

雷达校招 | 往年雷达算法校招笔试题分析
电子说
描述
本文首发于公众号【调皮连续波】,其他平台为自动同步,内容若不全或乱码,请前往公众号阅读。保持关注调皮哥,和1.4W雷达er一起学习雷达技术!
2023年度会员内容更新公告(04.10)
| 序号 | 类别 | 内容 | 文件路径 |
|---|---|---|---|
| 1 | 雷达工具 |
雷达工具箱 MATLAB源码 |
根目录雷达工具箱 |
【正文】
编辑|小助理 审核|调皮哥
1、2016年5月美国佛罗里达州发生的特斯拉自动驾驶第一起命案,当时Models行驶在一条双向、有中央隔离带的公路上,自动驾驶处于开启模式,此时一辆拖挂车以与Models垂直的方向穿越公路
由于拖挂车正在横穿公路,且车身较高,这一特殊情况导致Models从挂车底部通过时,其前挡风玻璃与挂车底部发生撞击从而发生事故,据悉特斯拉的自动驾驶系统安装有77GHZ毫米波雷达系统,关于毫米波雷达在此次自动驾驶事故中失效的原因解释你认为正确的是
A. 横向拖挂车的雷达特征与路牌类似,雷达误以为是路牌
B. 白色拖挂车缺乏纹理特征雷达没法检测
C. 雷达安装位置过低雷达波束从下侧穿过卡车,导致漏检
D. 横向穿越的拖挂车其径向速度为零,雷达无法检测静止的目标
解析:目前这款雷达是传统的毫米波雷达,特点是只有距离、速度和水平角度信息,没有高度信息。
A、B答案不符合雷达检测道路障碍物的逻辑,颜色对雷达检测不敏感。即使没有高度信息,只要在雷达前方有目标就属于障碍物,此时的雷达还不具备目标识别功能。
C答案不完全对,雷达波束确实会穿过卡车底部,但俯仰维度还是存在一定的波束宽度,况且汽车是金属,不可能完全没有电磁波反射。
D答案在目前看来也是不完全对的,但是放在2016年的77G雷达可以认为是对的。因为卡车是垂直Model Y方向行驶,如果同时行驶速度又很慢的话,因为缺乏径向多普勒分量,雷达的识别算法很容易将其当成静态目标过滤掉。
当前的4D成像雷达,不仅存在高度信息,而且采用点云成像思路,即使横向目标运动缓慢,也会在距离维度(横向运动的汽车其本身的径向距离也是变化的)、微多普勒维度上体现。
2、关于信号处理中窗函数的影响,以下说法错误的是
A. 会使得旁瓣变低
B. 会提升多目标的分辨力
C. 会使得主瓣展宽
D. 切比雪夫(chebwin)加窗会使得旁瓣相等
解析:加窗会使得旁瓣降低,这是毋庸置疑的。能量守恒定律,旁瓣降低主瓣频谱就会展宽,展宽频谱也就意味着频谱分辨率下降,因此对于多目标的分辨力下降。在给定旁瓣高度下,Chebyshev窗的主瓣宽度最小,具有等波动性,也就是说,其所有的旁瓣都具有相等的高度。
3、在杂波背景中进行目标检测时,为了提高目标检测性能,可以
A. 提高信号采样率
B. 提高发射功率
C. 提高信号带宽
D. 提高角度分辨率
E. 提高脉冲重复频率
F. 增加积累时间
G. 提高信号时宽
解析:雷达的基本理论,这里显然是只考虑杂波或者杂波占主要成分的场景。杂波是不需要的目标(海杂波、地杂波、雨雪冰包杂波等),噪声是不需要的信号成分,干扰是受到了其他电磁信号的干扰。
如果杂波返回功率大于系统噪声功率,则雷达受杂波限制,信杂比必须等于或大于最小信噪比才能检测到目标,信杂比定义公式:
其中, 是脉冲持续时间, 是光速, 是目标距离, 是水平角波束宽度, 是俯仰角波束宽度, 是雷达横截面积, 是反向散射系数。信杂比提高需要窄脉冲和窄波束宽度,窄脉冲可以等效为高带宽,窄波束宽度可以等效为高角度分辨率。
A提高信号采样率是不行的,因为采样率过高反而会混入高频噪声,尤其是高频非平稳噪声,反而会影响目标检测。一般满足工程上一般采样率满足2~5倍信号的最高频率即可,不需要太高。
杂波的功率有可能比目标还高,甚至淹没弱小目标。B单纯提高发射功率,杂波的功率也会提高,水涨船高。
C提高信号带宽可以提高距离分辨率,距离分辨率越高,目标之间的差异越容易被发现,检测概率更高,同时否定了G。
D提高角度分辨率,同C,也是为了提高目标与杂波之间的差异,同时符合信杂比公式。
E提高脉冲重复频率,也就是降低脉冲重复周期,也就是提高最大不模糊速度,目标速度越大,越容易与杂波区分,当速度小于速度分辨率,则一定不能被检测出来。所以,为了尽可能地提高检测概率,必须同时在杂波抑制和2D-FFT中对距离维和速度维进行高分辨率处理。
F增加积累时间,比如多个脉冲对消可以抑制杂波(如MTI),同时也能改善速度分辨率,弥补E选项的不足。
参考论文:一种基于FMCW雷达的慢速目标检测自适应滤波器 (rhhz.net)
从FMCW毫米波雷达系统的性能参数理解4D成像毫米波雷达的设计思路
本问题读者如果存在疑问,欢迎提出,答案仅作参考。
4、关于提升雷达作用距离以下说法正确的是
A. 增大天线增益
B. 提升雷达的发射功率
C. 增大雷达带宽
D. 增加雷达脉冲数目
解析:根据雷达方程,A可以,B也可以,C单纯增加带宽对提升雷达作用距离没有用。D增加雷达脉冲数目可以增加脉冲积累的时间Tmeas=NTc,换句话说就是脉冲积累。
5、MUSIC算法称为多信号分类算法(Multiple Signal classification)。MUSIC算法的基本思想是将输出数据的协方差矩阵进行特征分解,从而得到与信号分量相对应的信号子空间和信号分量相正交的噪声子空间,然后利用这两个子空间的正交性来估计信号的入射方向,以下对于MUSIC算法的描述错误的是:
A. 该算法可以突破瑞丽限的要求实现高分辨率,高精度
B. 该算法对于天线阵列形状有要求,必须是等间距阵列
C. 该算法要求入射信号是不相干的
D. 信号子空间对应于较小的特征值,噪声空间对于较大的特征值
解析:MUSIC算法基本原理。MUSIC算法经常用在稀布阵上,不一定等间距MUSIC算法推导过程中就是假设信源相互独立,噪声服从高斯分布,且与信源信号相互独立噪声子空间对应较小的特征值,信号子空间对应较大的特征值。
6、关于DBF的角度分辨率以下说法正确的是
A. 与波长有关,波长越短角度分辨率越高
B. 阵列长度有关,阵列长度越长角度分辨率越高
C. 与阵元个数有关,阵元个数越多角度分辨率越高
D. 各方向能达到的角度分辨率是相同的
E. 与阵元间距有关,阵元间距越大角度分辨率越高
解析:DBF和FFT测角效果一致,如文章雷达算法 | 车载毫米波雷达DOA估计综述(附MATLAB算法仿真)
故ABCE的说法是对的,如下公式:
雷达的角分辨率与雷达的波长成反比,与天线的直径或者叫孔径成正比,就是说波长越长,分辨率越低,孔径越大,分辨率越高。
理论上,角分辨力由阵列主波束3dB宽带决定。
7、在噪声背景中进行目标检测时,为了提高目标检测性能,可以
A. 提高信号采样率
B. 提高发射功率
C. 提高信号带宽
D. 提高角度分辨率
E. 提高脉冲重复频率
F. 增加积累时间
G. 提高信号时宽
解析:烟雾弹题,和前面那个杂波背景下容易搞懵,这个时候不要慌,要去分析杂波和噪声的定义、特征、区别,以及从理论出发验证,都是纸脑虎。
两个思路:提高信噪比和加强目标信号。
A不行,上面分析过了。B可以,因为提高发射功率从雷达方程角度讲,可以提高信噪比,如下所示:
C可以提高距离分辨,D提高角度分辨,都是有利于目标检测的。E可以提高最大不模糊速度,同时也会提高雷达的平均功率,在相同时间内照射目标的脉冲数更多,可以通过积累改善信噪比。
F可以通过脉冲积累提高信噪比。G增加信号时间宽度,反而会在接收机中增加噪声能量。
8、关于卡尔曼滤波器,以下说法正确的是
A. 卡尔曼滤波器给出了协方差矩阵的准确测量,能够更好的实现波门的关联处理
B. 卡尔曼滤波器增益的动态计算意味着该滤波器可以用于多种机动目标环境
C. 卡尔曼滤波器的增益不会根据检测历史而自适应的改变
D. 卡尔曼滤波器使得部分补偿误相关和误关联的影响成为了可能
解析:卡尔曼滤波分为三个步骤,即预测、实测和修正。答案为:ABD。
9、请给出如下所述信号的信号表达式或近似表达式
1)雷达发射线性调频信号,该信号带宽为B,脉冲宽度为t,载频为fc;
2)上述发射信号从距离为R处目标反射的回波信号:
3)若有N个接收阵元,各阵元可距为d,一目标位于距离为R,角度为a的位置(与阵列法线夹角),请给出该目标回波经过解调后各阵元基带回波的信号形式:
4)在2)中的回波信号与发射信号差频后的信号的近似表达式。
解析:见链接https://zhuanlan.zhihu.com/p/510398532
10、已知雷达发射信号时宽为T,带宽为B,信号重复周期为T,采样率为fs,波长为入,积累周期数为N。
1)若上述雷达为LFMCW雷达体制,给出该雷达的最大不模糊距离、距离分辨率,测速范围以及速度分辨率;
2)若该雷达为脉冲多普勒体制,给出该雷达的最大不模糊距离、距离分辨率、测速范围以及速度分辨率;
解析:见链接https://zhuanlan.zhihu.com/p/510398532
11、 已知雷达发射信号频谱为X(f),时宽为T,带宽为B,采样率为fs,载频为fc,请给出距离为R的目标回波信号频谱以及该回波信号经过匹配滤波后的频谱。
解析:见链接https://zhuanlan.zhihu.com/p/510398532
12、已知场景中无相对运动物体,雷达一个周期的回波为X(t),频谱为X(f),信号周期为T,波长为入,一共接收N个周期的回波信号。
1)对N个接收的回波信号进行慢时间的N点FFT,请给出零多普勒通道信号的时域表达式及其频谱
2)若对N个接收的回波信号进行慢时间2N点的FFT,请给出零多普勒通道信号的时域表达式及其频谱
3)若信号周期调整为2T,接收N个回波信号并进行慢时间的N点FFT,请给出零多普勒通道信号的时域表达式及其频谱
解析:见链接https://zhuanlan.zhihu.com/p/510398532
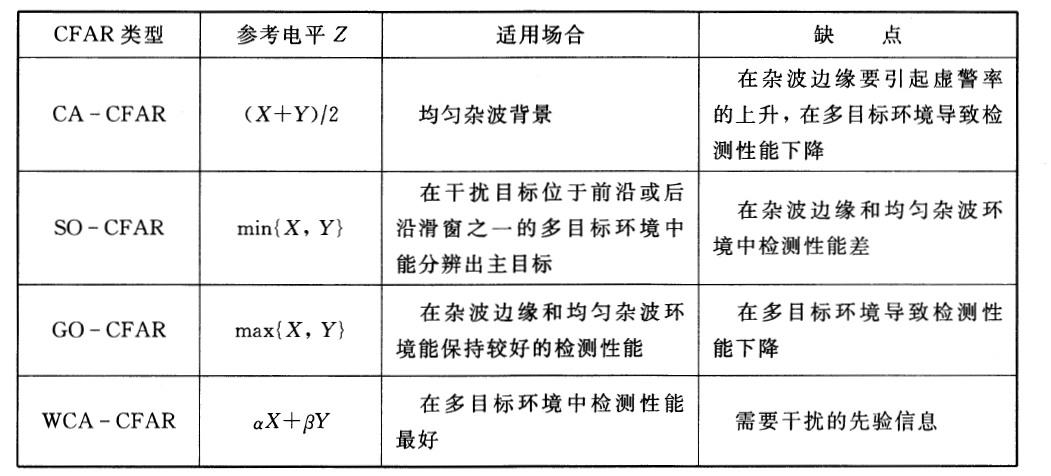
13、 目前雷达目标检测中常用的检测算法有单元平均恒虚警(CA-CFAR),有序统计量恒虚警(OS-CFAR)以及最大最小恒虚警(SO/GO-CFAR),试说明以上几种算法的优劣。
CA-CFAR 计算逻辑简单,算法复杂度低,在工程中被广泛应用。但是 CA-CFAR 只在均匀环境中性能表现优秀,在多目标及杂波边缘环境中无法消除临近目标与空域杂波能量突变对算法检测性能的影响, 因而检测概率损失严重、虚警概率偏离预设值。
GO-CFAR可以有效应对杂波边缘环境中能量突变的影响,但是在多目标环境的应用中检测概率损失严重,性能恶化。
SO-CFAR可以有效地解决多目标环境中临近目标对于算法性能的影响, 在多目标环境的应用中性能表现优异,但是在应对杂波边缘环 境时, 该算法的虚警概率恶化严重。
OS-CFAR在多目标与杂波边缘环境中检测性能较好,但是在均匀环境中检测性能有一定损失。
这里推荐看《现代雷达系统分析与设计》一书:
【本期结束】
本文不涉及任何利益,都是空闲时候的个人心得和体会,仅供参考。目前我的工作经验尚浅,还有很多内容需要学习,如果还有没有说到或者不全面的地方,还请指正,感谢大家。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 雷达
-
NVIDIA 校招 | 亚洲研发中心在线笔试即将开考!2023-10-08 1466
-
NVIDIA 2024 校招 | 抢先查看你的在线笔试时间!2023-09-22 1937
-
往年 | 大疆雷达算法校招笔试题目解析2023-05-08 4026
-
华为2016年硬件工程师校招试题及答案2021-05-12 1503
-
大疆校招笔试题(软件)2017-11-21 7066
-
2014全志数字IC笔试题目2016-12-14 1805
-
C语言程序设计_宇视科技2015年招聘笔试题2016-01-08 1140
-
2014校招笔试题2015-11-02 868
全部0条评论

快来发表一下你的评论吧 !
