

PLC经典实例:液体混合装置的控制线路与程序
电子说
描述
两种液体混合装置如图5-5所示,YV1、YV2分别为A、B液体注入控制电磁阀,电磁阀线圈通电时打开,液体可以流入,YV3为C液体流出控制电磁阀,H、M、L分别为高、中、低液位传感器,M为搅拌电动机,通过驱动搅拌部件旋转使A、B液体充分混合均匀。
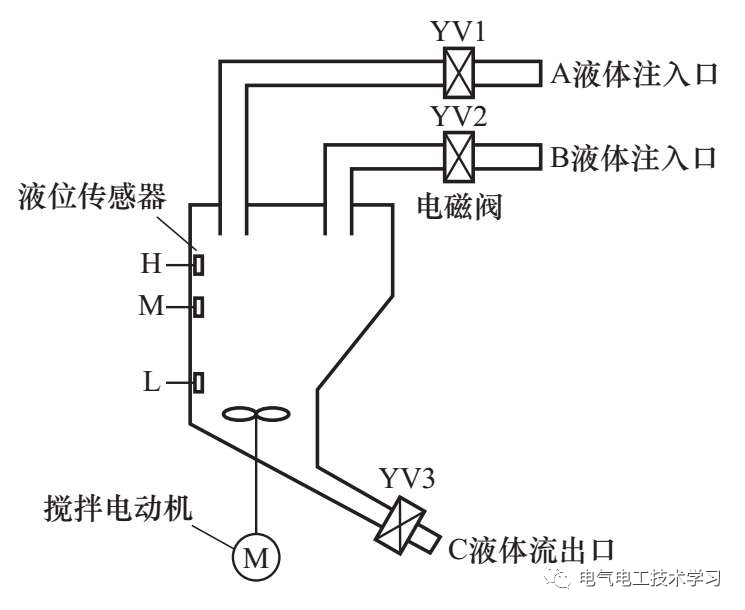
图5-5 两种液体混合装置
液体混合装置控制要求
①装置的容器初始状态应为空的,三个电磁阀都关闭,电动机M停转。按下启动按钮,YV1电磁阀打开,注入A液体,当A液体的液位达到M位置时,YV1关闭;然后YV2电磁阀打开,注入B液体,当B液体的液位达到H位置时,YV2关闭;接着电动机M开始运转搅拌20s,然后YV3电磁阀打开,C液体(A、B混合液)流出,当C液体的液位下降到L位置时,开始20s计时,在此期间C液体全部流出,20s后YV3关闭,一个完整的周期完成。以后自动重复上述过程。
②当按下停止按钮后,装置要完成一个周期才停止。
③可以用手动方式控制A、B液体的注入和C液体的流出,也可以手动控制搅拌电动机的运转。
确定输入/输出设备,并为其分配合适的I/O端子
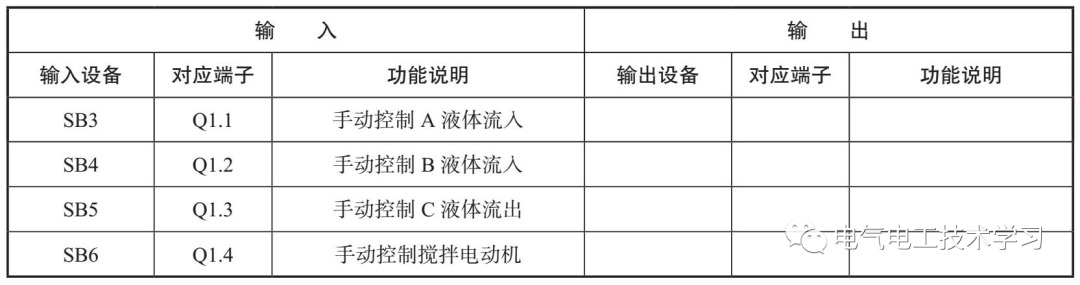
液体混合装置控制采用的输入/输出设备和对应的PLC端子见表5-2。
表5-2 液体混合装置控制采用的输入/输出设备和对应的PLC端子

绘制控制线路图
图5-6所示为液体混合装置的PLC控制线路图。
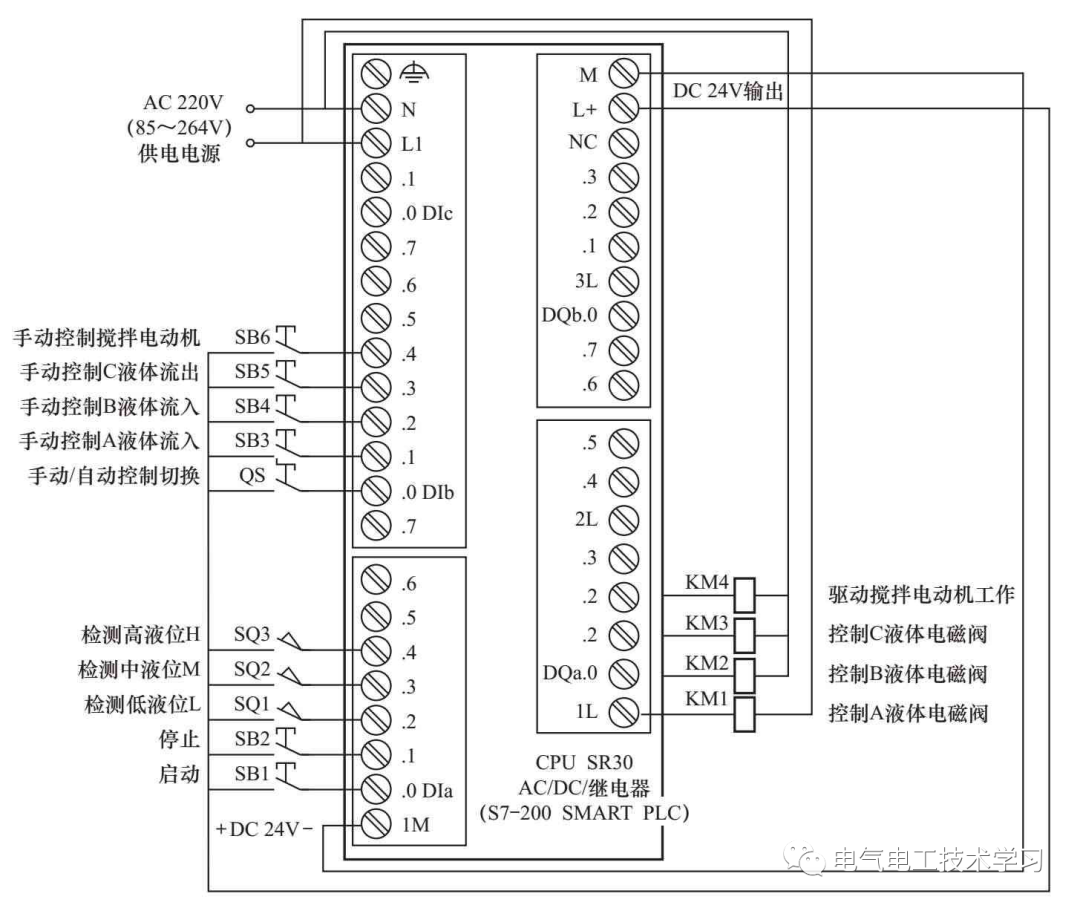
图5-6 液体混合装置的PLC控制线路图
编写PLC控制程序
1)绘制状态转移图
在编写较复杂的步进程序时,建议先绘制状态转移图,再按状态转移图的框架绘制梯形图。STEP 7-Micro/WIN SMART编程软件不具备状态转移图绘制功能,因此可采用手工或借助一般的图形软件绘制状态转移图。
图5-7所示为液体混合装置控制的状态转移图。
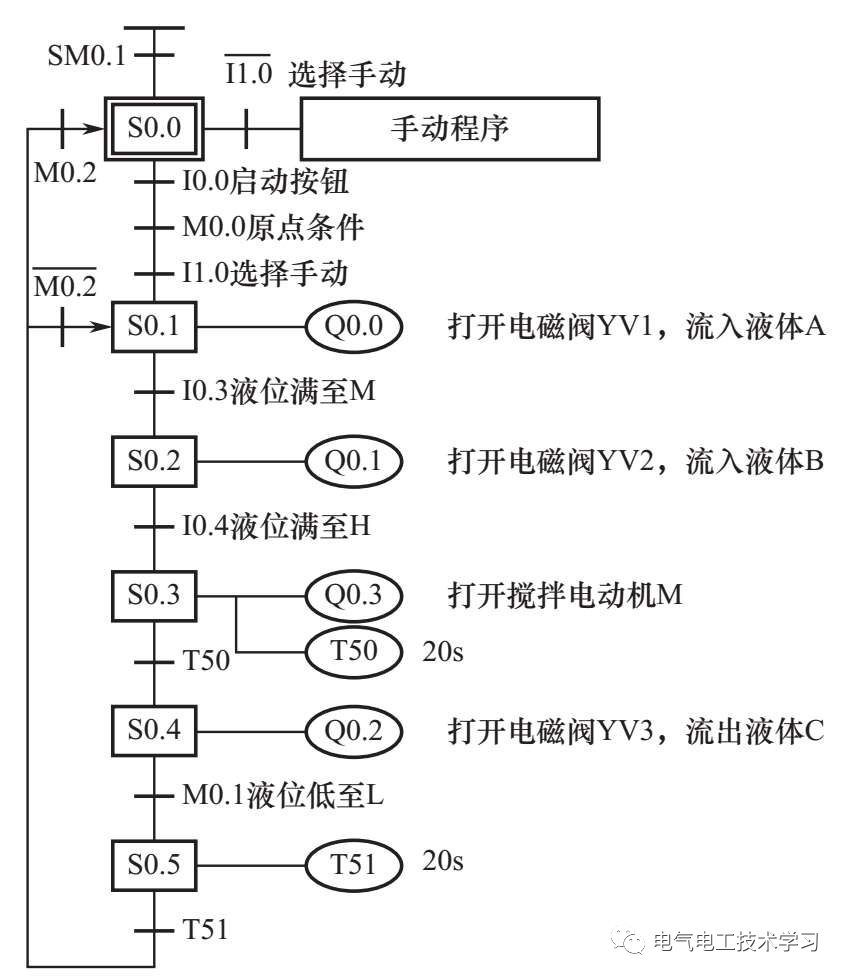
图5-7 液体混合装置控制的状态转移图
2)绘制梯形图
启动编程软件,按照图5-7所示的状态转移图编写梯形图程序,如图5-8所示。
下面对照图5-6所示控制线路来说明图5-8所示梯形图的工作原理。
液体混合装置有自动和手动两种控制方式,它由开关QS来决定(QS闭合——自动控制;QS断开——手动控制)。要让装置工作在自动控制方式,除了开关QS应闭合外,装置还须满足自动控制的初始条件(又称原点条件),否则系统将无法进入自动控制方式。装置的原点条件是L、M、H液位传感器的开关SQ1、SQ2、SQ3均断开,电磁阀YV1、YV2、YV3均关闭,电动机M停转。
(1)检测原点条件。
图5-8所示梯形图中的[1]程序用来检测原点条件(或称初始条件)。在启动自动控制前,若装置中的液体未排完,或者电磁阀YV1、YV2、YV3和电动机M有一个或多个处于得电工作状态,即不满足原点条件,系统将无法进入自动控制工作状态。
程序检测原点条件的方法:若装置中的C液体位置高于传感器L→SQ1闭合→[1]I0.2常闭触点断开,M0.0线圈无法得电;或者某原因让Q0.0~Q0.3线圈中的一个或多个处于得电状态,会使电磁阀YV1、YV2、YV3或电动机M处于通电工作状态,同时会使Q0.0~Q0.3常闭触点断开而让M0.0线圈无法得电;[6]M0.0常开触点断开,无法对状态继电器S0.1置位,也就不会转移执行从S0.1程序段开始的自动控制程序。
如果是因为C液体未排完而使装置不满足自动控制的原点条件,可手工操作SB5按钮,使[7]I1.3常开触点闭合,Q0.2线圈得电,接触器KM3线圈得电,KM3触点(图5-6中未画出)闭合,接通电磁阀YV3线圈电源,YV3打开,将C液体从装置容器中放完,液位传感器L的SQ1断开,[1]I0.2常闭触点闭合,M0.0线圈得电,从而满足自动控制所需的原点条件。
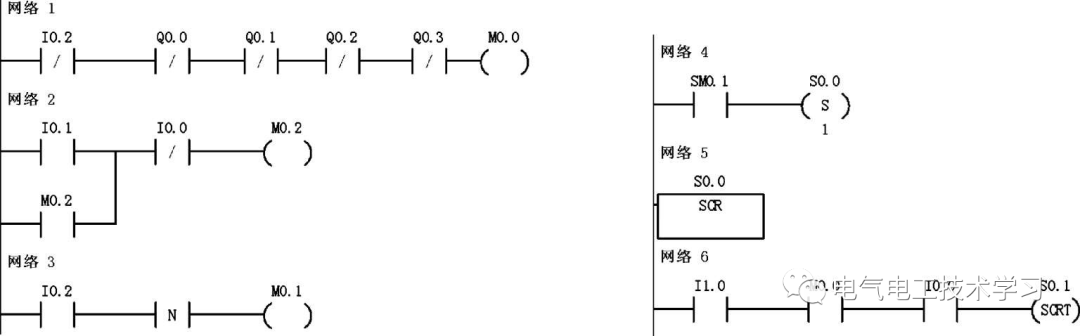
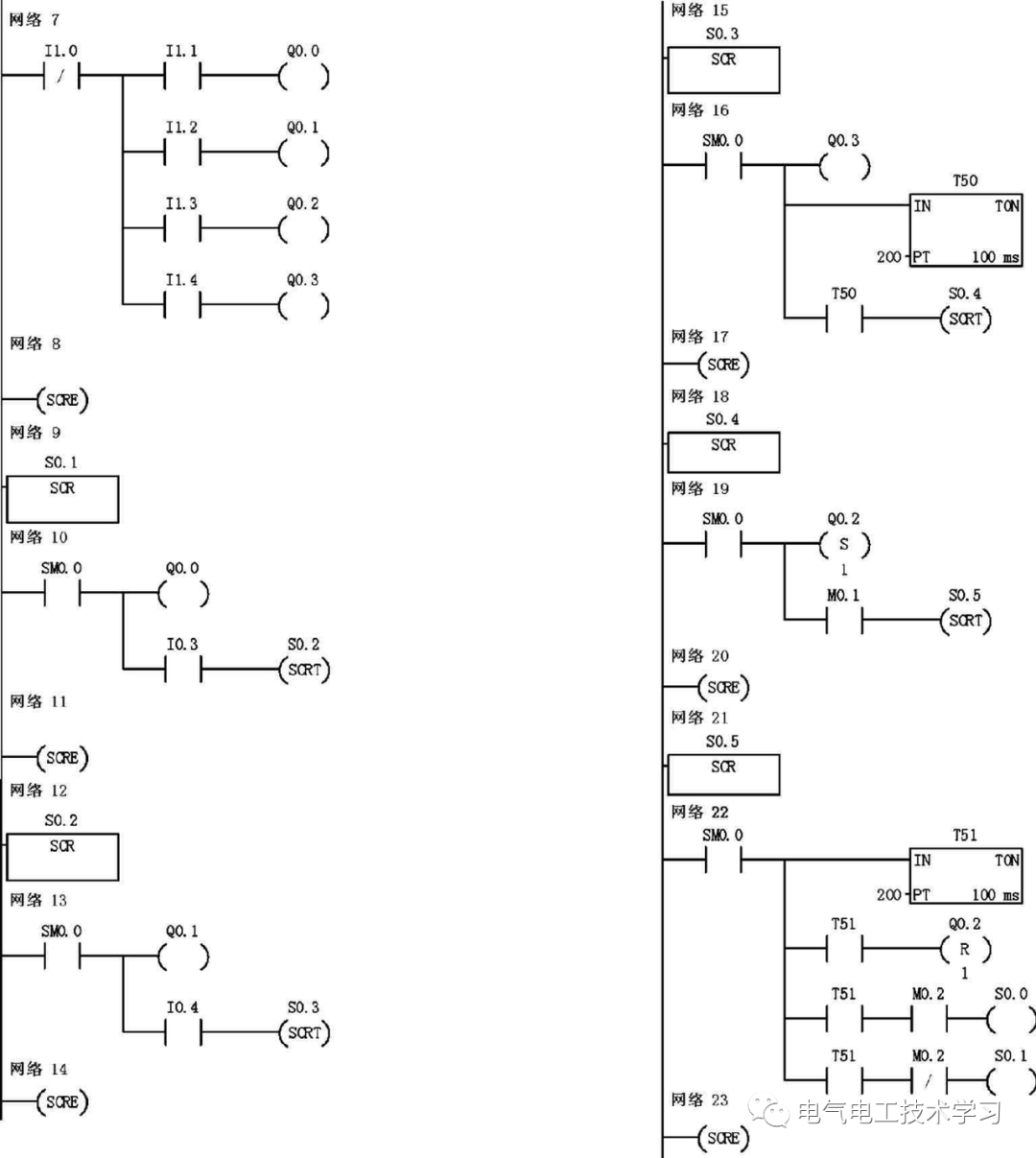
图5-8 液体混合装置控制梯形图程序
(2)自动控制过程。
在启动自动控制前,需要做一些准备工作,包括操作准备和程序准备。
①操作准备:将手动/自动切换开关QS闭合,选择自动控制方式,图5-8 中[6]I1.0常开触点闭合,为接通自动控制程序段做准备;[7]I1.0常闭触点断开,切断手动控制程序段。
②程序准备:在启动自动控制前,[1]程序会检测原点条件,若满足原点条件,则辅助继电器线圈M0.0得电,[6]M0.0常开触点闭合,为接通自动控制程序段做准备。另外,在PLC刚启动时,[4]SM0.1触点自动接通一个扫描周期,“S S0.0, 1”指令执行,将状态继电器S0.0置位,使程序转移至S0.0程序段,也为接通自动控制程序段做准备。
③启动自动控制:按下启动按钮SB1→[6]I0.0常开触点闭合→执行“SCRT S0.1”指令,程序转移至S0.1程序段→由于[10]SM0.0触点在S0.1程序段运行期间始终闭合,Q0.0线圈得电→Q0.0端子内硬触点闭合→KM1线圈得电→主电路中KM1主触点闭合(图5-6中未画出主电路部分)→电磁阀YV1线圈通电,阀门打开,注入A液体→当A液体高度到达液位传感器M位置时,传感器开关SQ2闭合→[10]I0.3常开触点闭合→执行“SCRT S0.2”指令,程序转移至S0.2程序段(同时S0.1程序段复位)→由于[13]SM0.0触点在S0.2程序段运行期间始终闭合,Q0.1线圈得电,S0.1程序段复位使Q0.0线圈失电→Q0.0线圈失电使电磁阀YV1阀门关闭,Q0.1线圈得电使电磁阀YV2阀门打开,注入B液体→当B液体高度到达液位传感器H位置时,传感器开关SQ3闭合→[13]I0.4常开触点闭合→执行“SCRT S0.3”指令,程序转移至S0.3程序段→[16]常ON触点SM0.0使Q0.3线圈得电→搅拌电动机M运转,同时定时器T50开始20s计时→20s后,定时器T50动作→[16]T50常开触点闭合→执行“SCRT S0.4”指令,程序转移至S0.4程序段→[19]常ON触点SM0.0使Q0.2线圈被置位→电磁阀YV3打开,C液体流出→当液体下降到液位传感器L位置时,传感器开关SQ1断开→[3]I0.2常开触点断开(在液体高于L位置时SQ1处于闭合状态),产生一个下降沿脉冲→下降沿脉冲触点为继电器M0.1线圈接通一个扫描周期→[19]M0.1常开触点闭合→执行“SCRT S0.5”指令,程序转移至S0.5程序段,由于Q0.2线圈是置位得电,故程序转移时Q0.2线圈不会失电→[22]常ON触点SM0.0使定时器T51开始20s计时→20s后,[22]T51常开触点闭合,Q0.2线圈复位→电磁阀YV3关闭;与此同时,S0.1线圈得电,[9] S0.1程序段激活,开始下一次自动控制。
停止控制:在自动控制过程中,若按下停止按钮SB2→[2]I0.1常开触点闭合→辅助继电器M0.2得电→M0.2自锁触点闭合,锁定供电;[22]M0.2常闭触点断开,状态继电器S0.1无法得电,[9]S0.1程序段无法运行;[22]M0.2常开触点闭合,当程序运行到[22]时,T51常开触点闭合,状态继电器S0.0得电,[5]S0.0程序段运行,但由于常开触点I0.0处于断开(SB1断开)状态,状态继电器S0.1无法置位,无法转移到S0.1程序段,自动控制程序部分无法运行。
(3)手动控制过程。
将手动/自动切换开关QS断开,选择手动控制方式→[6]I1.0常开触点断开,状态继电器S0.1无法置位,无法转移到S0.1程序段,即无法进入自动控制程序;[7]I1.0常闭触点闭合,接通手动控制程序→按下SB3,I1.1常开触点闭合,Q0.0线圈得电,电磁阀YV1打开,注入A液体→松开SB3,I1.1常闭触点断开,Q0.0线圈失电,电磁阀YV1关闭,停止注入A液体→按下SB4注入B液体,松开SB4停止注入B液体→按下SB5排出C液体,松开SB5停止排出C液体→按下SB6搅拌液体,松开SB6停止搅拌液体。
审核编辑:汤梓红
-
三种控制线路的工作原理2022-08-29 4901
-
PLC控制线路的快速检查法.doc2012-07-06 2239
-
基本控制线路2012-08-20 2722
-
多种液体水位自动混合控制程序设计与调试2009-06-14 1768
-
js经典程序实例2010-03-11 797
-
多种液体自动混合PLC控制2008-09-29 19221
-
双重互锁得正反转控制线路和自动往复控制线路2010-03-31 14602
-
CAD控制线路设计2016-05-06 1218
-
工业电气控制线路和PLC程序的逻辑设计法简介2017-10-24 1195
-
PLC外围线路和控制线路的故障查找及解决2019-10-18 9836
-
西门子PLC编程应用实例混合液体装置的自动控制2020-05-01 8522
-
详解简单的电机控制线路2020-10-01 4386
-
超声波控制线路板设计2022-12-26 994
-
4个PLC经典程序实例2023-03-14 4410
-
plc控制线路怎么接线步骤2024-07-01 3591
全部0条评论

快来发表一下你的评论吧 !
