

相比雷达技术,车载摄像头有哪些优势呢?
汽车电子
描述
智能网联汽车的智能化发展,离不开车载摄像头的进步,目前视觉感知摄像头、人脸识别摄像头已成为智能网联汽车的最重要硬件配置之一。可以预见的是,随着车载摄像头的进一步发展,随着对应算法和软件技术的进步,智能网联汽车将会更加强大。相比雷达技术,车载摄像头有哪些优势呢?
与雷达技术对比有哪些优势
1)相比于毫米波雷达,目前摄像头的主要优势在于:
目标识别与分类 - 目前普通的3D毫米波雷达仅可以检测到前方是否有障碍物,而无法精准识别障碍物的大小和类别;例如:各类车道线识别、红绿灯识别以及交通标志识别等;
可通行空间检测(FreeSpace) - 对车辆行驶的安全边界(可行驶区域)进行划分,主要对车辆、普通路边沿、侧石边沿、没有障碍物可见的边界、未知边界进行划分;
对横向移动目标的探测能力 ,比如对十字路口横穿的行人以及车辆的探测和追踪;
定位与地图创建 - 即视觉SLAM技术,虽然目前也有用毫米波雷达做SLAM的,不过视觉SLAM技术更加成熟,也更有应用前景;
2)在自动驾驶系统中,激光雷达与摄像头感知作用比较类似,但相比激光雷达,其优势为:
红绿灯识别及交通标示识别
成本优势,且算法及技术成熟度比较高
物体识别率高车载摄像头分布情况
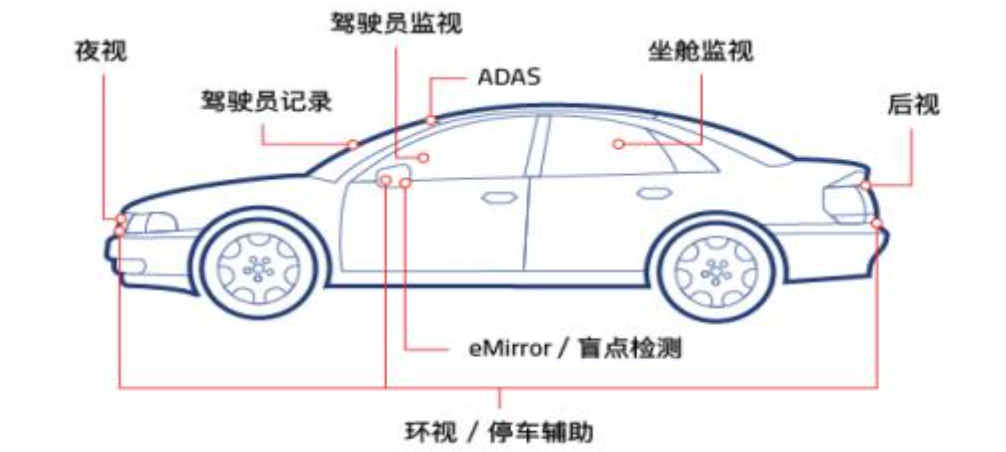
目前车上搭载的车载摄像头根据安装位置主要分为车载摄像头主要分为前视摄像头、环视摄像头、后视摄像头、侧视摄像头以及内置摄像头五种类别。
前视摄像头:主要安装在前挡风玻璃上,用于实现行车的视觉感知及识别功能,根据功能又可以分为前视主摄像头、前视窄角摄像头和前视广角摄像头。
前视主摄像头:该摄像头在 L2 的ADAS 系统中作为主摄像头使用。其视场角的一般为 30°、50°、60°、100°、120°,检测距离一般为 150 - 170 m,摄像头输出的格式为 RCCB 或 RCCC。
前视广角摄像头:该摄像头的作用主要是识别距离较近的物体,主要用于城市道路工况、低速行驶等场景,其视场角在 120° - 150°,检测距离在 50 m 左右。在后续 8MP 镜头大规模装车后,无需该摄像头。
前视窄角摄像头:该摄像头的主要作用是进行红绿灯、行人等目标的识别,一般选用窄角镜头,可选择 30 - 40° 左右的镜头。并且该镜头的像素一般和前视主摄像头的镜头像素一致,该摄像头采用窄角度,具有更高的像素密度和更远的检测距离,一般可达 250 m 甚至可探测更远的距离。
在上了 8MP 摄像头后,前视主摄像头的 FOV 可达 120°,该摄像头可能就不需要了。检测距离在 60 m 左右。
环视摄像头:主要安装在车身四周,一般使用 4 - 8 个摄像头,可分为前向鱼眼摄像头/左侧鱼眼摄像头/右侧鱼眼摄像头/后向鱼眼摄像头。用于全景环视功能的显示,以及融合泊车功能的视觉感知及目标检测;常用色彩矩阵为 RGGB,因为有色彩还原的需求。
后视摄像头:一般安装在后备箱上,主要是实现泊车辅助。视场角在 120 - 140° 之间,探测距离大概 50 m。
侧前视摄像头:安装在 B 柱或者车辆后视镜处,该摄像头的视场角一般为 90° - 100°,探测距离大概在 80 m 左右,这个摄像头的主要作用是检测侧向车辆及自行车。
侧后视摄像头:一般安装在车辆前翼子板处,该摄像头的视场角一般为 90° 左右,探测距离也在 80 m 左右,主要用于车辆变道、汇入其它道路等场景应用。内置摄像头:主要用于监测司机状态,实现疲劳提醒等功能。
编辑:黄飞
-
车载摄像头的EMC问题案例2024-12-18 2897
-
车载摄像头技术趋势分析 车载摄像头的关键技术2023-07-24 1996
-
车载摄像头防水设计要点2023-07-21 3975
-
什么是车载摄像头?车载摄像头与雷达技术对比有哪些优势2023-07-04 5769
-
车载摄像头的结构分析2023-06-14 8308
-
车载摄像头技术趋势分析2023-05-16 1736
-
车载摄像头防水检测重要吗?-海瑞思2023-05-15 1993
-
车载摄像头安全为本 技术不断升级2022-04-21 3667
-
车载摄像头如何进行气密性防水检测2021-07-03 2060
-
车载摄像头怎么连接手机_车载摄像头怎么接线2020-12-02 37273
-
关于车载摄像头防水密封的摄像模组UV胶应用方案2020-08-10 4775
-
瓜分车载摄像头/雷达巨大蛋糕2018-03-23 2164
-
车载摄像头常见知识与故障处理2017-03-16 15962
-
汽车雷达与摄像头,谷歌那样玩,咱们这么玩2014-03-13 11921
全部0条评论

快来发表一下你的评论吧 !
