

浅谈自动驾驶规控决策方面的问题和挑战
汽车电子
描述
作者简介
Dr. Liu,剑桥大学博士,是复睿微电子英国研究中心AI算法专家,常驻英国剑桥研究所。长期从事和深耕信号处理和深度学习领域,是机器人定位领域理论专家。在图神经网络,强化学习,机器人路径规划与导航领域发表了大量论文,目前从事GRUK自动驾驶规控决策领域重点前沿研发。
一、引言:
随着科技的飞速发展,自动驾驶技术逐渐走进了人们的视野。在过去的几年里,特斯拉、Waymo和Uber等公司在自动驾驶领域的投入和研发引起了广泛关注。尽管自动驾驶技术有望改变交通行业,带来诸多便利,但在其广泛应用之前,我们还需要解决许多关键问题和挑战。本文将重点关注自动驾驶规控决策方面的问题和挑战,分析当前所面临的困境,并提出一些建设性的建议与解决方向。
我们首先将深入剖析目前在制定自动驾驶规控策略过程中所面临的问题和挑战,如模型泛化、安全性可靠性、计算效率等。最后,结合国内外的先进经验与实践,我们将提出潜在的解决方向与趋势,以期为自动驾驶技术的发展和普及提供有益的参考。
通过本文的阐述,我们希望能够提高人们对自动驾驶规控决策问题和挑战的认识,促使业界加强合作与沟通,共同应对未来自动驾驶技术带来的挑战,为人类社会带来更为安全、高效、可持续的交通出行方式。
二、规控决策的重要性:
规控决策在自动驾驶领域的重要性不容忽视,因为它直接影响到自动驾驶技术实际应用的成功与否。首先,规控决策对于确保自动驾驶车辆的安全性至关重要,通过合理的规控,可以有效地降低交通事故的发生率,确保人们的生命财产安全。其次,高效的规控决策有助于提升道路通行效率,缓解交通拥堵,降低能源消耗和尾气排放,从而为实现可持续交通发展做出贡献。
此外,规控决策还需要充分考虑法规合规性,这意味着自动驾驶技术的发展必须在法律框架内进行,以确保道路安全并维护公共利益。规范的规控决策将有助于引导自动驾驶技术朝着更加合规、安全的方向发展。同时,公众对自动驾驶技术的信任度也是衡量规控决策重要性的一个关键因素。通过透明、合理的规控,可以加强公众对自动驾驶技术的信任,为其更广泛的应用奠定基础。
综上所述,规控决策在自动驾驶领域具有举足轻重的地位。它关乎自动驾驶系统的安全性、效率、法规合规性以及公众接受度,为实现自动驾驶技术的成功实施与广泛应用提供关键支持。因此,深入研究规控决策问题,寻求有效的解决方案,是推动自动驾驶技术健康发展的重要任务。
三、问题与挑战:
在接下来的文章中,我们将深入探讨当前决策规划在自动驾驶领域所面临的问题与挑战,以及相关的潜在解决方向和趋势。我们将重点关注以下几个方面:
1.模型泛化
2.不确定性估计,数据质量和数量评估
3.多智能体与智能体-环境交互
4.安全与可靠性
5.计算效率
6.利用多模态融合进行最优决策
7.可解释性和可说明性
8.无需高清地图的自动驾驶
9.与现有基础设施的集成
本篇文章将着重模型泛化、不确定性估计以及数据质量和数量评估和多智能体与智能体-环境交互这三个方面
3.1 模型泛化
自动驾驶汽车必须具备在各种环境和多样化条件下的运行能力。然而,这些环境和条件可能与用于开发决策模型的训练数据存在差异,从而导致模型的泛化能力不足,即在新的和未曾遇到的情况下表现欠佳 [1]。自动驾驶模型应具备适应不断变化的环境条件的能力,例如不同的光线、恶劣天气、突发障碍、异常交通模式、多方交通参与者以及不同的道路表面,从而实现在这些多变环境中的多智能体互动模型的泛化能力。
为确保自动驾驶汽车的安全性和可靠性,模型必须对环境变化表现出鲁棒性。反之,若对这些变化过于敏感的模型可能在泛化能力上不足,从而导致在实际驾驶场景中的表现不尽如人意。
潜在的解决方向和趋势
1.正则化和Dropout:正则化和dropout技术在深度学习领域中被广泛应用,它们可以帮助防止模型过拟合,从而提高模型的泛化能力 [3]。正则化方法主要通过在损失函数中添加惩罚项,以抑制过于复杂的模型,常见的正则化方法有L1和L2正则化。与此同时,Dropout作为另一种特殊的正则化技术,其在训练过程中通过随机丢弃一部分神经元,以减少网络中参数的共适应现象,降低模型复杂度,并增强模型对噪声和不同数据分布的适应性。这两种技术在实践中可以组合使用,共同提升深度学习模型在复杂应用场景中的稳定性和可靠性。
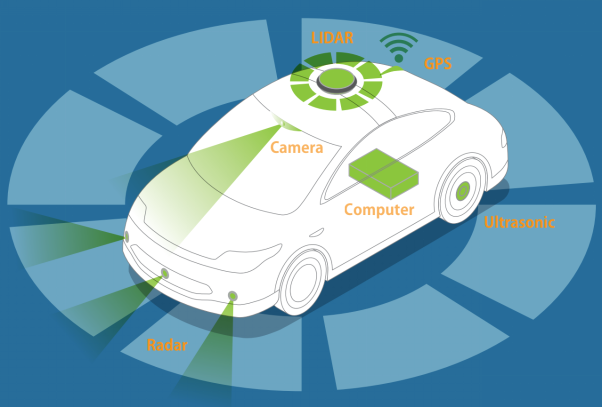
图2. 载有多传感器的车辆 [4]
2.多传感器融合:为了确保自动驾驶系统在面对各种环境变化时具有较高的鲁棒性,开发出这种能够适应复杂场景的模型至关重要。要实现这一目标,我们需要借助先进的算法处理诸如光线条件、天气以及道路表面变化等多种因素。多传感器融合技术可以有效提高系统的鲁棒性,这主要通过整合来自不同类型传感器(例如摄像头、激光雷达以及雷达)的数据实现 [5] [6]。这样一来,自动驾驶系统将具备更全面、更精确的环境感知能力,从而提高整体的安全性和性能。
3.迁移学习/元学习/域适应/域泛化:迁移学习、元学习、域适应和域泛化等技术在自动驾驶系统中发挥着重要作用。迁移学习是一种强大的机器学习方法,它通过利用预训练模型作为新模型训练的基础,从而提高模型的泛化能力 [7]。这种方法在自动驾驶领域尤为重要,因为它能够有效减少训练新模型所需的数据量,并在面对新的、未见过的数据时,提高自动驾驶系统的性能表现。元学习通过学习如何在不同任务之间迅速适应和转移知识,进一步提高了自动驾驶系统在各种情况下的泛化性能。领域适应和领域泛化则关注如何在不同驾驶环境(如城市道路、乡村道路或者不同国家的交通规则)下实现有效的知识迁移,使得自动驾驶系统具有更广泛的适用性和更高的稳定性 [8]。总之,这些先进的机器学习方法都在推动自动驾驶技术的发展,提升自动驾驶系统在不同场景下的安全性和可靠性。
4.人机交互:人机交互是一种将人类专家反馈纳入模型训练过程的先进技术 [9]。这种方法在自动驾驶系统中具有重要价值,因为它可以显著提高模型的泛化能力,同时帮助及时发现那些仅仅依靠模拟或虚拟测试无法捕获的潜在安全问题。通过人机交互技术,自动驾驶系统能够更好地理解复杂的驾驶场景,以及在特定情况下应采取的最佳行动。这有助于弥补传统机器学习方法在面对异常或罕见情况时可能出现的不足。此外,这种方法还可以促进自动驾驶系统与人类驾驶员之间的协同作战,提高整体道路安全水平。总之,人机交互技术对于提升自动驾驶系统的性能、安全性以及可靠性具有重要意义。
3.2 不确定性估计,数据质量和数量评估
自动驾驶系统的运行依赖于精密且复杂的决策方法,这要求对不确定性进行准确的估计,并对数据的质量和数量进行全面的评估。这些高度先进的系统利用各种传感器,如摄像头、激光雷达和雷达,来获取关于周围环境的详细信息,并基于这些数据作出行驶决策。然而,这些数据通常存在噪声、不完整性,以及受到各种误差来源的影响,这可能导致不准确的决策和潜在的不安全驾驶行为。因此,在开发和优化自动驾驶系统时,关键是要设计出能够有效识别和处理这些问题的算法,确保在各种情况下都能实现稳定、安全的驾驶。
子挑战
1.数据收集不确定性和质量评估 [11]:传感器信号可能受到天气、光线、灰尘以及其他传感器故障的显著影响,导致我们无法准确知道传感器数据的噪声水平。此外,在训练自动驾驶模型时,边缘场景与正常场景之间往往存在训练类别不平衡的问题,这使得我们难以获取足够的边缘场景案例数据来进行有效的模型训练。此外,自动驾驶系统还面临着有偏训练数据的问题。由于数据收集往往仅在非常有限或特定的场景中进行,这可能导致数据分布的偏斜,从而影响模型的泛化能力。
2.正确标注数据并正确推广到大规模未标注数据:首先,由领域专家进行数据标注的成本非常高,这包括劳动和时间成本,以及标签标准化在某些情况下可能存在的歧义 [12]。其次,在将已标注数据正确推广到未标注数据方面也存在困难。自动驾驶系统需要将大量已标注的训练数据输入深度学习模型,但由于并非总能对所有训练样本进行手动标注,这可能导致模型训练过程中梯度反向传播的不准确,从而降低模型性能。最后,对错误标注数据的检测和修订也是一个棘手的问题。训练样本有时可能被错误地标注,因此需要开发有效的工具来检测这些错误标签并自动进行纠正。
3.微调模型结构以最小化预测误差和模型不确定性:寻找最优模型结构和超参数集是一个具有挑战性的任务,因为它涉及到在庞大的参数空间中进行搜索和优化。其次,微调过的深度学习模型在给定输入输出时通常只能提供确定性的点估计,而缺乏不确定性估计,这对于评估模型预测的可靠性具有很大的局限性。最后,在模型训练阶段解耦噪声成分也是一个难以解决的问题。检测和诊断噪声来源对于可靠地控制车辆至关重要,但实际操作中却十分困难。
潜在的解决方向和趋势
1.数据收集的不确定性和质量评估:首先,针对部署中未知的传感器数据质量问题,可以采用硬阈值工程解决方案来处理和过滤噪声。其次,在解决边缘场景与正常场景之间的训练类别不平衡问题时,数据增强技术可以帮助改善数据分布,以提高模型在不同情况下的泛化能力 [13]。针对有偏训练数据问题,可以通过重新采样和数据增强来调整数据分布,以便在训练过程中减轻偏差。通过应用这些方法,研究人员和工程师们可以在自动驾驶系统中实现更高的性能和稳定性,从而提升整体的驾驶安全性。
2.正确标注数据并正确推广到大规模未标注数据:在自动驾驶系统的数据处理过程中,降低领域专家进行数据标注的成本显得尤为重要。为了实现这一目标,可以采用自动标注技术来减轻专家的工作负担 [12]。在将已标注数据正确推广到未标注数据方面,弱监督学习和半监督学习方法有望提供有效的解决方案,从而在有限的标注数据情况下实现更好的模型性能。此外,在错误标注数据的检测和修订方面,自动标注和自动标签修正技术可以帮助发现并纠正错误的标签,从而进一步提高数据质量。
3.微调模型结构以最小化预测误差和模型不确定性:在自动驾驶系统中,寻找最优模型结构和超参数集是一项具有挑战性的任务。针对这一问题,研究人员可以通过神经结构搜索技术或手动调整来进行优化。另一方面,微调过的深度学习模型通常只能为给定输入输出提供确定性的点估计,而缺乏不确定性估计。为了解决这一问题,可以采用贝叶斯深度学习方法,例如MCDropout [14],从而在预测时提供不确定性估计,有助于评估模型预测的可靠性。
3.3 多智能体与智能体-环境交互
在复杂的交通场景中,自动驾驶汽车需要与道路上的各种智能体进行高效且安全的互动,这些智能体包括其他自动驾驶汽车、人类驾驶的汽车、行人和骑自行车的人。这些智能体的行为可能具有难以预测的性质,因此对自动驾驶汽车的决策系统提出了巨大挑战。一个智能体的行为可能会引发连锁反应,从而影响环境中其他智能体的行为和动态。为了应对这种复杂性,自动驾驶系统需要具备高度的适应性和响应能力,以便在实时变化的交通环境中进行有效的决策。此外,自动驾驶汽车还需能够根据实际情况预测其他智能体的意图和行为,从而在确保行车安全的同时提高道路通行效率。
子挑战
1.准确预测多个智能体的行为并做出决策 [16]:准确预测多个智能体(如乘客、其他驾驶员和行人)的行为并准确地做出相应的决策至关重要。这些智能体的行为通常受到周围其他智能体的影响,因此自动驾驶系统需要具备高度的洞察能力和实时响应性。
2.人机自主交互,以避免可能导致碰撞的错误决策:随着自动驾驶汽车与人类驾驶的汽车逐渐共存,深入研究驾驶员和乘客在各种情况下如何感知和与自动驾驶汽车互动变得越发关键。事实上,研究表明,人类与自动化系统的互动在不同的驾驶场景下表现出差异性,这为进一步了解和优化人机自主交互提供了研究方向。
潜在的解决方向和趋势
1.博弈论模型:博弈论模型是解决多智能体互动挑战的有效方法之一 [17] [18]。博弈论模型能够有效地捕捉智能体之间的相互作用,为多智能体决策提供了有力的理论支持。博弈论模型可用于建模多个智能体(如自动驾驶汽车、人类驾驶的汽车、行人等)的行为,并在各种复杂场景中预测它们的行动。通过分析智能体之间的竞争与合作关系,博弈论模型有助于自动驾驶汽车作出更加合理的决策,以实现安全、高效的道路交通环境。

图5. 博弈论模型示例 [19]
2.多智能体强化学习:多智能体强化学习是解决复杂交通环境中智能体交互问题的有力方法之一 [16]。多智能体强化学习是一种高效的学习策略,通过这种策略,各个智能体可以在不断尝试和犯错的过程中学习彼此的交互行为,从而不断优化自身的决策策略。多智能体强化学习在自动驾驶领域的应用可以帮助车辆更好地理解和适应不同的交通场景,包括与其他自动驾驶车辆、人类驾驶车辆、行人等的交互。此外,通过领域自适应与迁移学习技术,多智能体强化学习可以有效地在不同环境和场景中实现知识和策略的迁移,进一步提升自动驾驶系统的泛化能力。
四、小结
本文主要探讨了自动驾驶领域的三个关键问题:模型泛化、不确定性估计与数据质量和数量评估,以及多智能体与智能体-环境交互。在模型泛化方面,我们讨论了如何通过迁移学习、领域适应和领域泛化技术来提高自动驾驶系统在不同场景下的性能。在不确定性估计与数据质量和数量评估方面,我们强调了准确评估传感器数据质量、处理有偏训练数据问题以及训练类别不平衡的重要性。在多智能体与智能体-环境交互方面,我们关注了自动驾驶汽车如何通过博弈论模型和多智能体强化学习技术来实现与其他道路使用者的高效互动。在后续的文章中,我们将会继续深入分析其他问题与挑战。
参考引用
[1]S. Kuutti, . R. Bowden, . Y. Jin and P. Bar, “A Survey of Deep Learning Applications to Autonomous Vehicle Control,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, pp. 712-733, 2021.
[2]IANS, “Mumbai Firm Genesys Empowering Self-Driving Cars in US with High-Precision HD Mapping,” 26 06 2018. [Online]. Available: https://beebom.com/mumbai-firm-empowering-self-driving-cars-in-us-with-high-precision-hd-mapping/. [Accessed 21 04 2023].
[3] M. J. Mirza, J. Micorek, H. Possegger and H. Bischof, “The Norm Must Go On: Dynamic Unsupervised Domain Adaptation by Normalization,” in 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Hybrider Event, New Orleans, 2022.
[4]A. Novikova, “DON’T DRIVE ME CRAZY: FEATURES TO ENSURE SELF-DRIVING CAR SAFETY,” 14 08 2022. [Online]. Available: https://intersog.co.il/blog/dont-drive-me-crazy-features-to-ensure-self-driving-car-safety/. [Accessed 21 04 2023].
[5]H. Shao, L. Wang, R. Chen, H. Li and Y. Liu, “InterFuser: Safety-Enhanced Autonomous Driving Using Interpretable Sensor Fusion Transformer,” in 2022 Conference on Robot Learning, Auckland, New Zealand, 2022.
[6]K. Chitta, A. Prakash, B. Jaeger, Z. Yu, K. Renz and A. Geiger, “TransFuser: Imitation with Transformer-Based Sensor Fusion for Autonomous Driving,” IEEE Transactions on Pattern Analysis and Machine Intelligence , 2022.
[7]H. Shu, T. Liu, X. Mu and D. Cao, “Driving Tasks Transfer Using Deep Reinforcement Learning for Decision-Making of Autonomous Vehicles in Unsignalized Intersection,” IEEE Transactions on Vehicular Technology, vol. 71, pp. 41-52, 2022.
[8]K. Zhou, Z. Liu, Y. Qiao, T. Xiang and C. C. Loy, “Domain Generalization: A Survey,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, pp. 4396-4415, 2023.
[9]J. Wu, Z. Huang, C. Huang, Z. Hu, P. Hang, Y. Xing and C. Lv, “Human-in-the-Loop Deep Reinforcement Learning with Application to Autonomous Driving,” arXiv preprint arXiv:2104.07246., 2021.
[10]A. BAKER-CAMPBELL, “FAIR WEATHER FRIEND: HOW DO LIDAR SYSTEMS COPE IN RAIN & FOG?,” 18 12 2020. [Online]. Available: https://www.autovision-news.com/adas/lidar-systems-rain-fog/. [Accessed 21 04 2023].
[11]R. Michelmore, M. Wicker, L. Laurenti, L. Cardelli, Y. Gal and M. Kwiatkowska, “Uncertainty Quantification with Statistical Guarantees in End-to-End Autonomous Driving Control,” in 2020 IEEE international conference on robotics and automation (ICRA), 2020.
[12]F. Lambert, “Tesla releases new footage of auto labeling tool for its self-driving effort,” 01 12 2021. [Online]. Available: https://electrek.co/2021/12/01/tesla-releases-new-footage-auto-labeling-tool-self-driving/. [Accessed 21 04 2023].
[13]W. Tong, J. Xie, T. Li, H. Deng, X. Geng, R. Zhou, D. Yang, B. Dai, L. Lu and H. Li, “3D Data Augmentation for Driving Scenes on Camera,” arXiv preprint arXiv:2303.10340., 2023.
[14]P. Goel and L. Chen, “On the Robustness of Monte Carlo Dropout Trained with Noisy Labels,” in the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 2021.
[15]“Multi-agent behavior understanding for autonomous driving,” [Online]. Available: https://archiveweb.epfl.ch/transport.epfl.ch//research-overview/vehicles-infrastructures/intelligent-vehicles/adas-vita-en/.
[16]S. Shalev-Shwartz, S. Shammah and A. Shashua., “Safe, Multi-Agent, Reinforcement Learning for Autonomous Driving,” arXiv preprint arXiv:1610.03295, 2016.
[17]J. F. Fisac, E. Bronstein, E. Stefansson, D. Sadigh, S. S. Sastry and A. D. Dragan, “Hierarchical Game-Theoretic Planning for Autonomous Vehicles,” in 2019 International conference on robotics and automation (ICRA), Montreal, Canada, 2019.
[18]N. Smirnov, Y. Liu, A. Validi, W. Morales-Alvarez and C. Olaverri-Monreal, “A Game Theory-Based Approach for Modeling Autonomous Vehicle Behavior in Congested, Urban Lane-Changing Scenarios,” Sensors, vol. 21(4), p. 1523, 2021.
[19]D. Cossins, “How to win at game theory,” 09 12 2015. [Online]. Available: https://www.newscientist.com/article/mg22830510-700-how-to-win-at-game-theory/. [Accessed 21 04 2023].
编辑:黄飞
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8412
-
【mBot申请】自动驾驶车2015-11-30 3915
-
自动驾驶真的会来吗?2016-07-21 14621
-
自动驾驶的到来2017-06-08 7488
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7595
-
自动驾驶的目标:比最好的人类司机更快更及时地作出决策2018-10-26 2772
-
如何让自动驾驶更加安全?2019-05-13 3795
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3321
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2935
-
自动驾驶汽车中传感器的分析2020-05-14 3647
-
为何自动驾驶需要5G?2020-06-08 4327
-
网联化自动驾驶的含义及发展方向2021-01-12 4971
-
自动驾驶车辆中AI面临的挑战2021-02-22 2704
-
浅谈自动驾驶的底层技术逻辑2022-11-29 1979
-
自动驾驶规控决策方面的建议与解决方案2023-10-19 1648
全部0条评论

快来发表一下你的评论吧 !
