

新型多参数电子皮肤可同步感知多种触觉信号
触控感测
描述
电子皮肤(e-skin)是人造机器人中重要的环境感知组件,需要对各种触觉信号敏感,包括应力、温度、湿度。传统的方法是使用不同类型的传感器阵列的组合来直接测量多个物理信息,这确保了信号之间不会相互干扰。为了获得更准确的物理信息,需要依赖更大密度和更广泛种类的传感器。然而,复杂的制造过程和有限的传感器种类限制了电子皮肤应用。另一种解决方案是创建和检测触觉相关物理量的场,包括应力场、温度场和磁场等。场在时间和空间上的连续性使我们能够用有限的数据拟合和再现整个场,从而以较小的代价做出更准确的预测。以往的研究采用光学方法检测应力场的变化,可以获得与传感器接触的物体的形状和硬度,但受限于相机的尺寸和刚性特性,光学方法难以应用于复杂曲面和柔性部位。另一项研究巧妙地利用传感材料本身作为应力场和温度场的载体,通过分析这两个场的空间分布,可以识别各种触觉运动。但这种方法只能给出粗略的触觉运动分类,不能给出准确的物理结果,也不符合人类的习惯。
作为一种精巧而强大的触觉器官,皮肤使人类能够快速响应并与周围环境进行精确交互。此外,由于皮肤具有柔软且可拉伸的特性,它可以将复杂的外部接触力转化为自身的形变,从而构成内部应力场(图1),并通过各种触觉感受器实现对该应力场的精确传感。这种应力场传感方法对皮肤内部的触觉感受器提出了很高的要求,以便在大的形变和压力下稳定工作。例如,迈斯纳小体(又称触觉小体)是皮肤表皮中的一种触觉感受器,由神经末梢、雪旺细胞和结缔组织组成,盘绕的神经末梢与扁平的雪旺细胞构成灵敏的机械感受器,周围的结缔组织将它们包裹得非常严密,以确保迈斯纳小体即使在皮肤发生较大形变和压力的情况下也能稳定工作。
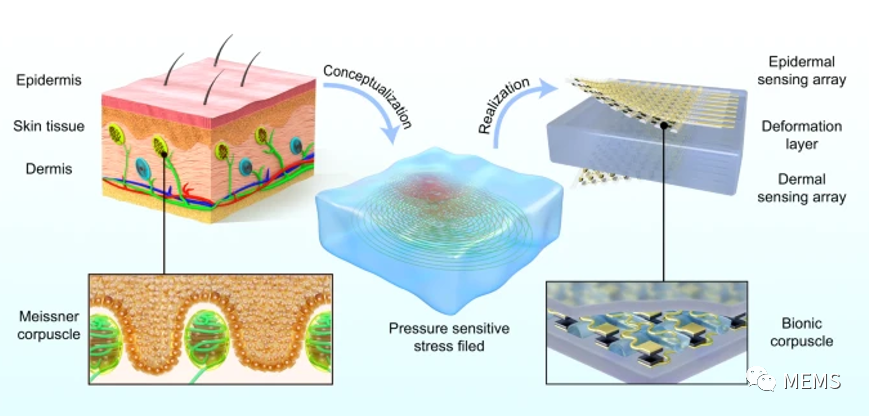
图1 迈斯纳小体结构的应力场传感和仿生示意图
据麦姆斯咨询报道,近期,受人体皮肤的机械刺激传感原理以及皮肤结构支持应力场传感原理的启发,深圳大学物理与光电工程学院柔弹性电子与纳米传感器(SENS)研究中心设计了一种称为仿生机械感受器(BMRs)的电子皮肤,通过重构应力场,该电子皮肤具有仿生、结构简单、运行稳定以及多参数传感的特点。相关研究成果以“Multi-parameter e-skin based on biomimetic mechanoreceptors and stress field sensing”为题发表于npj flexible electronics期刊。
该仿生机械感受器模拟人类皮肤的结构,由“表皮”传感阵列、“真皮”传感阵列以及夹在二者之间的类皮肤形变层组成。其中,类皮肤形变层由弹性体制成,作为应力场的载体,形变层一旦受到外力作用,很容易发生形变;“表皮”传感阵列和“真皮”传感阵列中包含模拟迈斯纳小体结构的压力检测单元,对形变层顶部和底部的应力场分布进行采样。
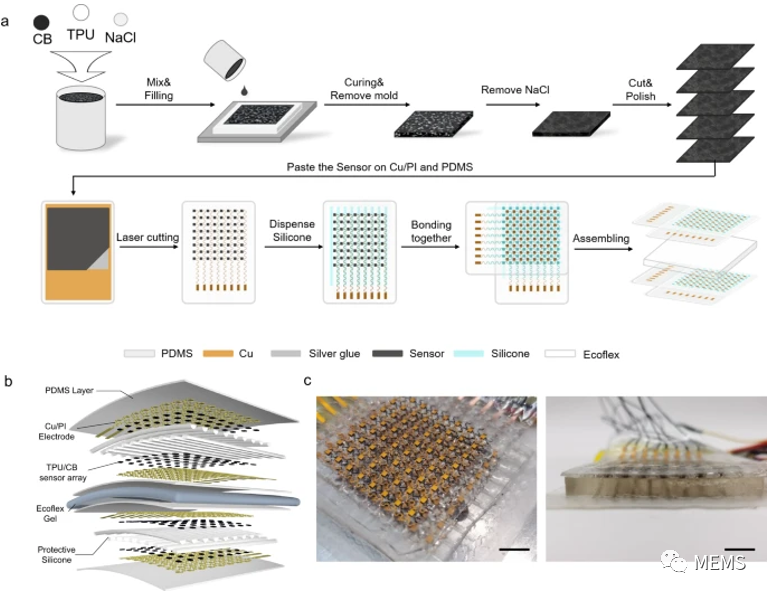
图2 仿生机械感受器(BMRs)和组件的制备流程
通过重构和分析应力场,该仿生机械感受器可以精确测量三维力,并区分不同硬度的物体,无需集成多个传感器即可以直接测量相应的触觉信号。此外,由于应力场的变化只受外力的影响,不依赖于采样位置,这种电子皮肤可以用简单的方法制造,而且易于集成在曲面上,用于实际的触觉任务。
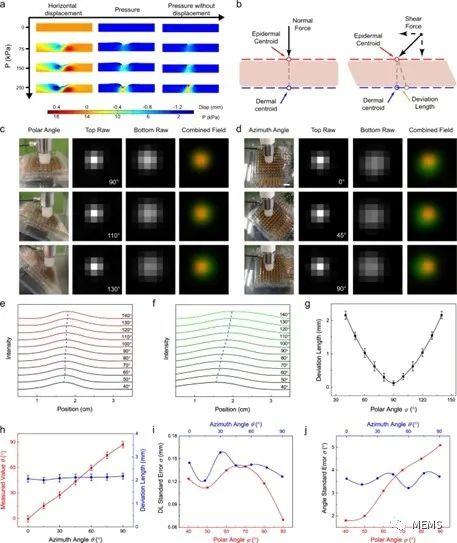
图3 基于应力场传感的三维力检测
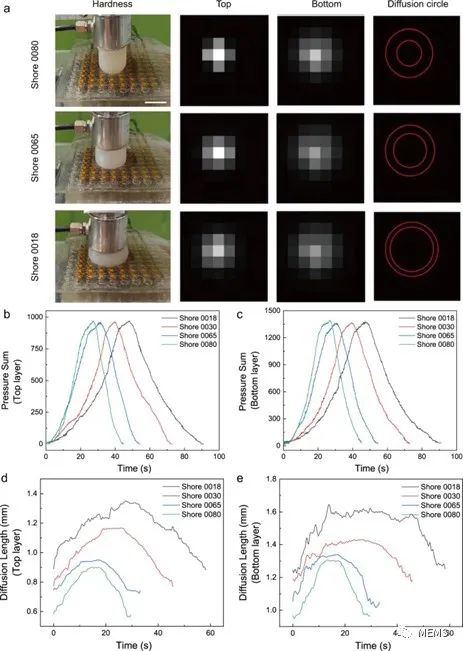
图4 物体硬度的测量
更重要的是,这种应力场传感原理允许模块化设计,即仿生机械感受器的每个部分都可以根据特定的传感需求进行替换。例如,对于机器人指尖的灵敏触觉传感,可以使用低模量凝胶作为高灵敏传感阵列的形变层;而对于主要需要高应力疲劳抵抗的机器人关节,可以使用高强度橡胶作为形变层,并使用传感阵列实现宽测量范围。因此,该研究为机器人触觉传感提供了一种通用且可靠的解决方案。
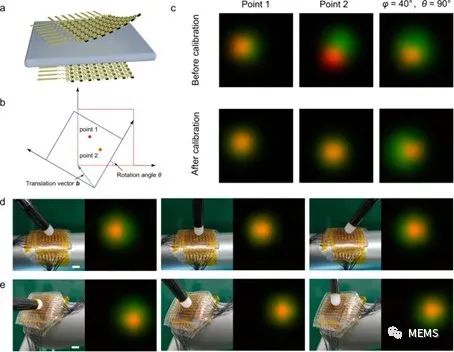
图5 仿生机械感受器(BMRs)模块化及其在曲面上的应用演示
总体而言,该应力场传感方法代表了一种能够从简单的电子皮肤结构中获得多参数触觉信号的策略。值得注意的是,这种简单的方法也是强大的、可靠的和普遍适用的。
编辑:黄飞
-
2026电子皮肤赋能具身智能机器人专题论坛即将召开,共同探索触觉感知新未来2025-12-29 1435
-
中国科学院:电鳗启发离子电子人造皮肤,具有多模态感知和传感器内储层计算功能2025-05-11 1297
-
“电子皮肤”,人形机器人的柔性触觉传感器2025-04-07 6531
-
中山大学:在柔性触觉传感电子皮肤研究进展2025-02-12 2238
-
我国科学家研制出具有仿生三维架构的新型电子皮肤系统2024-11-14 36327
-
基于视觉的多模态触觉感知系统2023-10-18 2244
-
电子皮肤穿戴设备是什么 电子皮肤和显示皮肤区别是什么2023-08-22 3089
-
号称电子皮肤的触觉传感器2023-06-29 1660
-
集成传感器阵列的电子皮肤应变感知示意图2022-07-29 2121
-
元宇宙怎么感知触觉2021-11-09 7249
-
电子皮肤触觉传感的原理及应用2020-09-02 9431
-
新型触觉虚拟与增强现实系统,非常真实的电子皮肤2019-12-12 4316
-
机器人的电子皮肤可以提高探测并感知周围环境的能力2019-07-21 3971
-
清华大学成功研发出可测人体信号的“电子皮肤”2018-12-30 2517
全部0条评论

快来发表一下你的评论吧 !
