

开关电源环路稳定性分析(七)
描述
大家好,这里是大话硬件。
在前面的文章中,已经分析了控制级和功率级的传递函数,这一节咱们来分析反馈级的传递函数。
在分析反馈网络的传递函数之前,我想,应该有几个问题需要做一下介绍。
1. 功率级和控制级传递函数说明了什么?
根据前面的传递函数的表达式可知,带有两个阻抗L,C元件的传递函数,在转折频率以后,在增益上斜率为-2,表现为-40dB/dec的特性,在足够宽的频率范围内相位偏移达到-180°。
这样的性质说明两个特点:
(1)传递函数会以较快的频率(-2斜率)穿过0dB;
(2)相位会到达-180
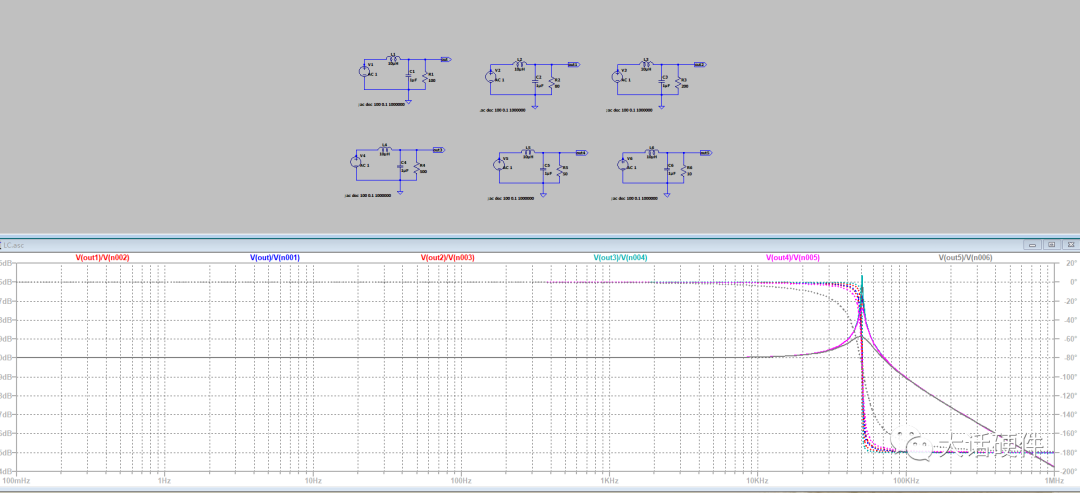
下面仿真的不同负载电阻条件下,LCR 电路的波特图,从结果可以看出,只要是LC的值确定,转折频率确定,谐振峰的大小和负载电阻有关系。 在转折频率处相位会有突变,增益会以-40dB/dec的特性降低。
2.零点和极点的作用
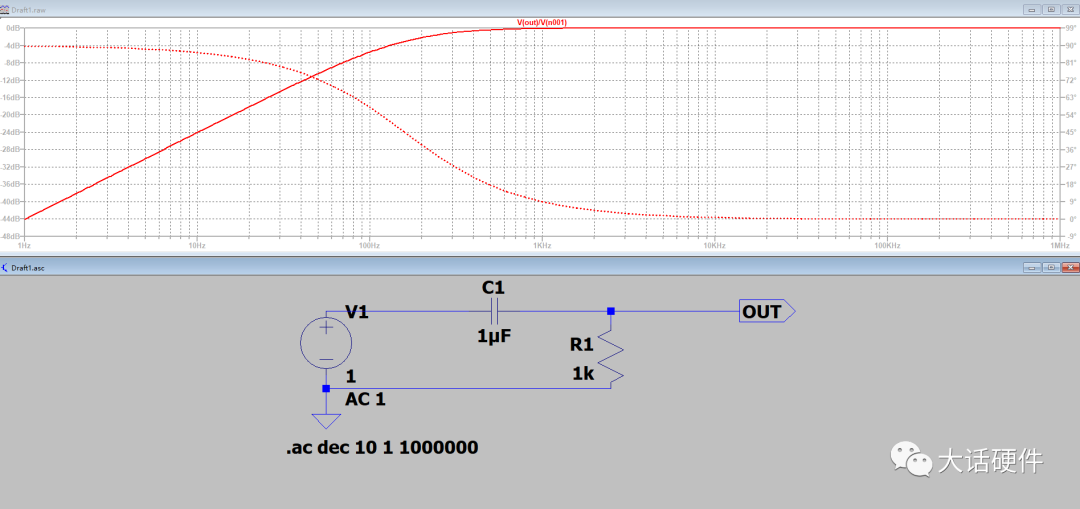
左边平面零点会使增益以+20dB的斜率上升,相位增加90度。
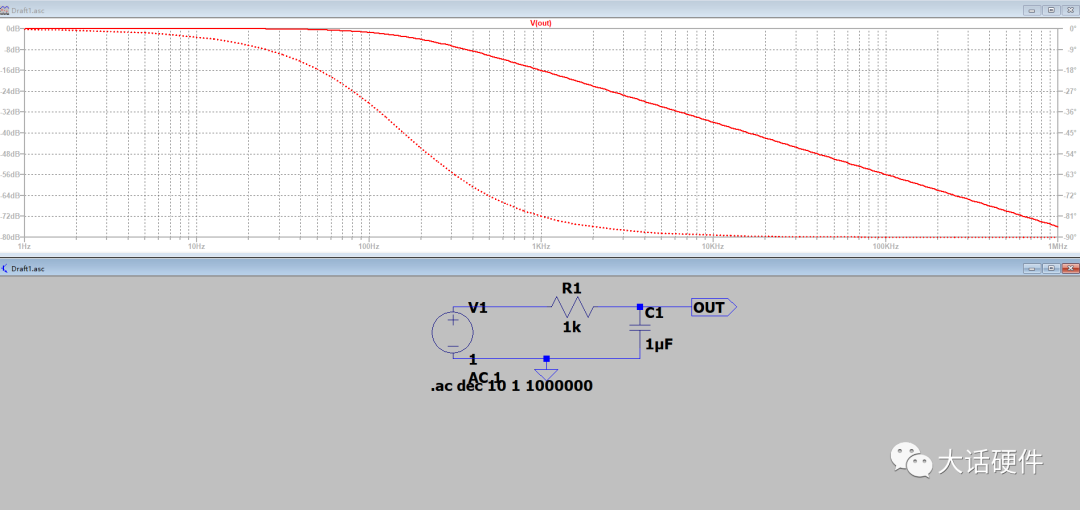
左边平面的极点会使增益以-20dB斜率下降,相位减少90°
3. 什么样的开关电源是稳定可靠的?
讲了这么久,我们一直在说开关电源要稳定,到底什么样的电源才算是稳定的呢?
在此之前其实也给大家分析过,判断一个电源稳定与否,除了测试,我们就只能使用数学的工具来判断是否稳定。
因此,在评定开关电源稳定性时,会用下面这两个条件来评定开关电源是否稳定。
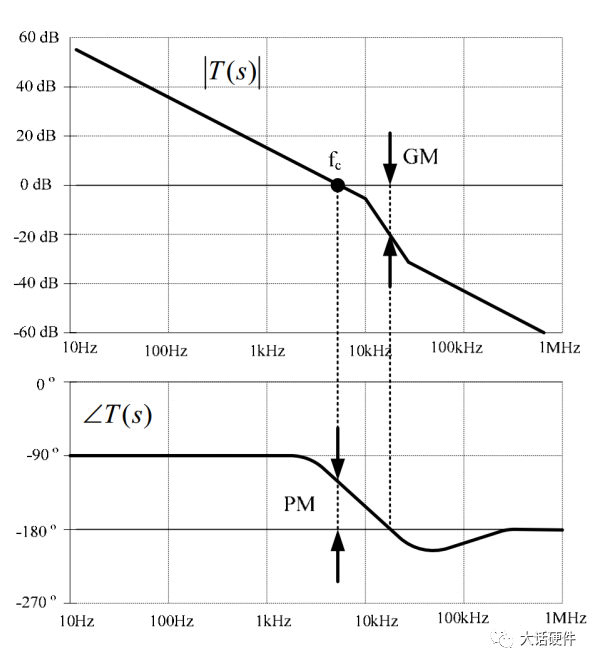
增益裕度:GM一般需6dB的增益裕量;
相位裕度:PM一般需要45°的相位裕量;
斜率要求:为防止-40dB/dec增益斜率,相位变化太快,增益曲线穿过0dB的时候,最好是以-20dB/dec;
从上面3个条件可以看出,增益有要求,斜率有要求,相位也有要求。
上面的要求,是不是有点像大家看到的找对象要求:身高>180,体重<150,一般这两条很难满意,往往会再加上几条。
开关电源也是这样,其实增益裕度和相位裕度已经可以保证电源稳定,但是环境中存在的不确定性太多,增加的条件越多,开关电源就越稳定。
4. 开关电源环路补偿其实不算难
分析到这里,其实环路补偿这件事,说难,也不难,说简单也很难。
简单的原因:
首先,我知道判断一个电源是否稳定的要求是什么,上面列出了3条;
其次,我求出了控制级和功率级的传递函数,剩下就是用补偿环路补偿一下;
最后,使整个环路保持稳定,满足要求。
说难的原因:
开关电源的拓扑种类众多,补偿环路形式多样;
开关电源是模拟和数字的混合电路,不同需求,环路补偿要求不一样;
目前没有通用的设计,设计需要差异化;
像不像还在找对象的你,说难吧,你就是需要认识一个异性而已; 说不难吧,要认识自己满意的,是不是对你来说,又有些难.
5.电压型和电流型补偿网络
上面通过实际的分析和拆解,把电源环路分析这件事看成是实际和标准之间的差异,是不是简单很多。
目前用的比较多的环路补偿主要有电压型和电流型两种,其中电压型有3种,分为I型,II型,III型,电流的也有3种和电压的基本一致。
电压型补偿拓扑如下:
电流型补偿拓扑如下:
6. 三种类型电压补偿网络介绍
在往下继续读之前,我想你肯定在很多场合听过电压补偿有3型,分别是I型,II型,III型。 下面我们对3个类型进行详细分析。
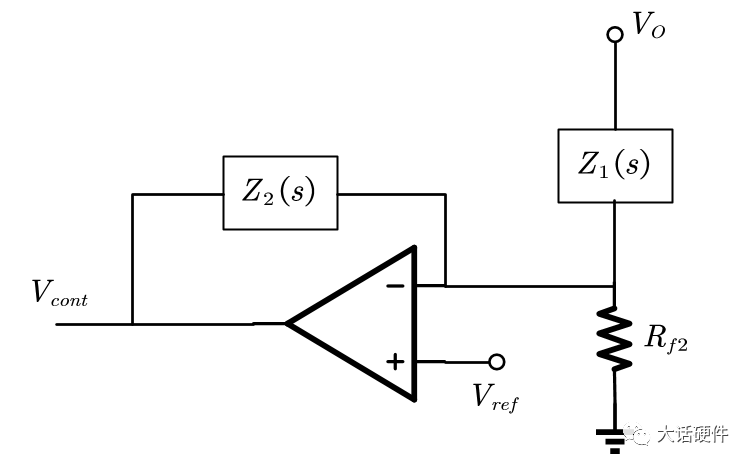
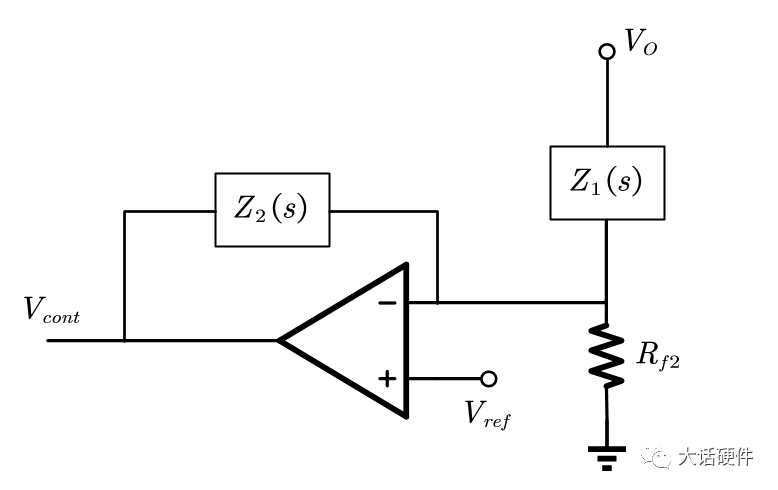
I型
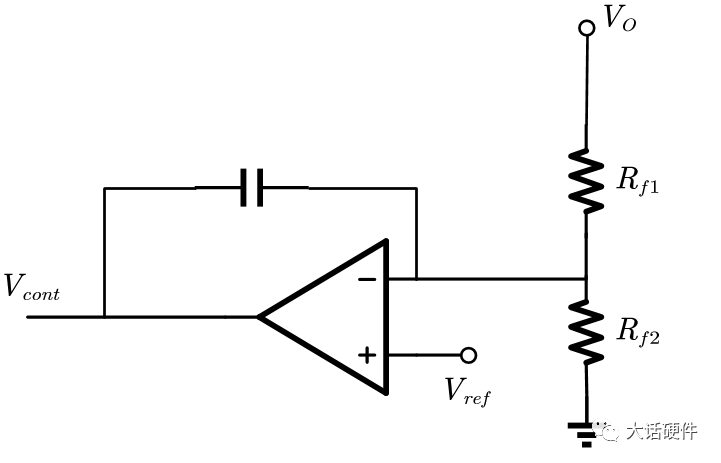
下面这个拓扑就是I型,推导它的传递函数

在推导传递函数时,需要区分直流和交流分析,直流分析的时候,反相端电压是Vref,但是进行交流分析的时候,直流电压等效为0,这个位置我在刚学习的时候,也有些困惑,需要重点理解一下。
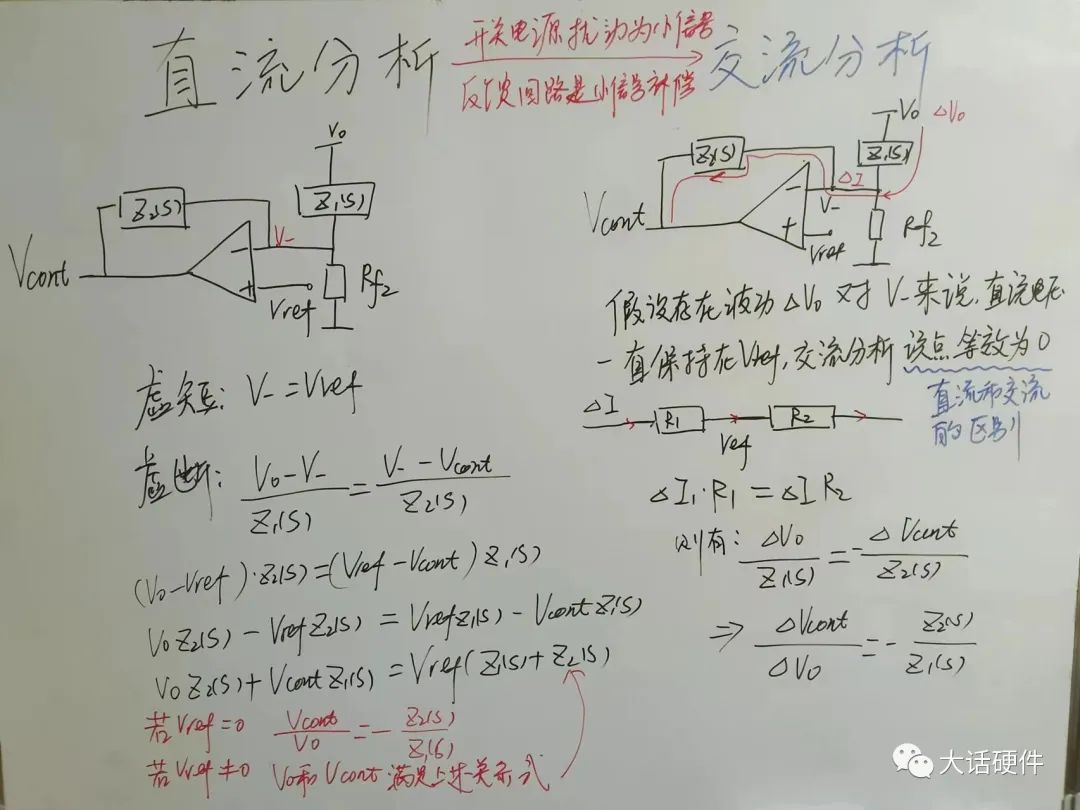
所以I型的传递函数为:
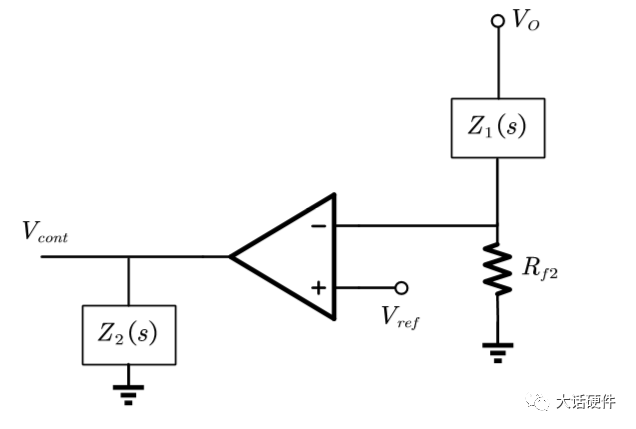
在实际使用的时候,I型的补偿网络在Z2的位置会放置电容,在Z1的位置会放置电阻。
根据零极点的定义,可知I型补偿网络提供了一个零极点,穿越频率为:
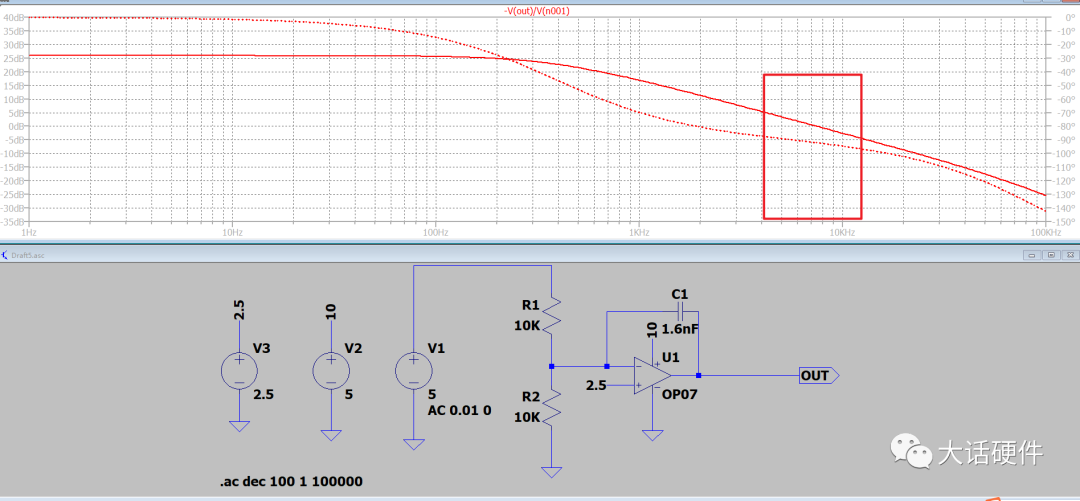
在穿越频率处提供了-90°的相位,增益以-1的斜率穿过0dB
上述仿真的现象和理想中零极点不一样,考虑是LTspice器件模型非理想,换软件仿真
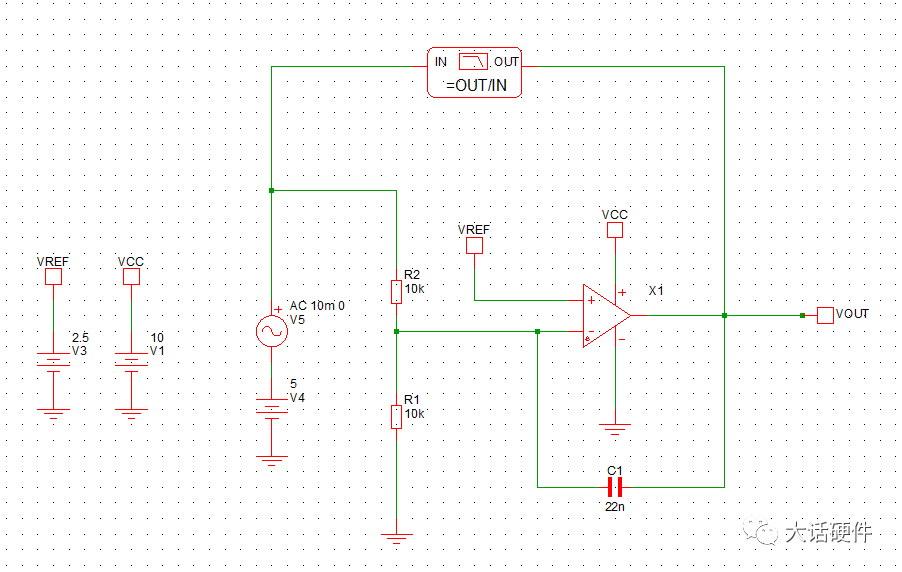
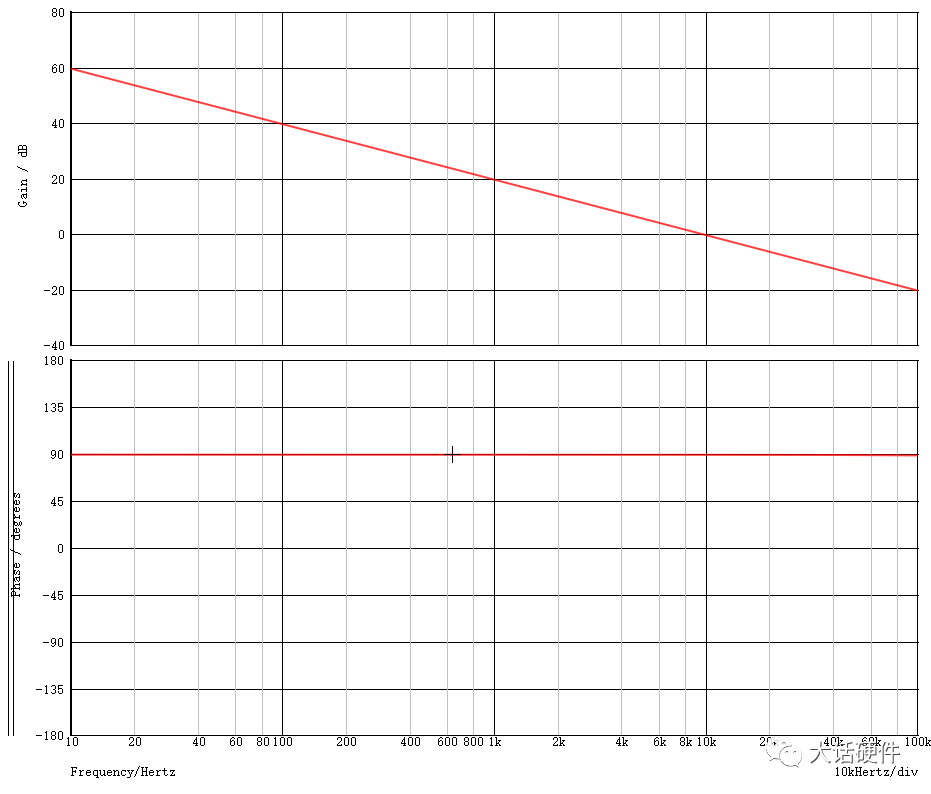
零极点在穿越0dB的时候,斜率-1,相位-90°,这个看起来更符合零极点的波特图。
II型补偿网络
传递函数:

可见II型的补偿网络提供了一个零点,一个零极点,一个极点。
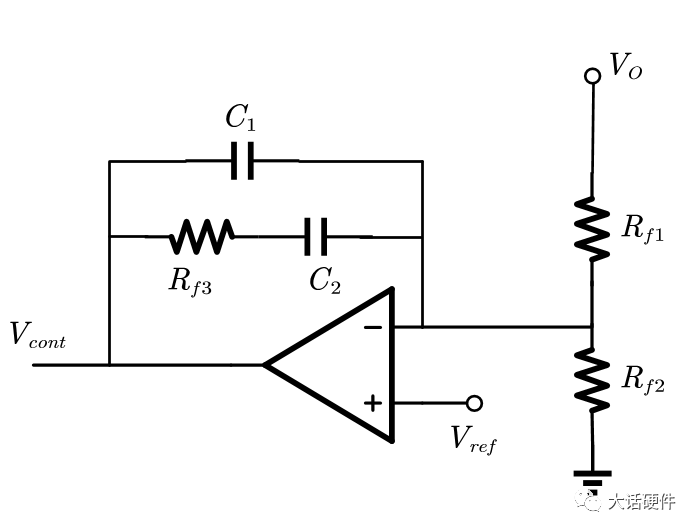
III型补偿网络
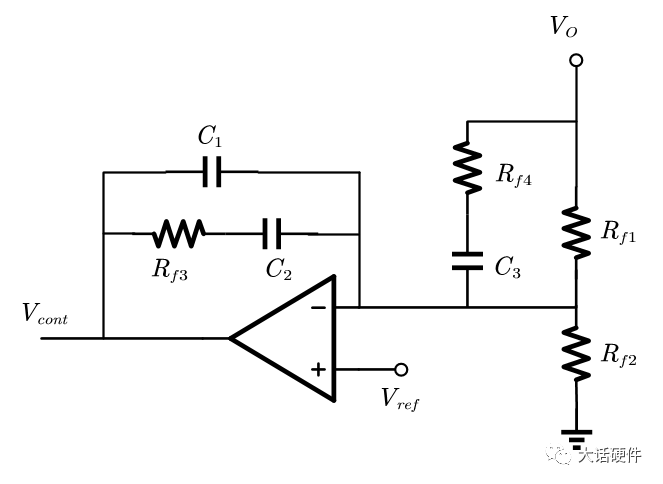

可见III型的补偿网络提供了两个零点,一个零极点,两个极点。
以上就是电压型不同类型的传递函数,下一节分析电流型补偿网络的传递函数。
目前这些内容在一起可能会让大家有些不知所措,不要担心,后面会把前面所有的内容串联起来,总结出一套环路补偿的步骤供大家使用。
-
开关电源环路稳定性分析(一)2022-11-15 10446
-
开关电源环路稳定性分析(三)2022-11-21 5166
-
开关电源环路稳定性分析(四)2022-11-28 4267
-
LDO稳定性分析2012-08-16 3249
-
开关电源环路稳定性测量问题2018-05-23 6114
-
开关电源增益稳定性分析2018-10-22 2213
-
电源环路稳定性评价方法2018-11-08 3987
-
开关电源环路稳定性分析2020-05-31 4145
-
关于电源/负载电路组合的稳定性分析2021-05-11 2456
-
开关电源环路稳定性分析(二)2022-11-22 6898
-
开关电源环路稳定性分析(五)2022-12-06 7657
-
单端反激式开关电源的稳定性分析2010-06-12 673
-
多环开关电源系统的稳定性分析2011-12-29 638
-
环路稳定性分析2016-05-03 933
-
开关电源环路稳定性分析(八)2023-05-09 3730
全部0条评论

快来发表一下你的评论吧 !
