

浅谈KUKA机器人制动-BRAKE V4.26
机器人
描述
机器人的制动
参数则使用编程的轨迹或轴加速度值制动运动。作用同STOP键。机器人不离开运动轨迹。
应在出现一个事件后立即停住机器人。
有两个制动斜坡可供选择(STOP 1 和 STOP 2)。
机器人停下时,中断程序先继续运行。
中断程序一结束,已开始的机器人运动就将继续进行。
句法:
1. BRAKE:STOP 2
2. BRAKE F:STOP 1
BRAKE 只能用于一个中断程序中。
如果处理中断例程的时间短于主程序中制定的轨迹规划,则机器人可不中断而继续运行。如果中断例程所需的时间长于规划的轨迹,则机器人在其轨迹规划的终点停下,中断例程一执行完毕,它将继续运行。
不允许使用用于初始化 (INI ) 或运动(例如 PTP 或 LIN ...)的联机表单。处理时这些表单将引发出错信息。
机器人被用 BRAKE 停住,中断例程结束时它将沿着主程序中计划的轨迹继续运行。
机器人被用 BRAKE 停住,在中断例程中运行。中断例程结束后将继续沿着主程序中定义的轨迹运行。
使用指令
BRAKE
对于不带 F 的 BRAKE 指令,机器人用斜坡停止制动 (沿轨迹)。通过连续的倍率减小缓慢制动同步机器人轴并且不离开编程设定的轨迹。应用:在高速时柔和地停止
例:
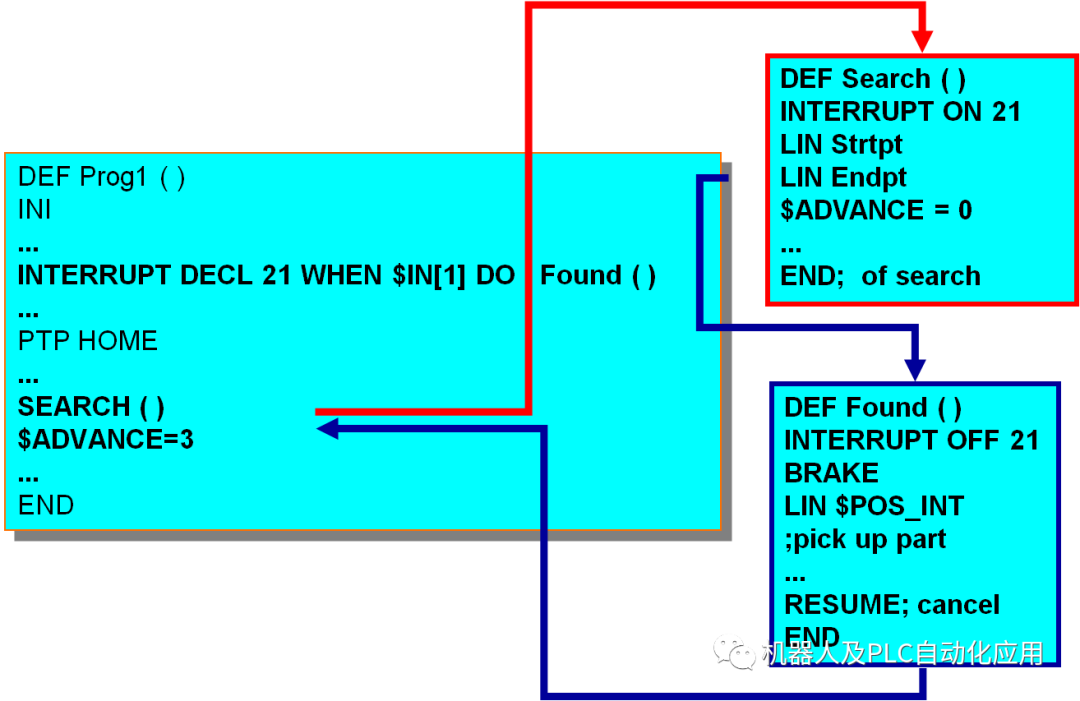
DEF FOUND()
INTERRUPT OFF 21
BRAKE
LIN $POS_INT
... ;机器人抓取找到的零件。
RESUME
END
由于制动过程,机器人略微远离触发了中断的位置。LIN $POS_INT 将导致机器人返回到触发了中断的位置上。
BRAKE F
(快速制动)可以实现一个最短距离的制动。在保持轨迹正确的前提下,机器人以尽可能短的时间停止。
例:
...
DEF STOP_FAST()
BRAKE F
PTP $POS_INT:{x -10}
...
BRAKE FF
对于带 FF 的 BRAKE 指令,机器人用转速停止制动 (不沿轨迹)。停止所有同步和异步机器人轴并同时离开编程设定的轨迹。在低速范围内,可以达到特别短的制动行程。应用:在低速时极快停止
例如:
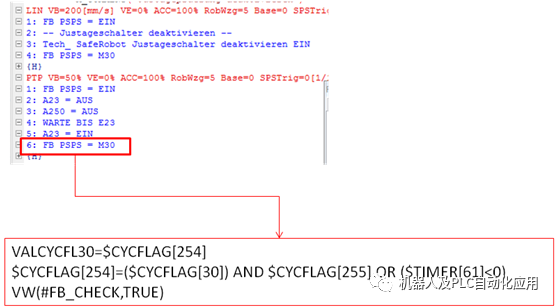
机器人运动过程等待条件FB SPS的结合BRAKE深入分析
DEF FB_CHECK ()
IF $CYCFLAG[254] AND ($TIMER[61]<0)THEN
BRAKE如果有M254 还有T61 就停止移动轨迹-
IF $PRO_MODE<>#BSTEP THEN -程序不是单步-
WAITFOR ($TIMER[61]>0) -等待T61在单步后由-300转而大于0
ENDIF
ENDIF
$LOOP_CONT=TRUE-循环控制当$LOOP_CONT=False时是开启了模拟指令-
WAITFOR $CYCFLAG[254] OR ( NOT ($LOOP_CONT) AND ($MODE_OP<>#EX))
等待M 254 –或者在手动时模拟信号-
$LOOP_CONT=TRUE
END
BRAKE指令仅可以在中断程序中使用,在其它程序中使用则会导致一个错误引起的停止。
BRAKE 指令不必在调用后直接使用,可位于中断程序的如何位置。效果与执行该指令时被中断的程序是否仍然正在执行运动有关。如果机器人是不运动的,则该指令无效果。使用编程的制动模式使被中断程序中仍然在进程中的运动被停止。尽管都可以停止程序执行,机器人暂停后中断程序都可以继续处理接下来的指令,BRAKE命令也不能用HALT语句代替。
返回被中断的程序后,中断程序中被BRAKE或BRAKE F 停止的运动重新开始。
$BRAKE_SIG
通过系统变量 $BRAKE_SIG 可以显示制动器的状态。$BRAKE_SIG 的值为位数组:位 0 相当于 A1,位 6 相当于 E1。
位 n = 0:制动器已合上。
位 n = 1:制动器打开。
编辑:黄飞
-
KUKA机器人编程说明(英文)2025-03-07 495
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3870
-
KUKA机器人制动-BRAKE V5.20操作程序2023-05-22 2642
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1779
-
KUKA机器人制动-BRAKE2022-03-11 3538
-
KUKA机器人伺服驱动模块维修2021-09-17 1868
-
库卡机器人MGV电源模块维修2021-09-08 1860
-
工业机器人组成结构相关资料分享2021-07-05 2712
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8005
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10892
-
KUKA机器人问题解答2019-07-15 2610
-
求KUKA机器人控制柜三维模型2016-04-18 6440
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2271
-
KUKA重型机器人2015-02-03 8294
全部0条评论

快来发表一下你的评论吧 !
