

KUKA机器人高级编程中的"CHANNEL"的应用
描述
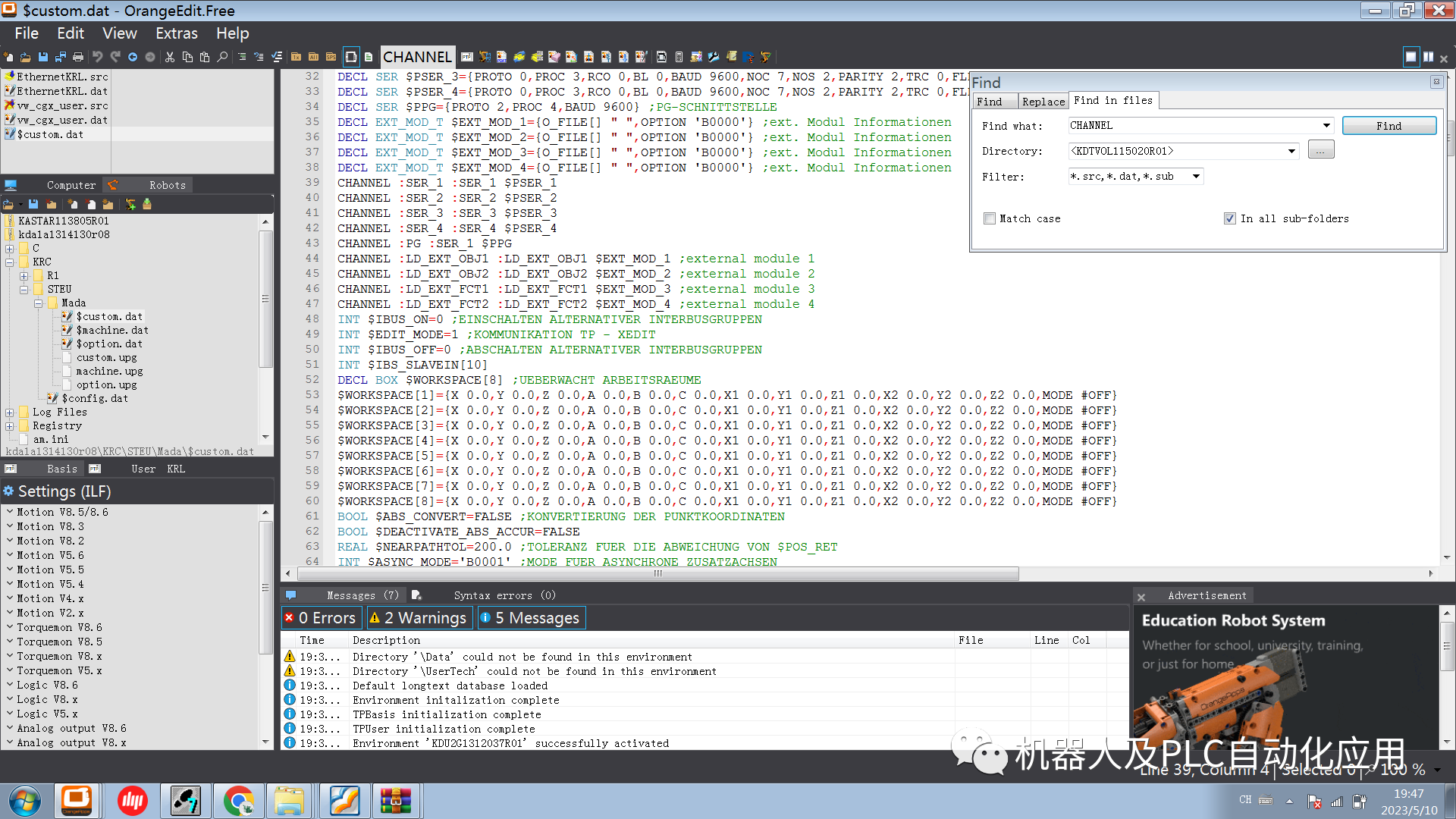
“CHANNEL”语句被用于声明输入和输出的信号名。
不需要对CHANNEL语句进行编程。它已经为文件$CUSTOM.DAT中的所有外部模块预定义。不过,为了便于理解,这里对该语句进行了解释。

机器人控制器包含两类界面:
所有界面用符号名表示地址。特殊的界面名( 符号名)是预先用CHANNEL 声明的信号的变量通道符合逻辑的组合。
预先确定的信号变量通道, SER_1 和 SER_2 为了连续界面,和 $CMD(例如:“RUN....”)
为了解释程序命令。
访问通道的过程是一样的。为了可以在命令中能访问通道,通道名必须在“CHANNEL ”中被公告。
在文件 “$CUSTOM.DAT ”( 目录“....PROGRAM FILESKRCMADASTEU”) “:SER_1”和“:SER_2 ”中,变量是预先确定的。
.通道可以通过“COPEN”语句打开。 “CREAD”语句能用于读通道, “CWRITE” 语句用于写通道。
用“CCLOSE”语句关闭通道。
通道语句的规定和命令的信息是相同的。
状态信息是预先确定的结构类型“STATE_T”的变量的反馈。
如果要寻址外部模块,这是必要的,因为预定义的结构变量无法直接寻址。例如,外部模块LD_EXT_OBJ1不能通过$EXT_MOD_1直接寻址。
CHANNEL :Channel name :Interface name Structure variable
“STATE_T”有下列的定义:
STRUC STATE_T CMD_STAT R ET1, INT HITS, INT LENGTH
“CMD_STAT”是被下面预先确定的举例类型的数据:
ENUMCMD_STATCMD_OK,CMD_TIMEOUT ,DATA_OK ,DATA_BLK,DATA_END, CMD_ABORT,CMD_REJ ,CMD_PART,CMD_SYN ,FMT_ERR
这个命令可使用“CREAD”和“CWRITE”语句产生的可能用到预先确定的列举类型: ENUMMODUS_TSYNC ,ASYNC,ABS ,COND ,SEQ
在单独的命令中解释规定和命令的意义。只有参数被使用时才被列出。
例子
外部模块1的CHANNEL语句:
CHANNEL :LD_EXT_OBJ1 :LD_EXT_OBJ1 $EXT_MOD_1
使用“CHANNEL”语句分配实际通道的通道名:
Channel name: SER_2
被分配到
physical channel: SER_2
在“$CUSTOM.DAT ”文件中预先确定的
( 地址....PROGRAMFILESKRCMADASTEU)
CHANNELSER_2 $PSER_2
不需要对CHANNEL语句进行编程。它已经为文件$CUSTOM.DAT中的所有外部模块预定义。不过,为了便于理解,这里对该语句进行了解释。
机器人控制器包含两类界面:
- 简单程序界面-- signals
- 逻辑界面-- channels .
预先确定的信号变量通道, SER_1 和 SER_2 为了连续界面,和 $CMD(例如:“RUN....”)
为了解释程序命令。
访问通道的过程是一样的。为了可以在命令中能访问通道,通道名必须在“CHANNEL ”中被公告。
在文件 “$CUSTOM.DAT ”( 目录“....PROGRAM FILESKRCMADASTEU”) “:SER_1”和“:SER_2 ”中,变量是预先确定的。
.通道可以通过“COPEN”语句打开。 “CREAD”语句能用于读通道, “CWRITE” 语句用于写通道。
用“CCLOSE”语句关闭通道。
通道语句的规定和命令的信息是相同的。
状态信息是预先确定的结构类型“STATE_T”的变量的反馈。
如果要寻址外部模块,这是必要的,因为预定义的结构变量无法直接寻址。例如,外部模块LD_EXT_OBJ1不能通过$EXT_MOD_1直接寻址。
CHANNEL :Channel name :Interface name Structure variable
| Channel name | 任何符号名。 |
| Interface name | 预先确定的信号变量 SER_1 连续界面1 SER_2 连续界面2 |
| Structure variable | 系统决定结构变量。 赋值不能输出。. |
“STATE_T”有下列的定义:
STRUC STATE_T CMD_STAT R ET1, INT HITS, INT LENGTH
“CMD_STAT”是被下面预先确定的举例类型的数据:
ENUMCMD_STATCMD_OK,CMD_TIMEOUT ,DATA_OK ,DATA_BLK,DATA_END, CMD_ABORT,CMD_REJ ,CMD_PART,CMD_SYN ,FMT_ERR
这个命令可使用“CREAD”和“CWRITE”语句产生的可能用到预先确定的列举类型: ENUMMODUS_TSYNC ,ASYNC,ABS ,COND ,SEQ
在单独的命令中解释规定和命令的意义。只有参数被使用时才被列出。
例子
外部模块1的CHANNEL语句:
CHANNEL :LD_EXT_OBJ1 :LD_EXT_OBJ1 $EXT_MOD_1
使用“CHANNEL”语句分配实际通道的通道名:
Channel name: SER_2
被分配到
physical channel: SER_2
在“$CUSTOM.DAT ”文件中预先确定的
( 地址....PROGRAMFILESKRCMADASTEU)
CHANNELSER_2 $PSER_2
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
KUKA重型机器人2015-02-03 8315
-
"可编程机器人套件免费试用"活动参与者学习记录汇总贴2015-03-03 6644
-
KUKA机器人伺服驱动模块维修2021-09-17 1877
-
教你如何搭建浅层神经网络"Hello world"2020-12-10 1767
-
"STM32F0 Error: Flash Download failed - ""Cortex-M0""解决"2021-12-01 5648
-
芯片工艺的"7nm" 、"5nm"到底指什么?2023-07-28 13510
-
"科技春晚"2024 CES圆满落幕 开普勒人形机器人"首秀"广获好评2024-01-18 1637
-
科沃斯扫地机器人通过TÜV莱茵"防缠绕"和"高效边角清洁"认证2024-03-17 1914
-
KUKA机器人编程说明(英文)2025-03-07 522
-
电缆局部放电在线监测:守护电网安全的"黑科技"2025-04-14 1208
-
机器人手臂"听不懂"指令?EtherCAT转PROFINET网关妙解产线通信僵局2025-05-11 888
-
人形机器人为什么要定制? ——揭秘工业场景的"千面需求"2025-06-10 1701
-
机械臂越复杂越"卡顿"?别让控制器拖了后腿2026-02-02 927
-
从"替代人力"到"智能协同":履带式巡检机器人的产业跃迁2026-02-05 568
-
科义机器人:让工业巡检从"人海战术"转向"智能时代"2026-03-09 228
全部0条评论

快来发表一下你的评论吧 !
