

雷达资讯 | 微波视觉三维合成孔径雷达(MV3DSAR)
电子说
描述

背景及意义
阵列干涉合成孔径雷达(SAR)通过一次飞行就可获得空间多角度相干观测数据,能有效排除时间去相干的影响,实现对测区的三维成像。然而当前阵列干涉三维SAR系统所需的通道数较多(通常需要十余个),系统复杂、研制难度大,系统的低成本、小型化及其应用推广均具有较大难度,亟需在SAR三维成像理论和体制上进行创新。
近年来,在国家自然科学基金重大项目的支持下,中国科学院空天信息创新研究院丁赤飚院士、仇晓兰研究员牵头,并联合中科宇达(北京)科技有限公司成功设计研制了国内首套无人机载小型化阵列干涉三维SAR系统,称为微波视觉三维SAR(MV3DSAR),并成功开展了飞行实验,仅用四个阵列通道就获得了复杂场景的三维成像结果,显示了良好的三维结构重建和目标解叠掩能力,促进了SAR三维成像技术的新发展。
系统技术参数及关键技术
MV3DSAR系统的总体构成如下表和图所示,其主要由微小型SAR载荷、无人机平台及导航系统三部分组成,通过结构件进行固定和连接。为了实现基线可重构的需求,系统在天线支架上打有固定间隔的排孔,可以根据需求进行天线构型的灵活配置。表 1 MV3DSAR系统总体构成| 序号 | 名称 | 说明 |
| 1 |
微小型 Ku-SAR |
Ku-波段SAR系统,由雷达主机、天线及天线支架、开关组合、数据存储模块等组成 |
| 2 | 无人机平台 | 采用KWT-X6L-15六旋翼无人机,最大作业载荷15kg、最大翼展尺寸2.53m,最大飞行速度15m/s |
| 3 | 导航系统 | 由GPS模块和微型惯性测量单元(MIMU)模块组成;航迹测量精度0.05m,姿态测量精度0.02度 |
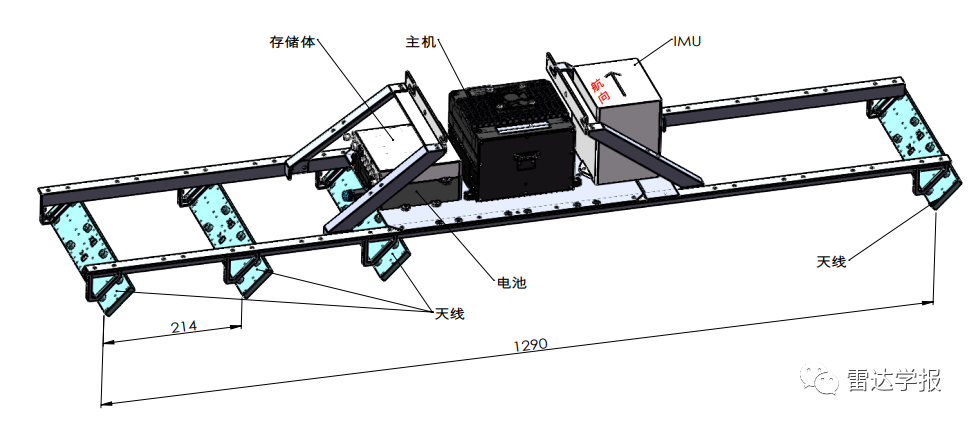

MV3DSAR系统最核心的是Ku波段阵列干涉SAR,该SAR载荷的主要参数如下表所示,其采用调频连续波体制,信号带宽为1.2GHz,中心频率为15.2GHz,重量为7.07kg。
表 2 Ku波段阵列干涉SAR载荷参数| 序号 | 参数名称 | 参数值 |
| 1 |
中心频率 |
15.2 GHz |
| 2 | 信号形式 | 调频连续波(FMCW) |
| 3 | 极化方式 | 全极化 |
| 4 | 信号带宽 | 1200 MHz |
| 5 |
天线尺寸 (单通道) |
0.05 m(俯仰)×0.05 m(俯仰) |
| 6 | 每个极化的阵列通道数 | 4 |
| 7 | 分辨率 |
优于0.2 m(距离)×0.2 m(方位)×2 m(斜高) |
| 8 | 通道相位不平衡稳定度 | ±5°(10 min内) |
| 9 | 通道幅度不平衡稳定度 | ±0.2 dB(10 min内) |
| 10 | 中心视角 | 45° |
| 11 | NESZ |
不大于-30 dB (最远作用距离3.6 km) |
| 12 | 天线最小间隔 | 0.107 m |
| 13 | 天线最大间隔 | 1.284 m |
| 14 | Ku-SAR重量 | 主机、存储、电池、天线、结构等一共7.07 kg |
MV3DSAR系统致力于小型化、低成本、高精度,在系统研制过程中突破的主要关键技术包括以下几个方面:
(1) 多通道一致性技术
MV3DSAR具有多个接收通道,为保证多通道信号之间延时、增益与相位的一致性,MV3DSAR采用了基于低温共烧陶瓷技术的多通道一致性设计、一致性定标回路设计、多通道间电磁屏蔽防串扰设计等有效方案,使得系统通道间相位一致性达到±5度以内,为三维成像提供有力保障。
(2) 高精度运动补偿技术
MV3DSAR作业平台飞行高度相对较低,运动误差及姿态变化对成像的影响相对较大,同时阵列干涉要求高精度保相成像,因此对运动补偿提出了更高的要求。MV3DSAR集成了微型惯性测量单元,通过双捷联处理获取相对位置精度优于0.3mm的航迹测量数据;同时在成像过程中根据中心频率的变化进行处理频带和运动误差计算参考的调整,并提出基于子孔径处理和相干合成的高精度运补成像算法,有效保证了成像精度和效率。
(3) 基于微波视觉的SAR三维成像技术
由于MV3DSAR只有4个阵列通道,现有三维成像方法在较少观测次数下面临三维求解误差大、空间模糊等问题。因此,MV3DSAR创新性地将微波视觉信息与SAR三维成像模型有机结合,实现了少量通道下的三维成像。具体的,通过SAR图像语义分割和点云迭代处理提取空间几何结构约束,用于约束三维成像的解空间并进行三维解模糊,以提升少量观测下的三维成像性能。
微波视觉三维SAR
成像结果展示
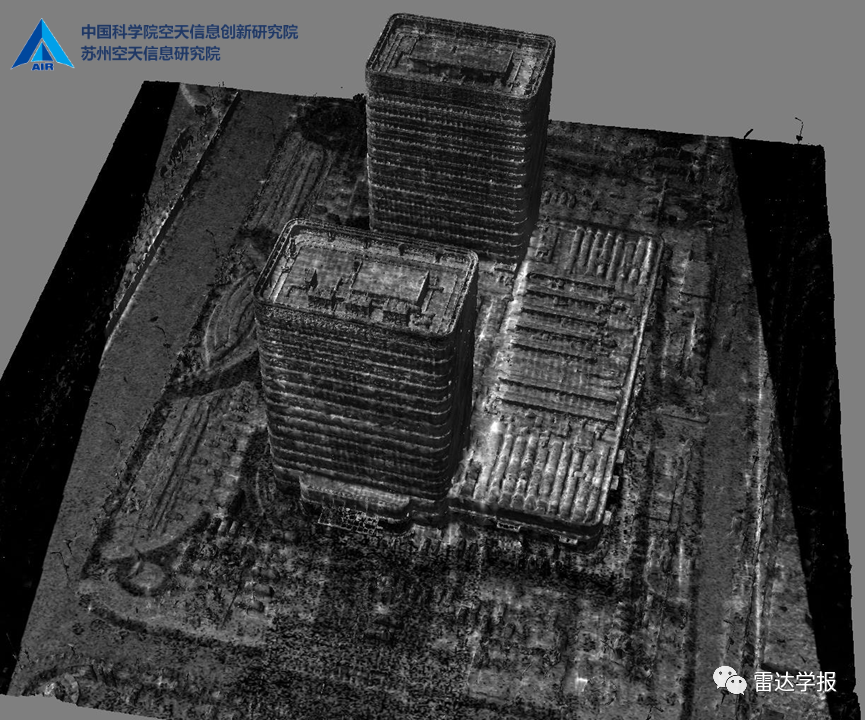
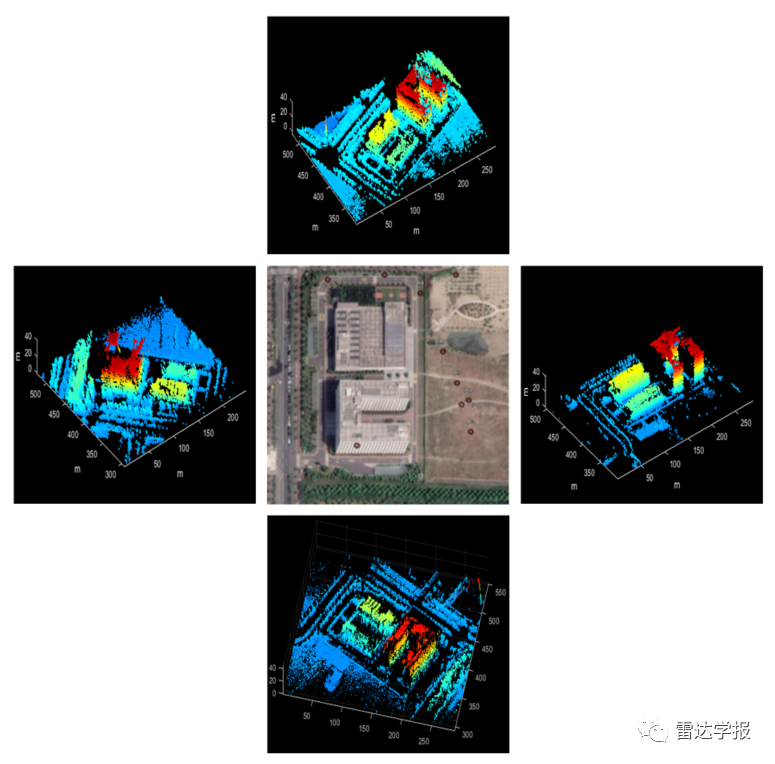
MV3DSAR系统已经分别在天津、苏州地区完成了多次飞行试验,成功处理得到了测区内单极化、全极化的三维成像结果,如下所示。
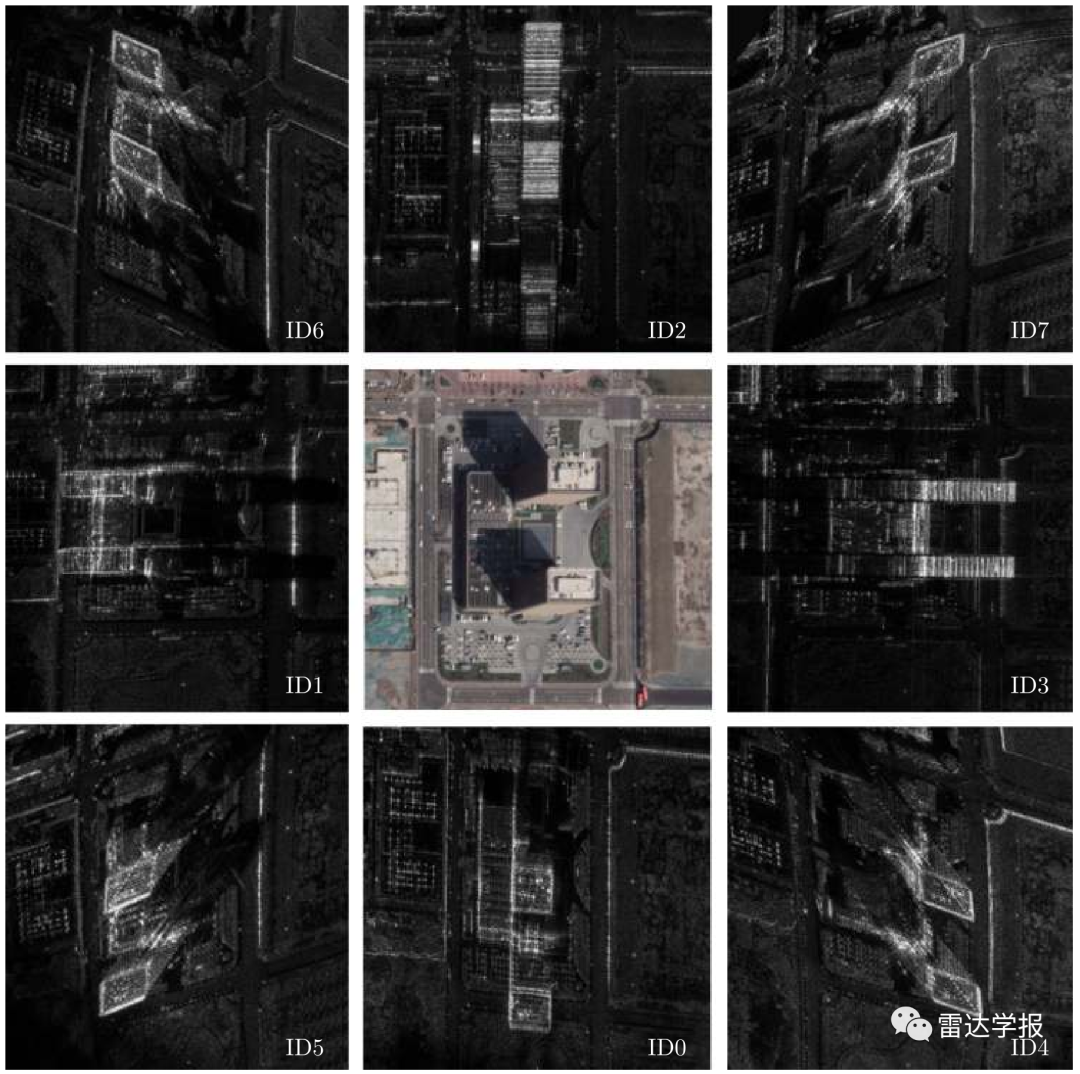
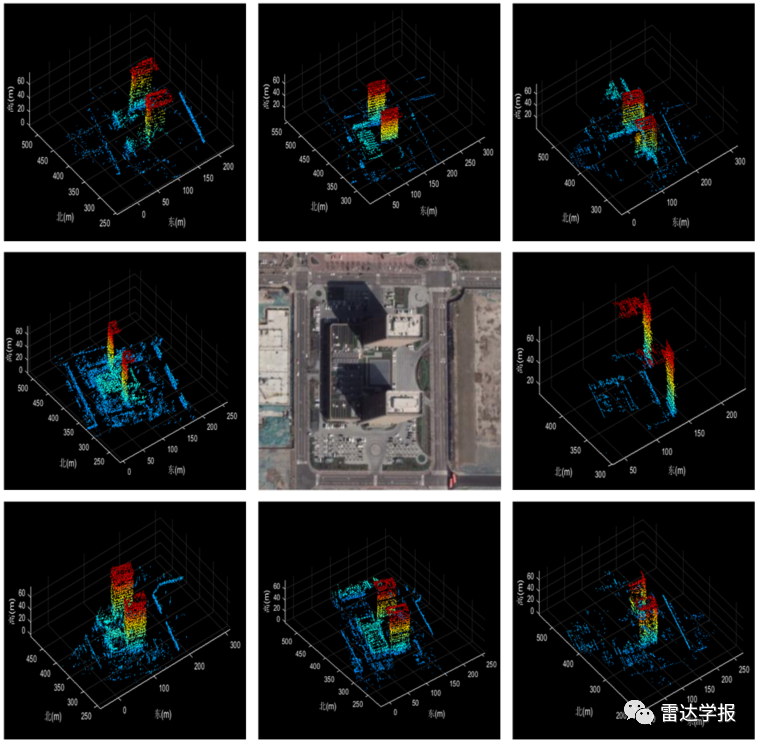
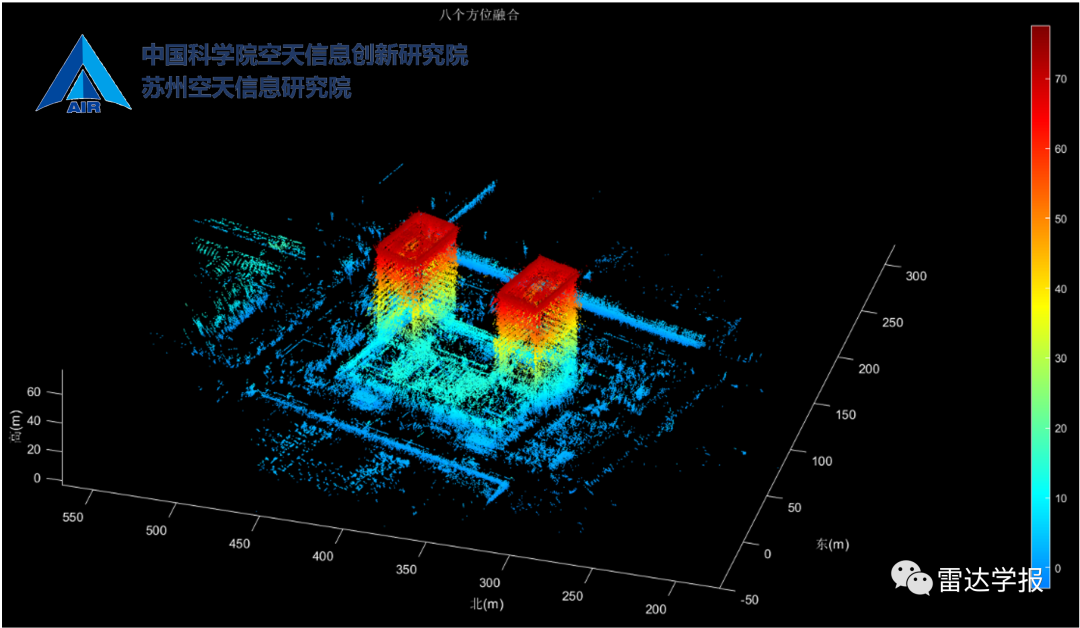
图 3 天津临港商务大厦各角度三维成像融合结果(单极化,按高度渲染)
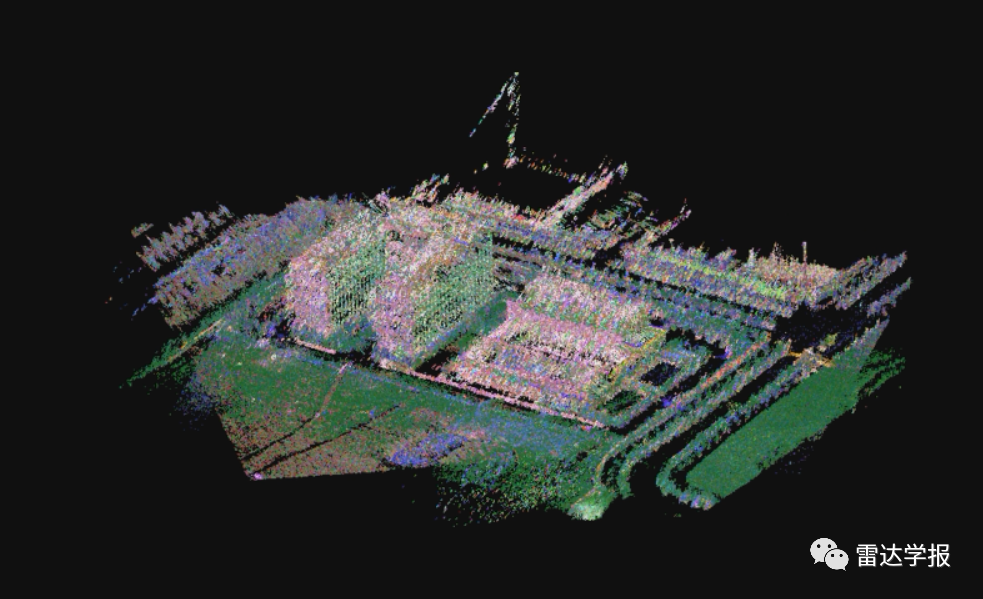
此外,针对传统二维成像难以分辨的叠掩区域,研究团队对上述三维成像结果进行了解叠掩分析,结果如下所示。
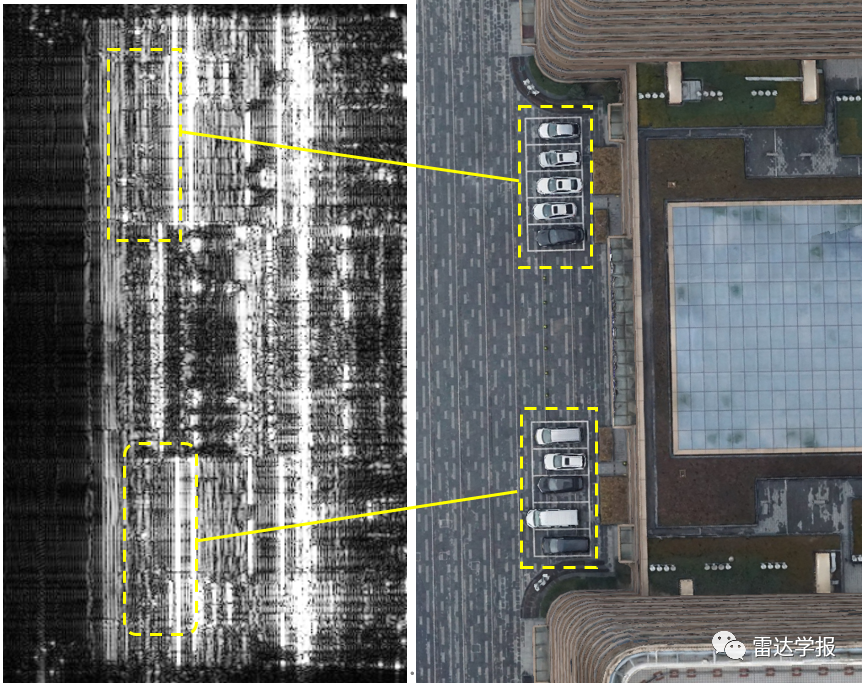
图 7 建筑物与汽车等解叠掩效果
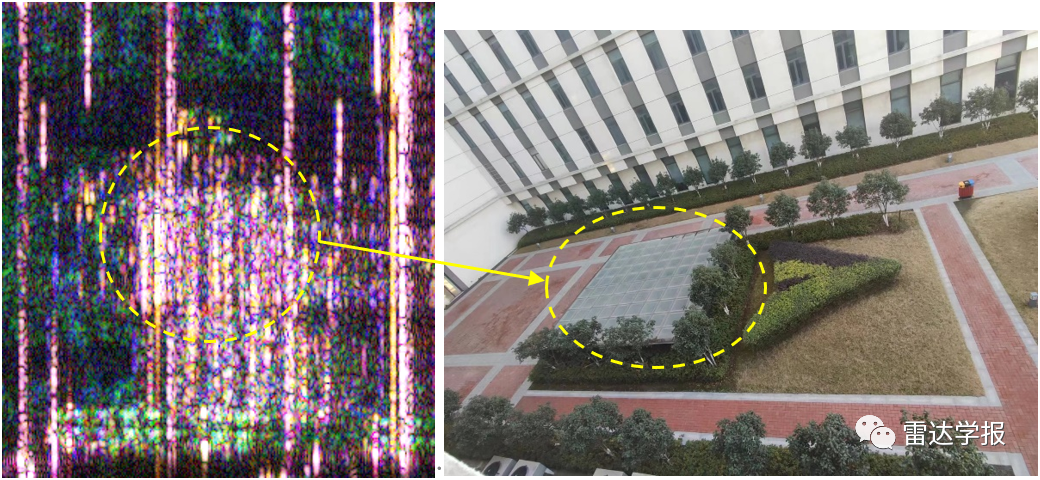
图 8 屋顶与采光井的解叠掩效果
更多雷达科普与资讯请点击“阅读原文” ↓↓↓相关阅读
第三届“雷达与未来”全球峰会雷达与微波视觉分论坛暨第三期雷达学报大讲堂通知
博士论坛 | 基于压缩采样恢复的高轨照射源双基SAR成像方法(视频)
学术报告 | 多角度SAR三维成像技术研究进展(视频)
学术讲堂 | 基于GNSS的双基SAR成像处理技术(视频)
审核编辑 黄宇
-
合成孔径雷达(SAR)系统设计2023-12-18 5638
-
合成孔径雷达原理知识总结2023-10-23 4210
-
近场合成孔径雷达稀疏测量微波成像简析2023-05-12 2812
-
合成孔径的雷达研究热点2023-02-07 2039
-
怎么实现合成孔径雷达卫星电磁兼容设计?2021-05-26 1565
-
合成孔径雷达利用微波成像观测地表信息2021-03-11 2769
-
合成孔径雷达的工作原理是什么?2020-04-08 5292
-
合成孔径雷达的工作原理_合成孔径雷达的特点作用2020-01-20 36183
-
载合成孔径雷达系统的接口实现与设计2019-04-25 3800
-
合成孔径雷达的研究热点解析2018-05-04 2880
-
超宽带合成孔径雷达方程研究2016-12-28 1113
-
合成孔径雷达图像处理电子书2011-07-28 2089
-
合成孔径雷达卫星2010-08-31 1074
-
合成孔径雷达转发式干扰分析2010-02-09 1026
全部0条评论

快来发表一下你的评论吧 !
