

往年 | 大疆雷达算法校招笔试题目解析
电子说
描述
本文首发于公众号【调皮连续波】,其他平台为自动同步,内容若不全或乱码,请前往公众号阅读。保持关注调皮哥,和1.5W雷达er一起学习雷达技术!
| 序号 | 类别 | 内容 | 文件路径 |
|---|---|---|---|
| 1 | 无 | 无 | 无 |
【正文】
编辑|小助理 审核|调皮哥
本文图片中的答案仅仅是为了说明题目,并不是正确答案,额外注意!文中的解析仅作为学习参考。
1、FFT主要利用旋转因子 的什么性质,减少运算量?
答:对称性和周期性
2、采样率fs,采样M个实数,进行N点(补零为2的整数次幂)FFT变换,其频率分辨率、最大可观测频率是多少?
答:实采样(双边谱)的最大可观测频率是采样率的一半(fs/2),N点FFT的频率分辨率是fs/N。
3、实际FFT计算时一般要对数据进行加窗,窗函数的作用是?
答:降低频谱泄露。
点评:上面这三个题目可以说时雷达参数估计的基本题目了,需要注意。
4、当采用圆极化天线接收极化电磁波时,一般会有多少损失?
答:使用圆极化天线接收线极化损耗只有3db。
5、将N次测量回波进行非相干积累,其SNR提高多少倍?
答:N次样本的相干(相参)积累将SNR提高了N倍,得到了积累增益。积累的好处不言而喻,高的SNR对信号处理中的检测和参数估计的帮助是十分重要的,但是有得必有失,N个脉冲需要更多的时间,能量和更大的运算代价。
对于非相干积累,由于这种积累只利用到了信号的部分信息,也就是幅度信息,所以效率是比相干积累低的。
雷达专家Marcum和Swerling指出,非相干积累的增益值在 和M之间,当M很大时,积累增益接近 。本题答案是D。非相干积累的效率要比相干积累低,可以看作是牺牲增益换取的。
6、关于概率数据关联算法PDA说法错误的是?
答:PDA算法是一种用于杂波环境中单目标跟踪(属于特殊的多目标跟踪)的算法,另外还有个算法叫JPDA,适用于真正意义上的多目标。
PDA的思想是认为只要是存在于关联门内的有效观测值,就有可能源于目标,只是每个有效观测值源于目标的概率不同。通过大量的相关计算给出每个有效观测值的概率加权系数,计算所有有效观测值的加权和作为真实目标观测值的估计,从而在卡尔曼滤波中更新目标状态。概率数据关联算法是一种次优滤波方法,它只对最新的量测进行分解。
PDA方法计算量小,但是稍微大于卡尔曼是对的。而PDA对所有的目标和量测进行排列组合,从中选出合理的联合事件来计算联合概率,是错的,这JDPA算法的步骤。
7、雷达采用单脉冲比相法测角,如图1所示,以下最大测角范围正确的是?
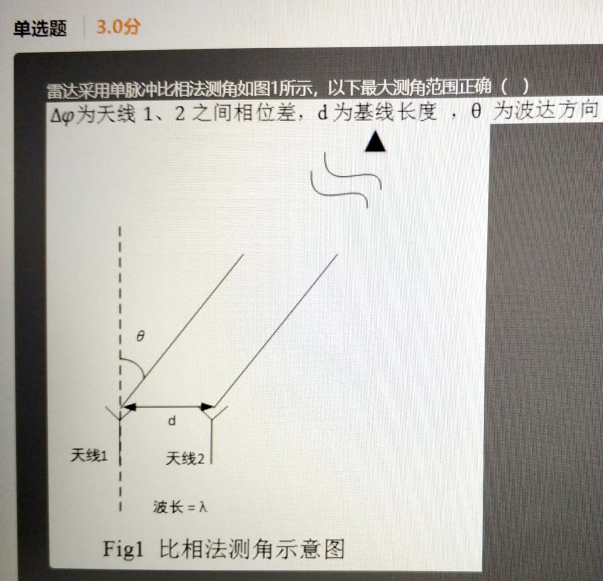
答:模型图如下,假设两天线之间的距离d,远远小于目标到振源的距离,则可以认为到达接收点的目标所反射的电磁波近似为平面波。目标到 A、B 两点的距离相等,回波到 A,B 两点的相位也相等。
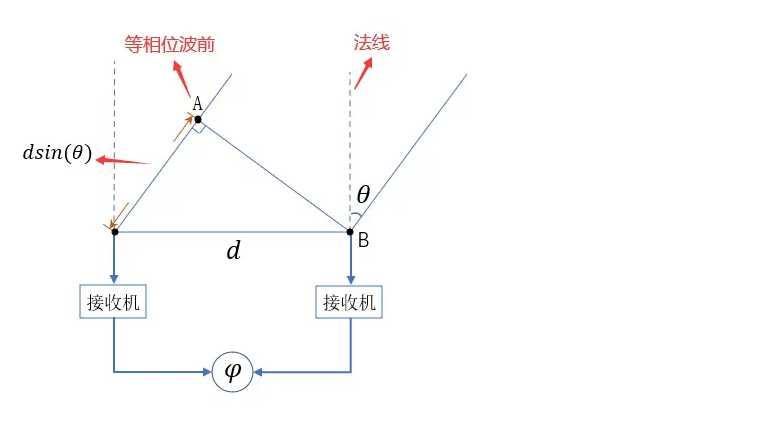
回波到接收点的波程差 ,对应相位差假设为 ,一个波长对应相位差为 ,则波程差 对应的相位差 为:
所以,如果用相位计进行比相,测出其相位差 ,就可以计算目标角度 。
该值为相对于法线的夹角,需要根据 的符号确定 到底在雷达法线的左侧还是右侧,因此当 时, 不存在角度模糊,对应的角度取值范围就是 ,带入 得到:
因此角度范围在 之间。
8、如题7图所示,关于比相测角最大测角范围说法正确的是?
答:根据公式即可得到答案,雷达最大测角范围与基线长度d相关。
9、不考虑别的因素,波长越短会使雷达作用距离如何,角度分辨率如何?
答:根据雷达方程来看,如下所示,波长越短,其实作用距离会越短,这就是为什么毫米波雷达不适合远距离通信和探测的根本原因,更深层次的原因的因为电磁波的大气衰减。
根据雷达的角度分辨率的计算公式,如下所示:
可知,波长越短,角度分辨率越高,这就是为什么要从24G跨越到77G的根本原因之一。
10、关于卡尔曼滤波下列说法错误的是?
答:原始卡尔曼滤波算法(KF)、扩展卡尔曼滤波算法(EKF)以及无迹卡尔曼滤波算法(UKF)三者的关系如下:
联系:三者都是贝叶斯滤波的高斯滤波,即采用高斯分布逼近了贝叶斯滤波中预测步和更新步中所用到的某些概率分布,从而达到可以进行近似计算的目的,KF是EKF和UKF思想的基础,EKF和UKF是KF在非线性情形下的近似实现方式。
区别:KF针对于线性高斯的情况,EKF针对于非线性高斯,其是将非线性部分进行一阶泰勒展开,因此忽略了高阶项,误差较大。UKF是将UT变换与KF结合的产物,它的基础理念是接近一个非线性函数的概率分布非接近其本身更简单。后两种卡尔曼是针对同一问题的不同思路的解决方案,其实UKF的能力已经跳出了非线性高斯的范围,其也可以解决非高斯问题,只不过在这方面PF能做的更好,运算量也更大。
所以答案是C。
11、关于FFT补零,说法正确的是?
答:影响DFT(FFT)分辨率最本质的物理机制在于DFT的积累时间,分辨率为积累时间Ts的倒数,这点从下面的数学公式上可以很容易得到:
所以在满足奈奎斯特定理前提下,补零并不会提高频率分辨率,这从信息论的角度来讲,补零并没有增加任何有用信息,而增加积累时间可以增加有用的信息。其实换做雷达信号处理中的距离估计,FFT补零并不会提高距离分辨率,理论距离分辨率仅和发射信号有效带宽有关。
用MATLAB做FFT并不要求数据点个数必须为以2为基数的整数次方。之所以很多资料上说控制数据点数为以2为基数的整数次方,是因为这样就能采用以2为基的FFT算法,提升运算性能。
补零对原数据起到了做插值的作用,克服“栏栅”效应,使谱的外观平滑。另外,由于对数据截短时引起的频谱泄漏,有可能在频谱中出现一些难以确认的谱峰,补零后有可能消除这种现象。
最后,补零确实可以提高频率的估计精度,具体可以参考这个链接:https://ww2.mathworks.cn/help/signal/ug/amplitude-estimation-and-zero-padding.html
11、关于卡尔曼滤波器发散原因描述正确的是?
答:造成卡尔曼滤波发散的原因无外乎以下两点:
(1) 状态方程描述的动力学模型不准确,或者噪声的统计模型不准确,这样会使模型和量测值不匹配,导致发散。
(2)递推过程计算机摄入误差累积,使得方差阵失去正定性或者失去对称性,导致增益计算失去加权效果,从而导致滤波器发散。
所以选择D。
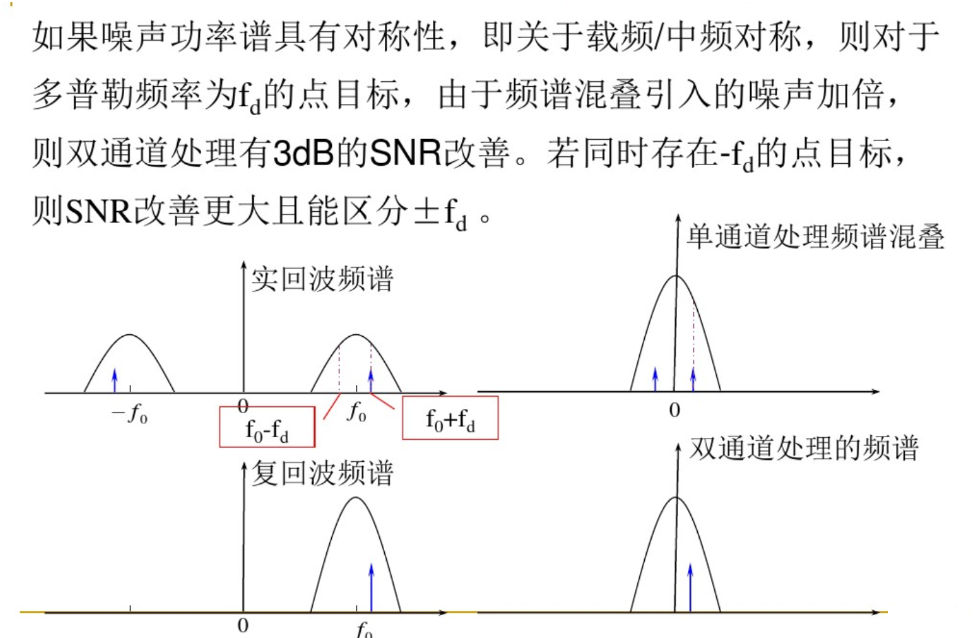
12、IQ正交双通道处理(相对于单通道)增益?
答:
13、雷达测角原理主要利用以下的什么特性?
答:AB。
14、常见的电磁波极化方式有?
答:极化,就是指波振动的平面,电磁波的传播是由相互垂直的电场和磁场产生的。因此存在电场和磁场两个相互垂直的振荡平面,所以定义电场的振荡平面为电磁波的极化:即空间固定点,电场E随时间变化的方式。按照电场E的变化方式,可以将平面电磁波的极化分为三种:线极化,圆极化和椭圆极化。
15、MUSIC算法估计角度,不需要知道信源数先验信息?
答:MUSIC算法需要精确已知信号个数,这样它才能划分信号和噪声子空间。
16、在采样长度一致的情况下,提高采样率并不能提高频率分辨率?
答:根据采样定理,采样数据长度若不变,采样点数N增加倍数与采样频率fs增加倍数是相同的,故不能增加计算上和物理上的频率分辨力。
17、卡尔曼滤波可以处理多维非平稳随机的随机过程?
答:卡尔曼提出的递推最优估计理论,采用状态空间描述法,在算法采用递推形式,卡尔曼滤波能处理多维和非平稳的随机过程。
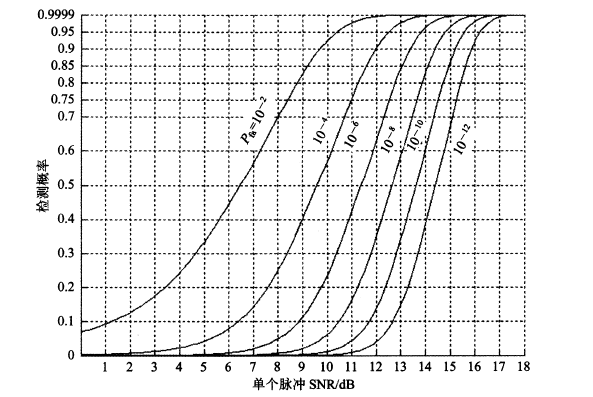
18、当虚警率一定时,要提高发现概率,只能提高SNR?
答:看图,当虚警率一定时,要提高发现概率,只能提高SNR。
19、FMCW体制雷达中,要提高距离分辨率,通过提高频率分辨率即可?
答:雷达的理论距离分辨率只和发射信号有效带宽有关,提高频率分辨率是通过增加采样时间,但增加采样时间并不一定就是增加了发射信号有效带宽。
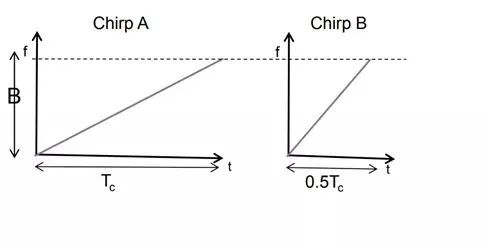
所以只要雷达的带宽一样,无论信号持续的时间、信号的调频斜率如何都不会影响到雷达的距离分辨率。下图所示的两种调频斜率,其距离分辨率是一致的。
20、在雷达接收机中,接收机前端对噪声系数的影响最大?
答:对。
雷达接收机的射频前端主要进行的是滤波、放大、频率转换等信号处理,而固有噪声存在于整个接收机前端系统,从而对接收的雷达信号产生影响,降低了输入射频信号的信噪比。而噪声系数(NF)就是对这种影响的度量。所有接收机的灵敏度都受到热噪声的限制,而在雷达中,主要是来自接收机的热噪声(而不是外部噪声源)
21、IQ正交双通道比单通道平均有3dB SNR改善?
答:对,这也就是为什么采用复基带架构的根本原因。
(推荐必读)为什么FMCW毫米波雷达系统中要使用复基带架构?
22、FFT估计频率,要提高频率分辨率,提高采样率即可?
答:错。提高时域分辨率得提高采样频率,提高频域分辨率得增长采样时间,二者都想提高的话,就得提高采样频率的同时,增长采样时间,FFT的点数就相应增加了,运算复杂度也会增加。
23、ADC采样率提高一倍,采样率平均有3dB SNR改善?
答:这个问题是过采样提高量化信噪比的问题,增加采样率确实可以使得信号的量化信噪比提升,公式为:
不过这个噪声是ADC量化噪声,并不是雷达系统本身信噪比,请注意区分。
24、ADC转换位数增加1位,平均有3dB的改善?
答:每增加一倍的采样频率,就会提高信噪比3dB,相当于提高了ADC 个bit,当然这也是ADC量化噪声,而不是雷达系统本身的噪声。
由于篇幅关系,这个题目还有两道解答大题留在下一篇文章分析,敬请关注。
【本期结束】
本文不涉及任何利益,都是空闲时候的个人心得和体会,仅供参考。目前我的工作经验尚浅,还有很多内容需要学习,如果还有没有说到或者不全面的地方,还请指正,感谢大家。
喜欢本文,可以转发朋友圈。欢迎关注【调皮连续波】和备用号【跳频连续波】
。
审核编辑 黄宇
-
【硬件方向】名企面试笔试真题:大疆创新校园招聘笔试题2025-05-16 841
-
雷达校招 | 往年雷达算法校招笔试题分析2023-05-08 3249
-
模拟设计的笔试面试题目2022-08-01 3434
-
大疆创新校园招聘笔试题-硬件真题2022-04-29 25275
-
【机试题】2014大疆嵌入式笔试题(附超详细解答,下篇)精选资料分享2021-07-28 2109
-
软件工程师笔试题目(嵌入式方向)资料下载2018-04-19 1634
-
大疆笔试题(FPGA)2017-11-21 4296
-
46家著名公司的笔试题目2017-10-27 1088
-
2014全志数字IC笔试题目2016-12-14 1805
-
华为最全上机笔试题目2016-10-09 4767
-
C语言程序设计_宇视科技2015年招聘笔试题2016-01-08 1139
-
2014校招笔试题2015-11-02 867
-
FPGA笔试面试题目2012-08-07 9297
全部0条评论

快来发表一下你的评论吧 !
