

在嵌入式中使用设计模式的思想
描述
1、嵌入式
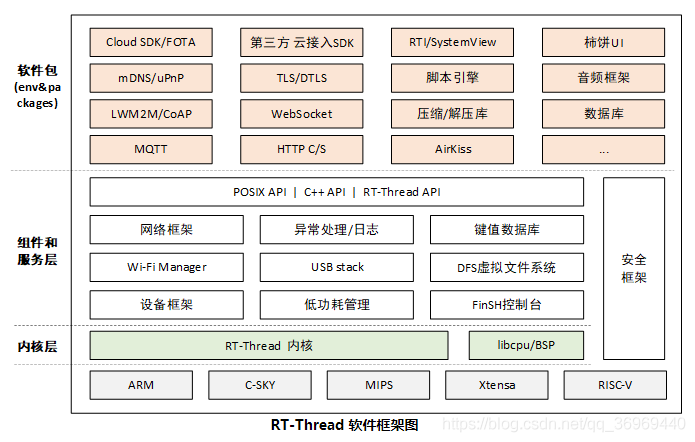
嵌入式的标签多为:低配,偏硬件,底层,资源紧张,代码多以C语言,汇编为主,代码应用逻辑简单。但随着AIOT时代的到来,局面组件改变。芯片的性能资源逐渐提升,业务逻辑也逐渐变得复杂,相对于代码的效率而言,代码的复用可移植性要求越来越高,以获得更短的项目周期 和更高的可维护性。下面是AIOT时代嵌入式设备的常见的软件框架。
设计模式
设计模式的标签:高级语言 ,高端,架构等。在AIOT时代,设计模式与嵌入式能擦出怎样的火花?设计模式可描述为:对于某类相似的问题,经过前人的不断尝试,总结出了处理此类问题的公认的有效解决办法。
嵌入式主要以C语言开发,且面向过程,而设计模式常见于高级语言(面向对象),目前市面上描述设计模式的书籍多数使用JAVA 语言,C语言能实现设计模式吗?设计模式与语言无关,它是解决问题的方法,JAVA可以实现,C语言同样可以实现。同样的,JAVA程序员会遇到需要用模式来处理的问题,C程序员也可能遇见,因此设计模式是很有必要学习的。
模式陷阱:设计模式是针对具体的某些类问题的有效解决办法,不是所有的问题都能匹配到对应的设计模式。因此,不能一味的追求设计模式,有时候简单直接的处理反而更有效。有的问题没有合适的模式,可以尽量满足一些设计原则,如开闭原则(对扩展开放,对修改关闭)
2、观察者模式
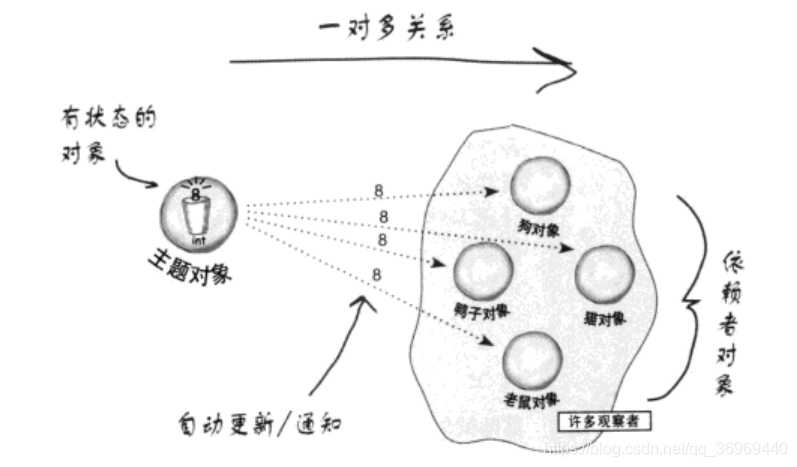
在对象之间定义一个一对多的依赖,当一个对象状态改变的时候,所有依赖的对象都会自动收到通知。
实现
主题对象提供统一的注册接口,以及注册函数 。由观察者本身实例化observer_intf 接口,然后使用注册函数,添加到对应的主题列表中,主题状态发生改变,依次通知列表中的所有对象。
struct observer_ops
{
void*(handle)(uint8_t evt);
};
struct observer_intf
{
struct observer_intf* next;
const char* name;
void* condition;
const struct observer_ops *ops;
}
int observer_register(struct topical* top , struct observer_intf* observer);
当主题状态发生改变,将通知到所有观察者,观察者本身也可以设置条件,是否选择接收通知
struct observer_intf observer_list;
void XXXX_topical_evt(uint8_t evt)
{
struct observer_intf* cur_observer = observer_list.next;
uint8_t* condition = NULL;
while(cur_observer != NULL)
{
condition = (uint8_t*)cur_observer->condition;
if(NULL == condition || (condition && *condition))
{
if(cur_observer->ops->handle){
cur_observer->ops->handle(evt);
}
}
cur_observer = cur_observer->next;
}
}
实例:嵌入式裸机低功耗框架
设备功耗分布
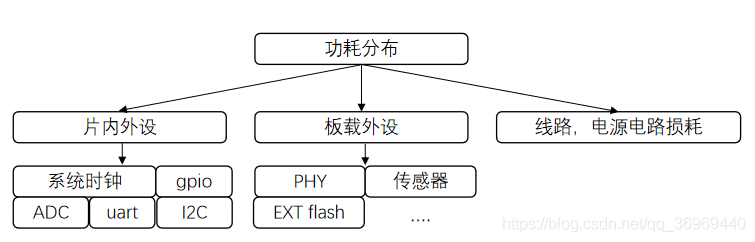
其中线路损耗,电源电路等软件无法控制,故不讨论。板载外设,如传感器可能通过某条命令配置进入低功耗模式,又或者硬件上支持控制外设电源来控制功耗。片内外设,及芯片内部的外设,通过卸载相关驱动,关闭时钟配置工作模式来控制功耗。
设备唤醒方式
当系统某个定时事件到来时,系统被主动唤醒处理事件
系统处于睡眠,被外部事件唤醒,如串口接收到一包数据,传感器检测到变化,通过引脚通知芯片
被动唤醒
主动唤醒
系统允许睡眠的条件
外设无正在收发的数据
缓存无需要处理的数据
应用层状态处于空闲(无需要处理的事件)
基于观察者模式的PM框架实现
PM组件提供的接口
struct pm
{
struct pm* next;
const char* name;
void(*init)(void);
void(*deinit(void);
void* condition;
};
static struct pm pm_list;
static uint8_t pm_num;
static uint8_t pm_status;
int pm_register(const struct pm* pm , const char* name)
{
struct pm* cur_pm = &pm_list;
while(cur_pm->next)
{
cur_pm = cur_pm->next;
}
cur_pm->next = pm;
pm->next = NULL;
pm->name = name;
pm_num++;
}
void pm_loop(void)
{
uint32_t pm_condition = 0;
struct pm* cur_pm = pm_list.next;
static uint8_t cnt;
/*check all condition*/
while(cur_pm)
{
if(cur_pm->condition){
pm_condition |= *((uint32_t*)(cur_pm->condition));
}
cur_pm = cur_pm->next;
}
if(pm_condition == 0)
{
cnt++;
if(cnt>=5)
{
pm_status = READY_SLEEP;
}
}
else
{
cnt = 0;
}
if( pm_status == READY_SLEEP)
{
cur_pm = pm_list.next;
while(cur_pm)
{
if(cur_pm->deinit){
cur_pm->deinit();
}
cur_pm = cur_pm->next;
}
pm_status = SLEEP;
ENTER_SLEEP_MODE();
}
/*sleep--->wakeup*/
if(pm_status == SLEEP)
{
pm_status = NORMAL;
cur_pm = pm_list.next;
while(cur_pm)
{
if(cur_pm->init){
cur_pm->init();
}
cur_pm = cur_pm->next;
}
}
}
外设使用PM接口
struct uart_dev
{
...
struct pm pm;
uint32_t pm_condition;
};
struct uart_dev uart1;
void hal_uart1_init(void);
void hal_uart1_deinit(void);
void uart_init(void)
{
uart1.pm.init = hal_uart1_init;
uart1.pm.deinit = hal_uart1_deinit;
uart1.pm.condition = &uart1.pm_condition;
pm_register(&uart1.pm , "uart1");
}
/*接下来串口驱动检查缓存 , 发送 , 接收是否空闲或者忙碌 , 给uart1.pm_condition赋值*/
结论
PM 电源管理可以单独形成模块,当功耗外设增加时,只需实现接口,注册即可
通过定义段导出操作,可以更加简化应用层或外设的注册逻辑
方便调试,可以很方便打印出系统当前为满足睡眠条件的模块
通过条件字段划分,应该可以实现系统部分睡眠
3、责任链模式
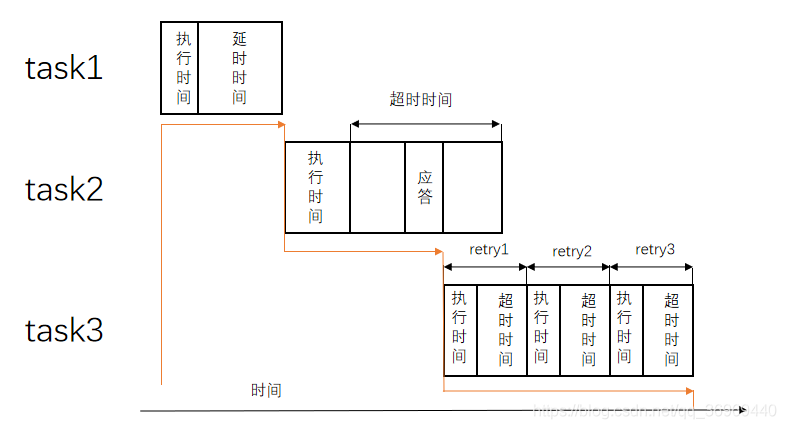
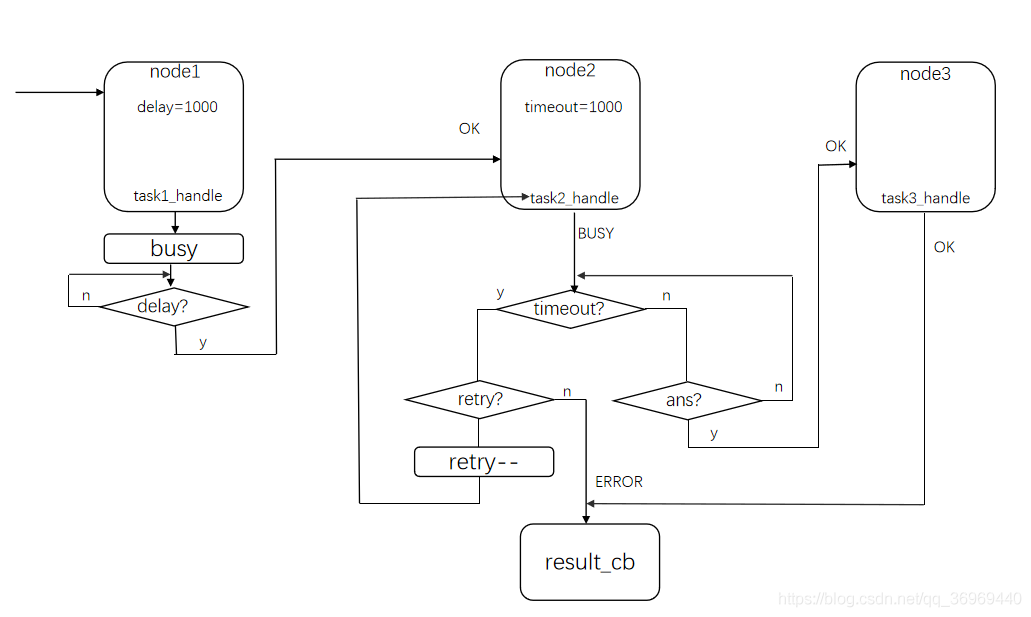
在现实生活中,一个事件(任务)需要经过多个对象处理是很常见的场景。如报销流程,公司员工报销, 首先员工整理报销单,核对报销金额,有误则继续核对整理,直到无误,将报销单递交到财务,财务部门进行核对,核对无误后,判断金额数量,若小于一定金额,则财务部门可直接审批,若金额超过范围,则报销单流传到总经理,得到批准后,整个任务才算结束。类似的情景还有很多,如配置一个WIFI模块,通过AT指令,要想模块正确连入WIFI , 需要按一定的顺序依次发送配置指令 , 如设置设置模式 ,设置 需要连接的WIFI名,密码,每发送一条配置指令,模块都将返回配置结果,而发送者需要判断结果的正确性,再选择是否发送下一条指令或者进行重传。
总结起来是,一系列任务需要严格按照时间线依次处理的顺序逻辑,如下图所示:
在存在系统的情况下,此类逻辑可以很容易的用阻塞延时来实现,实现如下:
void process_task(void)
{
task1_process();
msleep(1000);
task2_process();
mq_recv(¶m , 1000);
task3_process();
while(mq_recv(¶m , 1000) != OK)
{
if(retry)
{
task3_process();
--try;
}
}
}
在裸机的情况下,为了保证系统的实时性,无法使用阻塞延时,一般使用定时事件配合状态机来实现:
void process_task(void)
{
switch(task_state)
{
case task1:
task1_process();
set_timeout(1000);break;
case task2:
task1_process();
set_timeout(1000);break;
case task3:
task1_process();
set_timeout(1000)break;
default:break;
}
}
/*定时器超时回调*/
void timeout_cb(void)
{
if(task_state == task1)
{
task_state = task2;
process_task();
}
else //task2 and task3
{
if(retry)
{
retry--;
process_task();
}
}
}
/*任务的应答回调*/
void task_ans_cb(void* param)
{
if(task==task2)
{
task_state = task3;
process_task();
}
}
和系统实现相比,裸机的实现更加复杂,为了避免阻塞,只能通过状态和定时器来实现顺序延时的逻辑,可以看到,实现过程相当分散,对于单个任务的处理分散到了3个函数中处理,这样导致的后果是:修改,移植的不便。而实际的应用中,类似的逻辑相当多,如果按照上面的方法去实现,将会导致应用程序的强耦合。
实现
可以发现,上面的情景有以下特点:
任务按顺序执行,只有当前任务执行完了(有结论,成功或者失败)才允许执行下一个任务
前一个任务的执行结果会影响到下一个任务的执行情况
任务有一些特性,如超时时间,延时时间,重试次数
通过以上信息,我们可以抽象出这样一个模型:任务作为节点, 每一个任务节点有其属性:如超时,延时,重试,参数,处理方法,执行结果。当需要按照顺序执行一系列任务时,依次将任务节点串成一条链,启动链运行,则从任务链的第一个节点开始运行,运行的结果可以是 OK , BUSY ,ERROR 。若是OK, 表示节点已处理,从任务链中删除,ERROR 表示运行出错,任务链将停止运行,进行错误回调,可以有用户决定是否继续运行下去。BUSY表示任务链处于等待应答,或者等待延时的情况。当整条任务链上的节点都执行完,进行成功回调。
node数据结构定义
/*shadow node api type for req_chain src*/
typedef struct shadow_resp_chain_node
{
uint16_t timeout;
uint16_t duration;
uint8_t init_retry;
uint8_t param_type;
uint16_t retry;
/*used in mpool*/
struct shadow_resp_chain_node* mp_prev;
struct shadow_resp_chain_node* mp_next;
/*used resp_chain*/
struct shadow_resp_chain_node* next;
node_resp_handle_fp handle;
void* param;
}shadow_resp_chain_node_t;
node内存池
使用内存池的必要性:实际情况下,同一时间,责任链的条数,以及单条链的节点数比较有限,但种类是相当多的。比如一个支持AT指令的模块,可能支持几十条AT指令,但执行一个配置操作,可能就只会使用3-5条指令,若全部静态定义节点,将会消耗大量内存资源。因此动态分配是必要的。
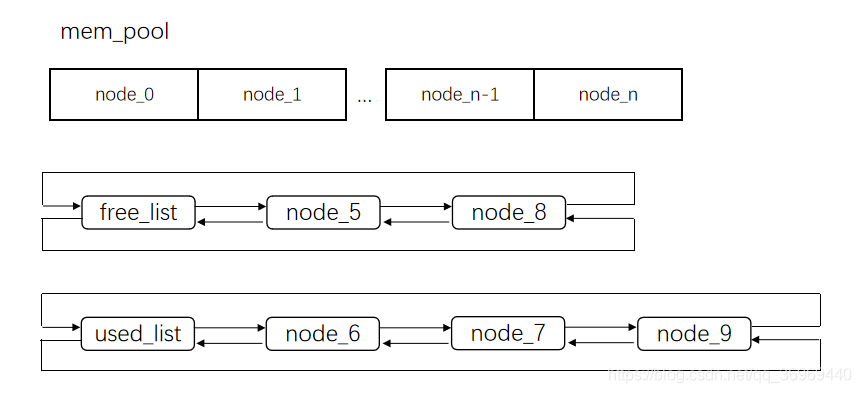
初始化node内存池,内存池内所有节点都将添加到free_list。当申请节点时,会取出第一个空闲节点,加入到used_list , 并且接入到责任链。当责任链某一个节点执行完,将会被自动回收(从责任链中删除,并从used_list中删除,然后添加到free_list)
职责链数据结构定义
typedef struct resp_chain
{
bool enable; //enble == true 责任链启动
bool is_ans; //收到应答,与void* param 共同组成应答信号
uint8_t state;
const char* name;
void* param;
TimerEvent_t timer;
bool timer_is_running;
shadow_resp_chain_node_t node; //节点链
void(*resp_done)(void* result); //执行结果回调
}resp_chain_t;
职责链初始化
void resp_chain_init(resp_chain_t* chain , const char* name ,
void(*callback)(void* result))
{
RESP_ASSERT(chain);
/*only init one time*/
resp_chain_mpool_init();
chain->enable = false;
chain->is_ans = false;
chain->resp_done = callback;
chain->name = name;
chain->state = RESP_STATUS_IDLE;
chain->node.next = NULL;
chain->param = NULL;
TimerInit(&chain->timer,NULL);
}
职责链添加节点
int resp_chain_node_add(resp_chain_t* chain ,
node_resp_handle_fp handle , void* param)
{
RESP_ASSERT(chain);
BoardDisableIrq();
shadow_resp_chain_node_t* node = chain_node_malloc();
if(node == NULL)
{
BoardEnableIrq();
RESP_LOG("node malloc error ,no free node");
return -2;
}
/*初始化节点,并加入责任链*/
shadow_resp_chain_node_t* l = &chain->node;
while(l->next != NULL)
{
l = l->next;
}
l->next = node;
node->next = NULL;
node->handle = handle;
node->param = param;
node->timeout = RESP_CHIAN_NODE_DEFAULT_TIMEOUT;
node->duration = RESP_CHIAN_NODE_DEFAULT_DURATION;
node->init_retry = RESP_CHIAN_NODE_DEFAULT_RETRY;
node->retry = (node->init_retry == 0)? 0 :(node->init_retry-1);
BoardEnableIrq();
return 0;
}
职责链的启动
void resp_chain_start(resp_chain_t* chain)
{
RESP_ASSERT(chain);
chain->enable = true;
}
职责链的应答
void resp_chain_set_ans(resp_chain_t* chain , void* param)
{
RESP_ASSERT(chain);
if(chain->enable)
{
chain->is_ans = true;
if(param != NULL)
chain->param = param;
else
{
chain->param = "NO PARAM";
}
}
}
职责链的运行
int resp_chain_run(resp_chain_t* chain)
{
RESP_ASSERT(chain);
if(chain->enable)
{
shadow_resp_chain_node_t* cur_node = chain->node.next;
/*maybe ans occur in handle,so cannot change state direct when ans comming*/
if(chain->is_ans)
{
chain->is_ans = false;
chain->state = RESP_STATUS_ANS;
}
switch(chain->state)
{
case RESP_STATUS_IDLE:
{
if(cur_node)
{
uint16_t retry = cur_node->init_retry;
if(cur_node->handle)
{
cur_node->param_type = RESP_PARAM_INPUT;
chain->state = cur_node->handle((resp_chain_node_t*)cur_node ,cur_node->param);
}
else
{
RESP_LOG("node handle is null ,goto next node");
chain->state = RESP_STATUS_OK;
}
if(retry != cur_node->init_retry)
{
cur_node->retry = cur_node->init_retry>0?(cur_node- >init_retry-1):0;
}
}
else
{
if(chain->resp_done)
{
chain->resp_done((void*)RESP_RESULT_OK);
}
chain->enable = 0;
chain->state = RESP_STATUS_IDLE;
TimerStop(&chain->timer);
chain->timer_is_running = false;
}
break;
}
case RESP_STATUS_DELAY:
{
if(chain->timer_is_running == false)
{
chain->timer_is_running = true;
TimerSetValueStart(&chain->timer , cur_node->duration);
}
if(TimerGetFlag(&chain->timer) == true)
{
chain->state = RESP_STATUS_OK;
chain->timer_is_running = false;
}
break;
}
case RESP_STATUS_BUSY:
{
/*waiting for ans or timeout*/
if(chain->timer_is_running == false)
{
chain->timer_is_running = true;
TimerSetValueStart(&chain->timer , cur_node->timeout);
}
if(TimerGetFlag(&chain->timer) == true)
{
chain->state = RESP_STATUS_TIMEOUT;
chain->timer_is_running = false;
}
break;
}
case RESP_STATUS_ANS:
{
/*already got the ans,put the param back to the request handle*/
TimerStop(&chain->timer);
chain->timer_is_running = false;
if(cur_node->handle)
{
cur_node->param_type = RESP_PARAM_ANS;
chain->state = cur_node->handle((resp_chain_node_t*)cur_node , chain->param);
}
else
{
RESP_LOG("node handle is null ,goto next node");
chain->state = RESP_STATUS_OK;
}
break;
}
case RESP_STATUS_TIMEOUT:
{
if(cur_node->retry)
{
cur_node->retry--;
/*retry to request until cnt is 0*/
chain->state = RESP_STATUS_IDLE;
}
else
{
chain->state = RESP_STATUS_ERROR;
}
break;
}
case RESP_STATUS_ERROR:
{
if(chain->resp_done)
{
chain->resp_done((void*)RESP_RESULT_ERROR);
}
chain->enable = 0;
chain->state = RESP_STATUS_IDLE;
TimerStop(&chain->timer);
chain->timer_is_running = false;
cur_node->retry = cur_node->init_retry>0?(cur_node->init_retry-1):0;
chain_node_free_all(chain);
break;
}
case RESP_STATUS_OK:
{
/*get the next node*/
cur_node->retry = cur_node->init_retry>0?(cur_node->init_retry-1):0;
chain_node_free(cur_node);
chain->node.next = chain->node.next->next;
chain->state = RESP_STATUS_IDLE;
break;
}
default:
break;
}
}
return chain->enable;
}
测试用例
定义并初始化责任链
void chain_test_init(void)
{
resp_chain_init(&test_req_chain , "test request" , test_req_callback);
}
定义运行函数,在主循环中调用
void chain_test_run(void)
{
resp_chain_run(&test_req_chain);
}
测试节点添加并启动触发函数
void chain_test_tigger(void)
{
resp_chain_node_add(&test_req_chain , node1_req ,NULL);
resp_chain_node_add(&test_req_chain , node2_req,NULL);
resp_chain_node_add(&test_req_chain , node3_req,NULL);
resp_chain_start(&test_req_chain);
}
分别实现节点请求函数
/*延时1s 后执行下一个节点*/
int node1_req(resp_chain_node_t* cfg, void* param)
{
cfg->duration = 1000;
RESP_LOG("node1 send direct request: delay :%d ms" , cfg->duration);
return RESP_STATUS_DELAY;
}
/*超时时间1S , 重传次数5次*/
int node2_req(resp_chain_node_t* cfg , void* param)
{
static uint8_t cnt;
if(param == NULL)
{
cfg->init_retry = 5;
cfg->timeout = 1000;
RESP_LOG("node2 send request max retry:%d , waiting for ans...");
return RESP_STATUS_BUSY;
}
RESP_LOG("node2 get ans: %d",(int)param);
return RESP_STATUS_OK;
}
/*非异步请求*/
int node3_req(resp_chain_node_t* cfg , void* param)
{
RESP_LOG("node4 send direct request");
return RESP_STATUS_OK;
}
void ans_callback(void* param)
{
resp_chain_set_ans(&test_req_chain , param);
}
结论
实现了裸机处理 顺序延时任务
较大程度的简化了应用程的实现,用户只需要实现响应的处理函数 , 调用接口添加,即可按时间要求执行
参数为空,表明为请求 ,否则为应答。(在某些场合,请求可能也带参数,如接下来所说的LAP协议,此时需要通过判断参数的类型)
审核编辑:刘清
-
深入了解嵌入式编程2017-10-18 4567
-
如何在嵌入式系统设计中使用UML技术2018-04-14 4787
-
嵌入式软件设计之思想与方法2018-02-24 8578
-
怎么利用分层思想进行嵌入式项目设计2020-05-22 2200
-
做嵌入式开发必须掌握的设计思想?2021-03-09 1414
-
在嵌入式设备中使用JavaScript2021-11-08 1528
-
嵌入式系统硬件抽象层的设计思想简析2022-02-11 1915
-
嵌入式系统教学模式研究2009-03-29 1940
-
基于AVR单片机的嵌入式“瘦服务器”系统设计思想2009-05-04 1105
-
在嵌入式系统中使用FPGA时的常见问题及对策2012-10-17 1446
-
如何在嵌入式Linux中使用GPIO2018-11-26 4853
-
C嵌入式编程设计模式2021-11-03 1040
-
嵌入式系统系列丛书-时间触发嵌入式系统设计模式2021-12-13 2643
-
嵌入式思想与PC思想结合2023-05-10 1464
-
如何在嵌入式中使用设计模式的思想?2023-08-09 1714
全部0条评论

快来发表一下你的评论吧 !
