

MIT最新研究让机械手只需轻轻一抓就能识别物体!
描述
如果和机械手一起玩“摸箱子”游戏,你有信心能赢么?
先别盲目自信,论谁更会“摸”,机械手说不定更胜一筹,因为它的「类人触感技术」最近又又又进化了!
别看它只有3根手指头,仅需要抓握一次,这只机械手就能识别出手中的物体是什么,准确率可达85%!
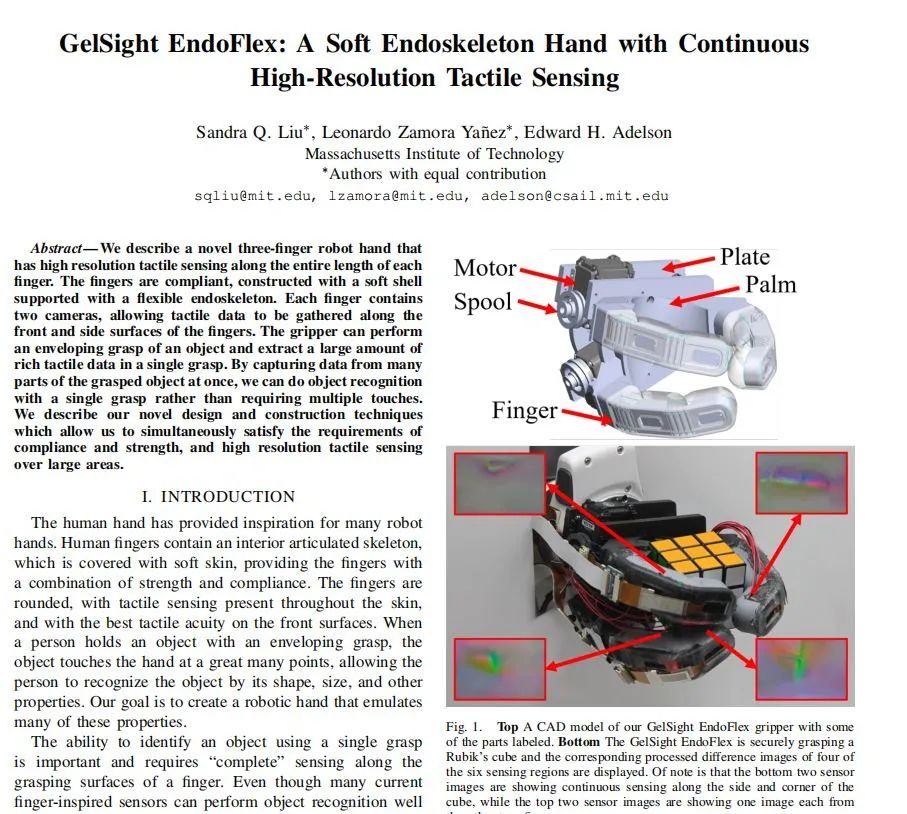
这是MIT最新研究成果,他们在其透明“皮肤”下集成了多个高分辨率传感器,使用摄像头和LED来收集物体形状的视觉信息,沿着手指提供连续感应,一次抓取后就能识别物体,小手一握,尽在掌握!
▍全手指集成高分辨率传感器
具有触觉的机械手不在少数,它们要么把传感器安装在指尖中,需要和物体完全接触才能感知;要么将低分辨率传感器分布在整个手指上,通常需要多次抓握才能捕获信息。
这让机械手的触觉感知显得有些“迟钝”。
相比之下,MIT的机械手具有极高的敏感度,那它到底是怎么做到的?
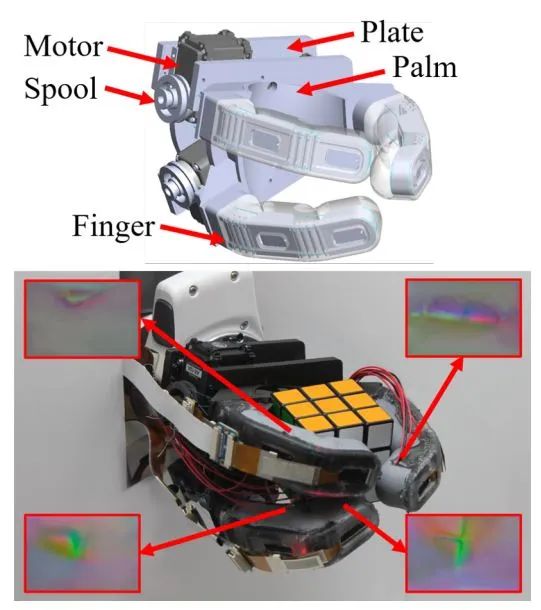
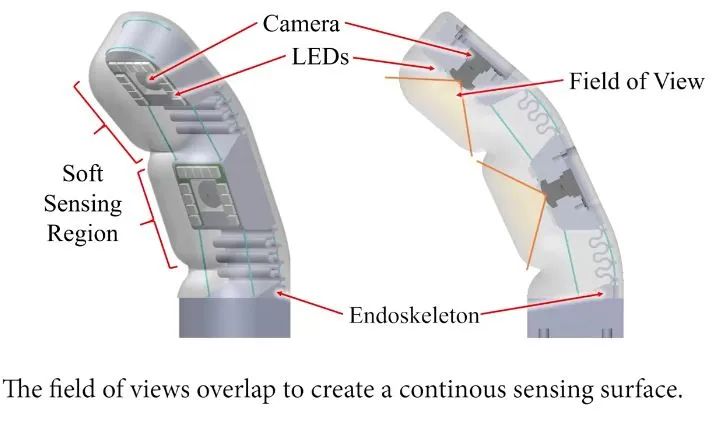
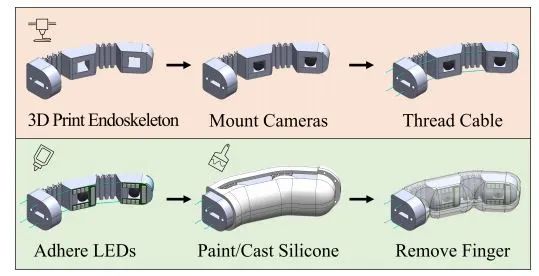
我们先从机械手的设计讲起,它结合了刚性和柔性设计,既“强壮”又“温柔”,指骨由3D打印的刚性内骨骼组成,包裹在透明的硅胶“皮肤”里,这种设计让它可以轻松拿起重物,柔软的皮肤也给交互带来更多安全感。
其中,每个手指的刚性内骨骼都由可弯曲的关节和指骨组成:
(每个手指独立操作,具有一个自由度,如果损坏可以快速更换)
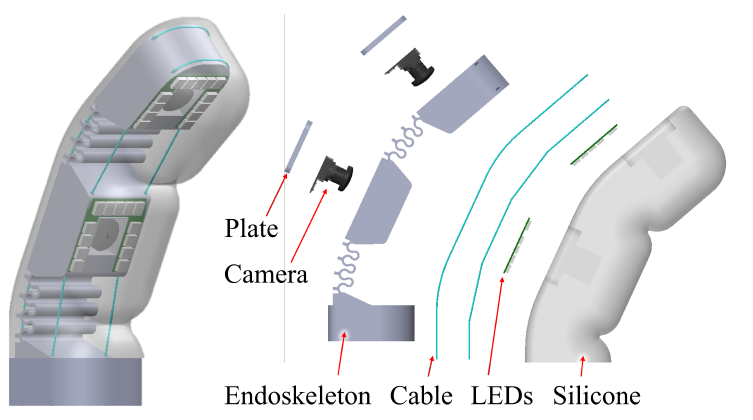
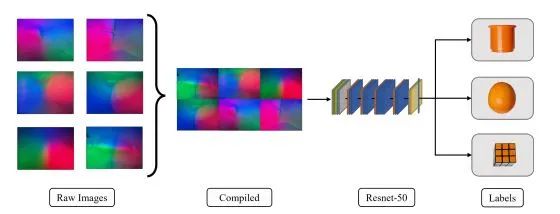
每段指骨内嵌入了一对精细的触摸传感器,称为GelSight 传感器,由一个摄像头和三个彩色 LED 组成。这里的摄像头并不是让机械手去“看”物体,而是利用彩色 LED 从内部照亮皮肤,相机来捕捉物体的大致轮廓图像。

当图像的照明轮廓出现在皮肤上时,一种算法执行反向计算将轮廓映射到所抓物体的表面上。研究人员训练了一个机器学习模型,以使用原始相机图像数据识别物体。
更妙的是,虽然研发团队只在每段指骨中嵌入了摄像机,但手指可以弯曲呀,当它弯曲的时候相机的范围能够略微重叠,这样就实现了整个手指长度的连续感应!
而机械手虽然只有3根手指,但每一根的作用都不多不少刚刚好:其中两根手指以 Y 型排列,第三根手指作为辅助的拇指,当它抓住物体时,手会捕捉六张图像(每个手指两张),并将这些图像发送到机器学习算法来识别物体。结合每根手指的连续触觉感应,它可以从一次抓握中收集丰富的触觉数据!
▍意外收获——皱纹让硅胶皮肤寿命更长
机械手的设计过程也并不是那么顺利的,在对机械手进行测试时,研发团队发现:机械手的硅胶皮肤会随着时间的推移从表面剥落。
但同时,他们还有个意外收获——添加皱纹可以增加机械手寿命!
最初,为了解决硅胶剥落的问题,研发团队在内骨骼关节中增加了曲线设计,这样可以在手指弯曲时分担硅胶皮肤的压力;他们还在关节上增加了折痕,这样当手指弯曲时硅胶就不会被压扁。
这一切都是为了防止硅胶表面起皱,但随后他们发现:在手指表面制造的皱纹,有助于防止硅胶膜上的撕裂!
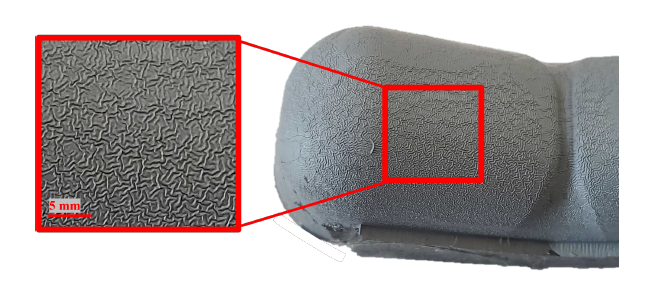
和光滑的硅胶皮肤相比,皱纹有助于减轻由尖角进入传感器表面而造成的高应力点。有皱纹的表面也比光滑的表面摩擦更小。虽然皱纹会出现在传感器图像中,导致表面重建困难,但它完全没有对物体分类结果产生影响。
“皱纹的用处是我们的一个偶然发现。当我们在表面合成它们时,我们发现它们实际上使手指比我们预期的更耐用,”MIT的研究人员表示。
GelSight EndoFlex 传感器网状皱纹表面的特写图像。其中一条皱纹的宽度约为 0.4 毫米,是我们在模具表面喷上油漆,然后再将硅胶浇注到内部时才形成的。
▍进一步研发感知手掌
这项研究的第一作者是MIT的机械工程博士生Sandra Liu,她目前在Edward Adelson 教授领导的感知科学小组中进行研究工作。该研究将在 RoboSoft 会议上展示。
这项研究为机械手的发展带来了新的可能性,一次抓握精准识别大大提升了速度和效率,“我们的目标是将人手的功能尽可能赋予给机器人,它可以完成其他机器人手指目前无法完成的任务,”Sandra Liu说:“未来我们考虑进一步研发具有感应功能的手掌,更好地进行触觉区分。”
未来,研究人员还希望改进硬件,以减少硅胶随时间的磨损量,并为拇指增加更多的驱动力,使其能够执行更广泛的任务。
审核编辑 :李倩
-
机械手 OEM 的应用2024-09-18 1050
-
啤酒生产线六自由度机械手抓瓶控制系统设计2013-11-14 8929
-
【GoKit申请】六轴智能机械手2015-11-02 6943
-
【NanoPi2申请】变约束连杆机械手控制系统研究2015-12-02 2356
-
使用桁架式机械手有哪些优势?2020-11-25 1747
-
与机械手通信,首先暂停机械手,后续继续运行机械手程序后,labview接收不到指令2021-06-21 7152
-
如何设计一款基于STM32的仿生机械手2022-01-07 2438
-
PLC控制机械手设计2008-12-13 3001
-
机械手图册——机械手设计必看2018-02-01 2624
-
新型抓胎机械手结构优化及动作分析2018-03-07 1298
-
数控机床机械手手抓要求2019-01-16 1709
-
MIT的低成本传感器手套有望使机械手通过触摸识别物体2019-06-04 3830
-
码垛机械手的工作原理是什么,它的性能特点有哪些2020-08-21 6198
-
西安交大毕业生让机械手学会写字2021-06-15 2746
-
机器视觉控制机械手的具体过程2024-07-04 2350
全部0条评论

快来发表一下你的评论吧 !
