿生裂纹传感器的各种性能后,研究人员将传感器连接到一个仿生腿式机器人上进行了试验。他们使机器人在跑步机上进行了长时间的跑步测试,并收集了大量传感器数据(图4c)。机器人总共在四类地形上运行:平坦、上坡、下坡和砾石路面,收集的部分传感器数据如图4d所示。研究人员使用Poincaré Plot(非线性分析的一种方法)来可视化机器人步态的整体可变性:更小、更集中的图表示步态稳定性更高,而更分散的图则表示步态不稳定。
综上所述,研究人员通过纳米裂纹深度控制的方法,开发了一款轻薄、灵活、响应快且极其敏感的,甚至高度耐用的触觉传感器。他们在该传感器中嵌入了银纳米线网格作为止裂层,以缓解指定裂纹深度下的裂纹扩展。网状结构的灵感来源于人体皮肤中的胶原纤维网,该网状物具有显著的抗撕裂性,柔韧性强。在研究人员的测试中,这种嵌入的银纳米线网格层成功地控制了裂纹的扩展,并保持了传感器整体的灵敏度,即使在0.5%应变下超过20万次循环的应变试验中也很灵敏。
他们通过实验和有限元法(FEM)模拟确定了银纳米线的密度或嵌入深度与裂纹间隙位移之间的结构变形,这成功地提高了传感器的疲劳寿命,而不会对传感器的灵敏度产生不利影响。将仿生裂纹触觉传感器集成到小型脚式机器人上,可以提供各种功能,为反馈控制提供关键信息。集成的触觉传感器可以通过在机器人运行时传输到机器人脚部的机械信号来检测机器人每一步所产生的力。该传感器还能够检测地形类型、道路坡度、施加在机器人上的静态载荷,甚至地板的振动。
审核编辑:刘清
-
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?2026-04-29 285
-
为什么说关节扭矩传感器是高端机器人的“触觉神经”?2026-04-17 905
-
仿生触觉传感器:触碰未来的科技奇迹2025-03-05 1706
-
触觉传感器的发展,对机器人产业有什么影响?2024-10-23 1977
-
工业机器人的触觉传感器有哪些?传感器作用是什么?2024-03-11 2755
-
高精度传感器如何在创造机器人的自然动作中发挥作用?2022-03-04 3000
-
机器人传感器应用2021-09-16 1876
-
机器人传感器的类别和应用原理2018-11-08 2986
-
基于ADAMS的四足仿生机器人单腿结构设计2018-03-01 1293
-
机器人传感器2018-01-03 3823
-
四足仿生机器人2016-08-19 6467
-
邯郸学舞机器人2016-03-28 3820
-
扭矩传感器实现机器人敏捷操作2015-01-21 7537
-
智能机器人对于传感器的需求2015-01-20 6808
全部0条评论

快来发表一下你的评论吧 !
