

机器人坐标系选择指令和操作步骤
机器人
554人已加入
描述
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势;用户坐标系用于确定每个作业空间,另外在位置寄存器和位置补偿指令的使用上也涉及用户坐标系。
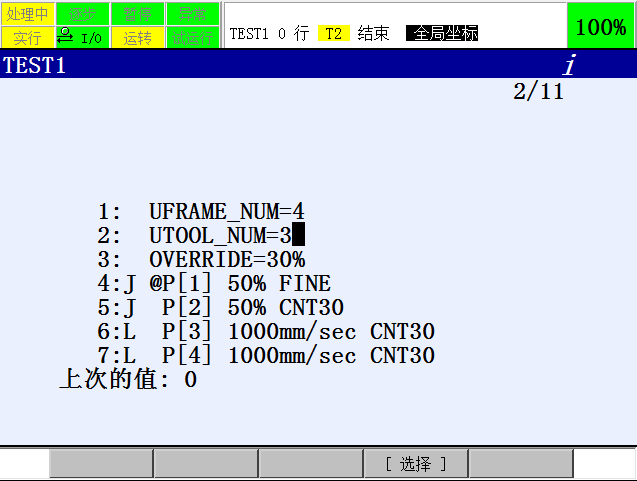
由于现场的误操作导致坐标系号码未被正确激活时,会导致程序出错,如下所示:

因此,在程序中需要添加坐标系选择指令来激活正确的坐标系号码。根据激活对象的不同,可以使用用户坐标系选择指令和工具坐标系选择指令。
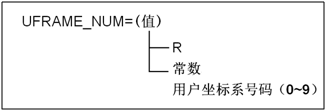
A. 用户坐标系选择指令
作用:改变当前所选的用户坐标系号码
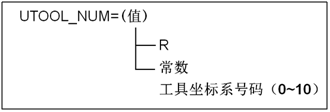
B. 工具坐标系选择指令
作用:改变当前所选的工具坐标系号码
C. 操作步骤
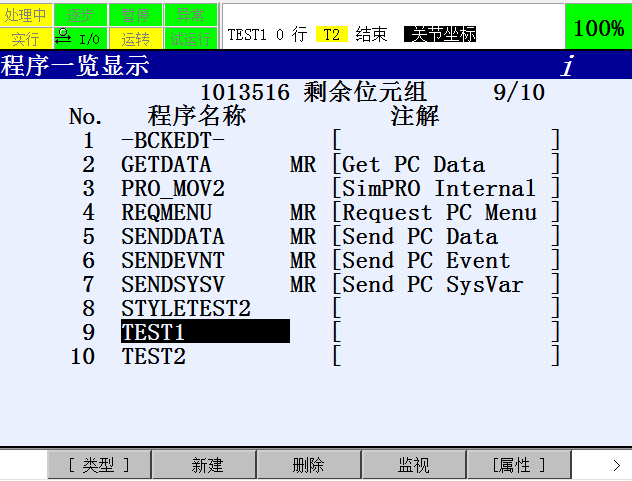
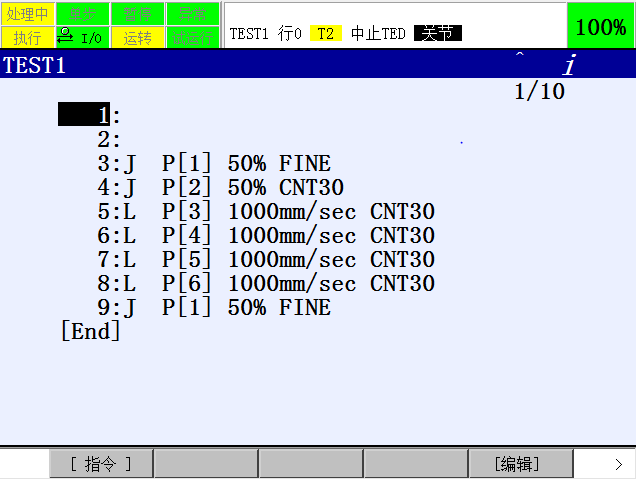
1、按下 [ SELECT ](程序一览)键显示目录画面
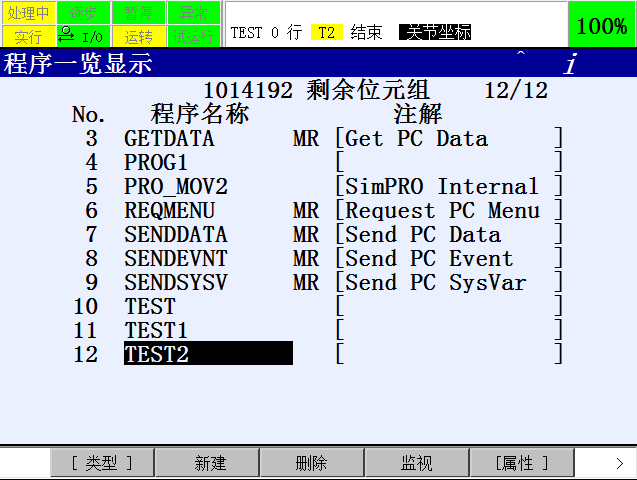
2.选择需要编辑的程序
3.移动光标至需要添加的位置处
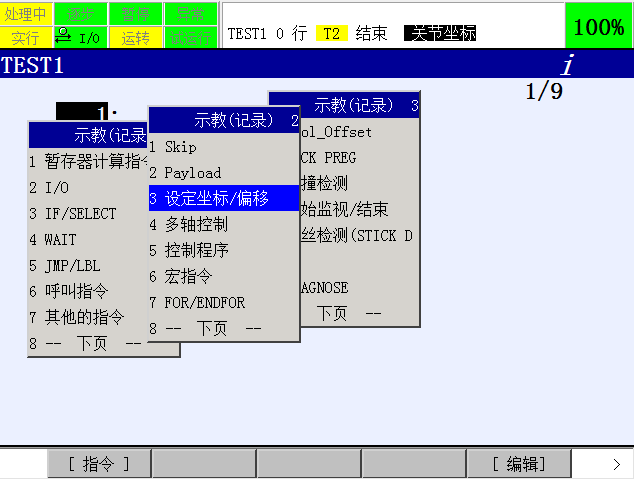
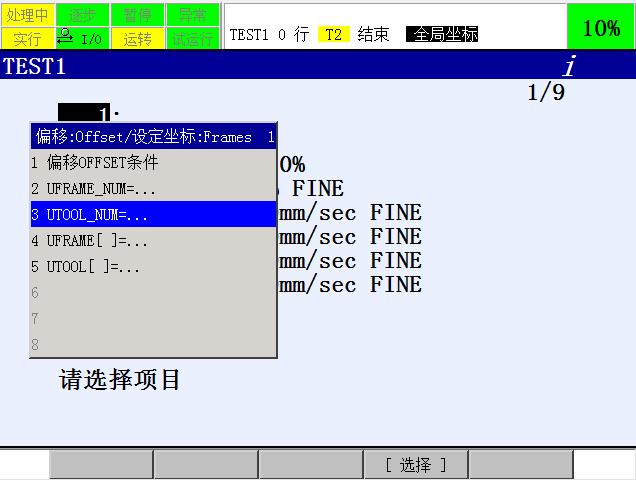
4.选择F1 [ 指令 ],选择 [ 设定坐标/偏移 ]
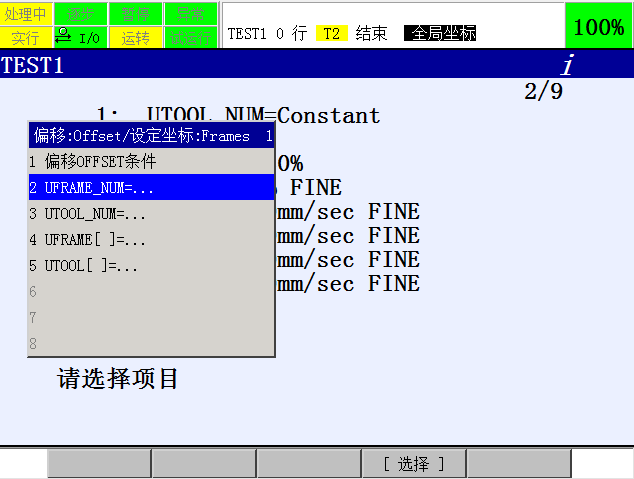
5.选择用户坐标系选择指令[ UFRAME_NUM=...]
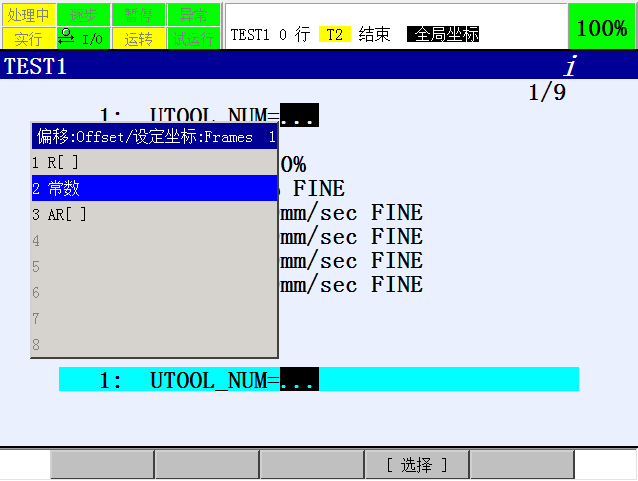
6.选择[ 常数 ]
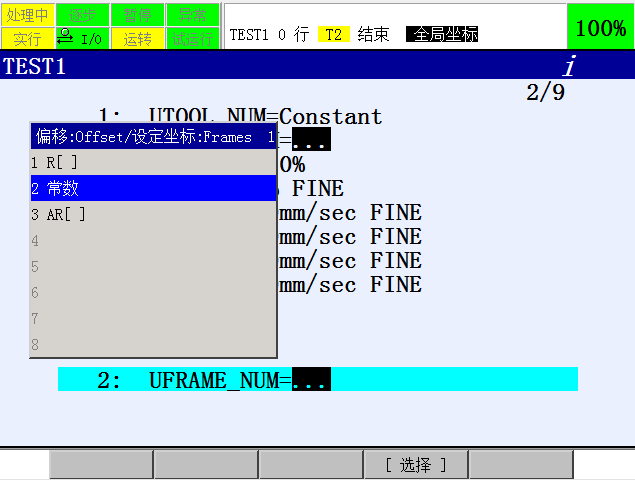
7.选择工具坐标系选择指令[ UTOOL_NUM=... ]
8.选择[ 常数 ]
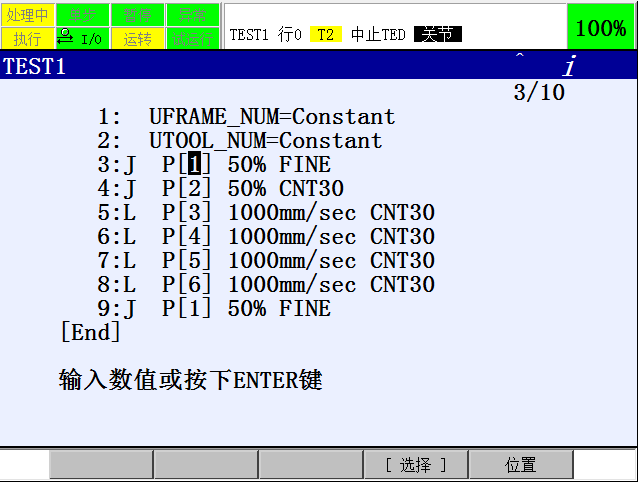
9.移动光标至运动点位,选择F5[位置 ]
10.确认当前程序中使用的工具坐标系号和用户坐标系号
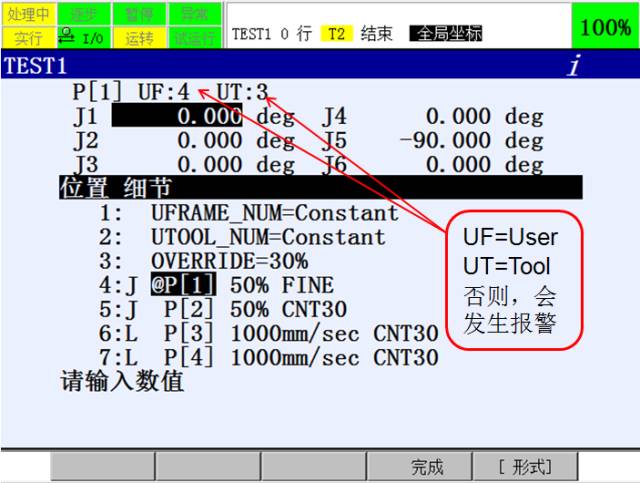
11.输入步骤10中查看的用户坐标系号和工具坐标系号
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业机器人常用坐标系介绍2017-02-19 35011
-
abb机器人工具坐标系问题2024-08-07 14513
-
机器人的坐标系的建立2013-06-10 3036
-
KUKA机器人问题解答2019-07-15 2627
-
介绍坐标系和机器人之间的纽带即连杆坐标系2021-09-01 1556
-
机器人基坐标系标定方法研究2018-03-07 1075
-
关于工业机器人的四类坐标系概述2018-10-05 28940
-
机器人4大坐标系讲解2019-05-14 24881
-
带你来剖析机器人的坐标系吧!2020-05-09 6208
-
KUKA C4机器人的轨迹BASE与TOOL坐标2020-12-23 7041
-
机器人坐标系用法和算法原理2023-05-11 2948
-
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系2023-07-03 16055
-
焊接机器人坐标系有哪几种2023-10-18 1987
-
深度剖析机器人的四大坐标系2023-11-13 3320
-
机器人中都有哪些坐标系2023-11-22 3287
全部0条评论

快来发表一下你的评论吧 !
