

一文看懂伺服电机电子齿轮比设置方法
电子说
描述
伺服电机简介
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服电机的电子齿轮比怎么理解
简单的说,比如说电子齿轮比是1(系统默认),脉冲当量是1mm(就是物体在你发1个脉冲时运行的距离,注意是控制脉冲,就是你PLC发给伺服放大器的脉冲),当你把电子齿轮比改为2时,对应的脉冲当量就变成2mm.
也可这样理解 就是你给伺服放大器1个脉冲,当电子齿轮比是1的时候,伺服放大器就按照一个脉冲来运行,当电子齿轮比是2的时候,伺服放大器就按照2个脉冲来运行,以此类推!
伺服电机电子齿轮比设置方法
以电机最高转速为目的的设置
伺服电机旋转时,速度表现重于精度表现时候,希望将电机速度性能完全表现出来;而对于旋转分辨率要求较低的时。建议采用下列方法设置
1)条件以及要求,假设欲设置的伺服电机旋转速度为3000R/min,编码器每圈脉冲数为8192pulse/rev
2)计算说明
相对于3000R/min转速脉冲频率为8192&mes;3000/60=409 600HZ=409.6KHZ
当控制器脉冲输出最高只能为100kHZ 时,先将电子齿轮比的分子部分CMX和分母部分CDV均设置为1,再将由控制器JOG旋转送出10KHZ脉冲,作为最高转速1/10的脉冲频率,此时伺服电机速度为
(10/409.6)&mes;3000≈73R/min
如果未计算转速,可以直接监视驱动器转速值,也应为73R/min.
3)设置方法
10KHZ脉冲希望转速应为3000/min,但是实际为73r/min.为修正实际转速到300r/min.必须修改电子齿轮比。
73&mes;CMZ/CDV=300(R/MIN)
因此,CMX 分子可设置为300,CDV 分母可以设置为73.
控制器的脉冲输出频率为100KHZs 时的转速为
3000&mes;[﹙300/73﹚×100000] /409600=3009R/MIN
本实例中忽略了所有的结构条件,而实际应用中必须考虑传动部分的分辨率,如果忽略分变率最终导致产品无法使用。
伺服电机的电子齿轮比如何确定
1、电子齿轮比参数介绍

所谓“ 电子齿轮” 功能,主要有两方面的应用:一是调整电机旋转1圈所需要的指令脉冲数,以保证电机转速能够达到需求转速。例如上位机PLC最大发送脉冲频率为200KHz,若不修改电子齿轮比, 则电机旋转1圈需要10000个脉冲,那么电机最高转速为1200rpm,若将电子齿轮比设为2:1,或者将每转脉冲数设定为5000,则此时电机可以达到2400rpm转速。
例如:电子齿轮比设为1:1或者每转脉冲数设为10000,上位机PLC最高发送脉冲频率为200KHz
2、每转脉冲数和电子齿轮比的计算
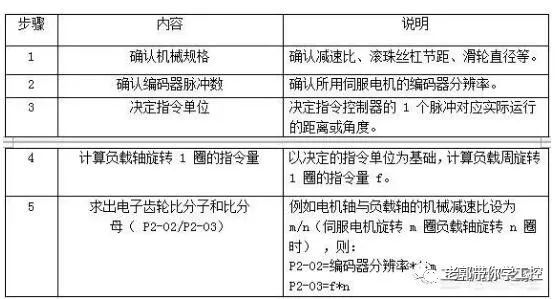
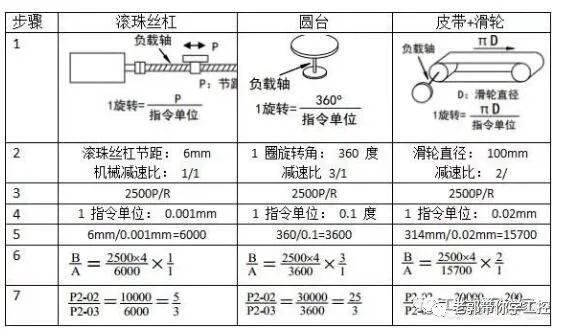
按照以下1~6的顺序,计算每转脉冲数或者电子齿轮比
注意:
(1)每转脉冲数和电子齿轮比都可以限定伺服电机旋转1圈所需的指令量,两者是互补关系,但是每转脉冲数的优先级要高于电子齿轮比,只有每转脉冲数设定为0的情况下电子齿轮比才会生效,这是用户需要注意的。特殊情况若算得每转脉冲数为小数时就要考虑使用电子齿轮比。
(2)P2-02和P2-03超过设定范围时,请将分子分母约分成可设定范围内的整数在进行设定。在不改变比值情况下的约分不影响使用。
(3)不加特殊说明现出场的电机编码器分辨率均为2500P/R。
(4)指令单位并不代表加工精度。在机械精度的基础上细化指令单位量,可以提高伺服的定位精度。比如在应用丝杠时,机械的精度可以达到0.01mm,那么0.01mm的指令单位当量就比0.1mm的指令单位当量更精确。
3、电子齿轮的设定实例
举例:
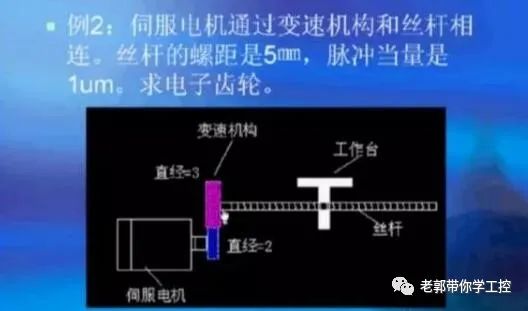
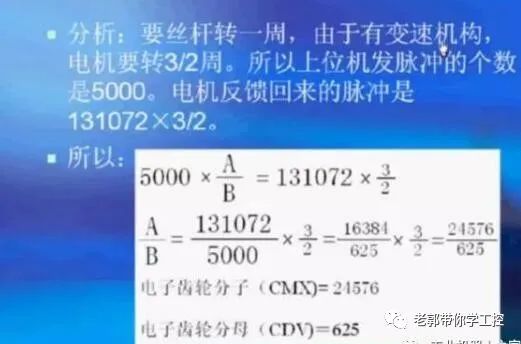
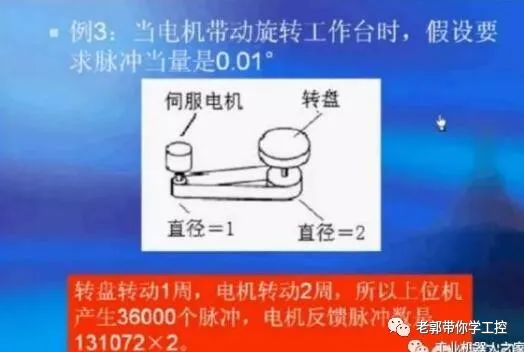
上面例子的补充说明:上位机脉冲个数5000,是通过,丝杠螺距为5mm,脉冲当量要求是0.001mm,所以脉冲个数是5/0.001=5000。编码器反馈脉冲是131072一转(伺服电机),但由于变速机构,故3/2。
审核编辑:刘清
-
关于电子齿轮比的应用总结2026-05-27 261
-
施耐德电气伺服驱动常用参数设置2026-04-22 477
-
电子齿轮比越大速度越快吗2026-03-16 565
-
松下伺服电机电子齿轮比怎么设置2024-09-07 4683
-
伺服电机旋转方向参数设置方法2024-06-12 7290
-
伺服电机的参数如何设置?2023-08-08 6502
-
伺服电机电子齿轮比是什么?#硬声创作季或许 2023-06-05
-
请问一下伺服驱动器电子齿轮比怎么理解呢?2023-03-02 1064
-
伺服电机电子齿轮比怎么设置?2021-09-28 5113
-
一文知道伺服驱动器电子齿轮比的设置方法2021-03-14 34530
-
以电机的最高转速为目的电子齿轮比设置2019-04-12 10036
-
伺服电机电子齿轮参数计算公式表资料免费下载2018-12-04 1761
-
一文看懂伺服电机电子齿轮比设置方法2018-04-02 107054
-
伺服电机电子齿轮比计算方法2018-02-05 134820
全部0条评论

快来发表一下你的评论吧 !
