

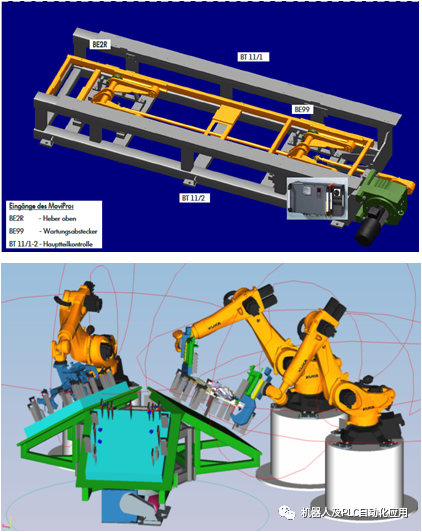
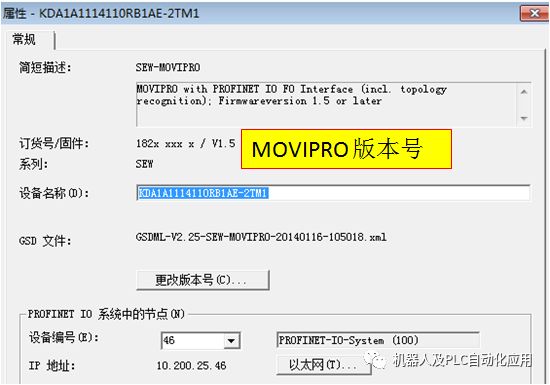
生降位的电机控制-SEW-MOVIPRO
描述
升降滚床和转台的控制多使用MOVIPRO,多采用AMA0801控制模块.

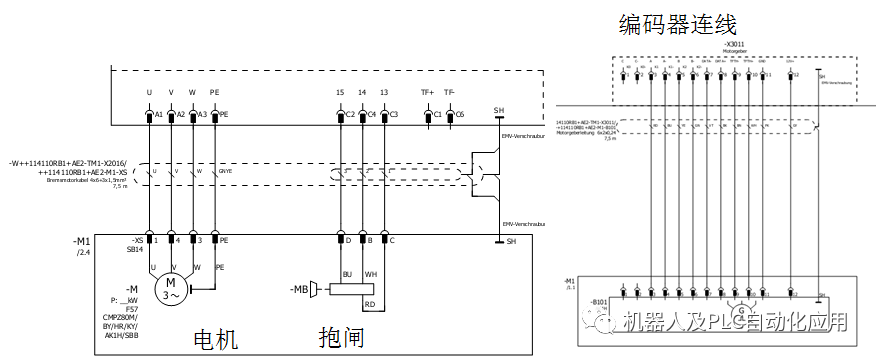
硬线图纸介绍:
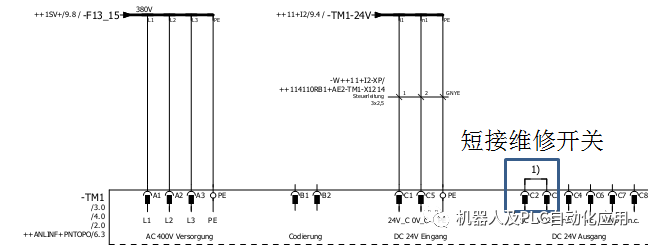
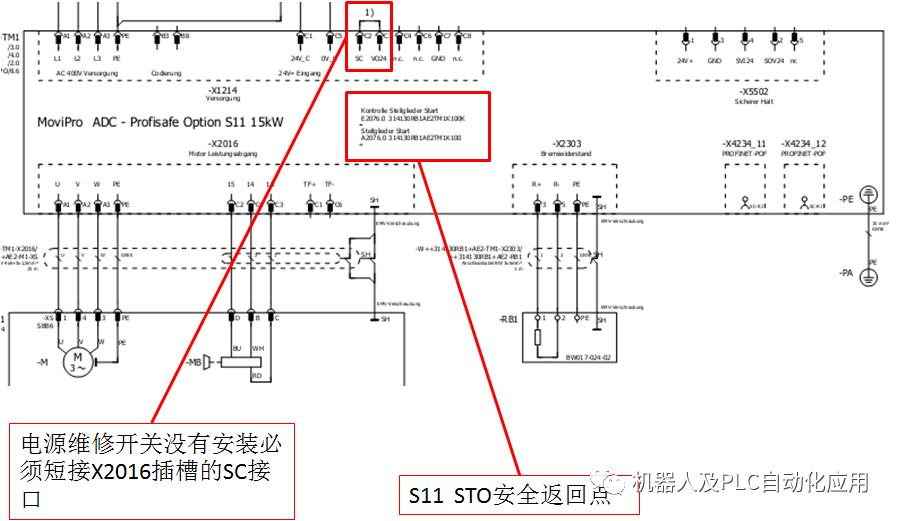
安全点的使用,E0.0STO安全使能,A0.0电源控制反馈
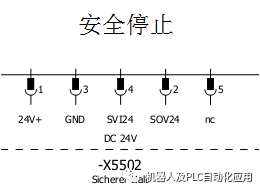
-----------
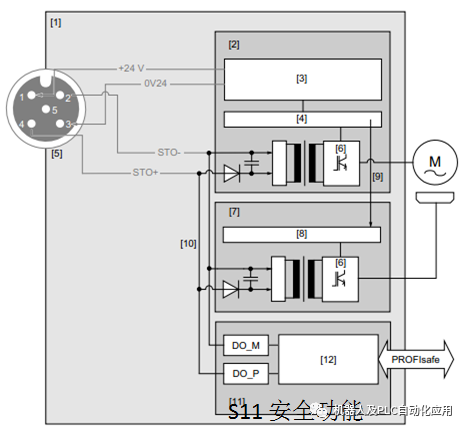
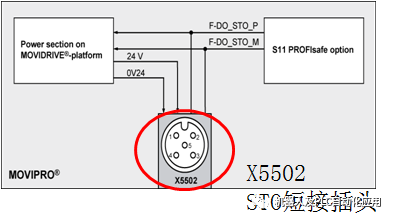
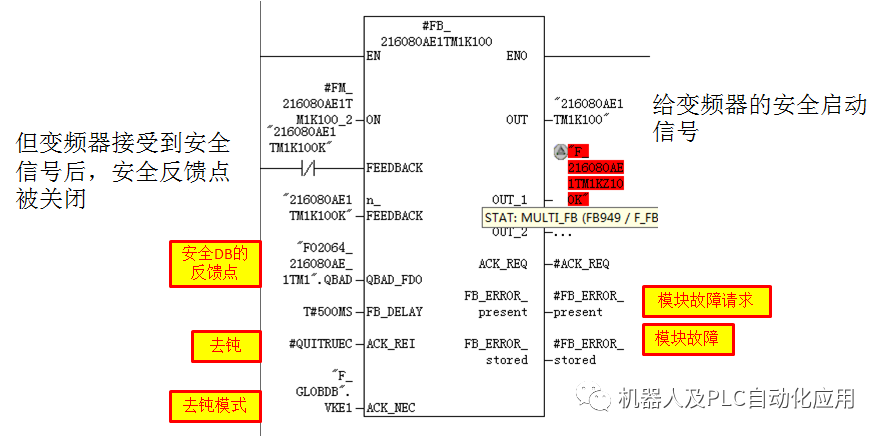
•X5520-STO安全点直接控制变频器的功率单元以及抱闸的控制单元,接通后使抱闸和电机可以控制。
•S11安全模块单元直接控制变频器的功率单元以及抱闸的控制单元,接通后使抱闸和电机可以控制。
•SEW变频器MOVIPRO的S11功能与X5520-STO安全点不能同时使用,也是直接控制电机是否得电,以及关闭电机抱闸的电。
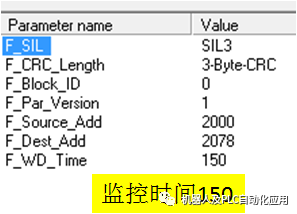
安全地址的设置:

安全地址长度2BYTE,后面2个字的长度没用。
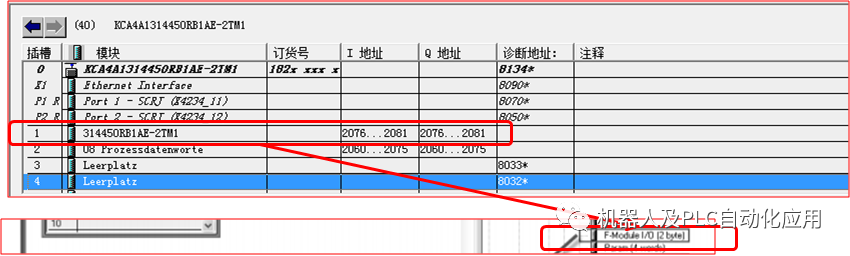

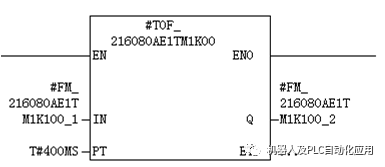
硬件组态部分:


延时关断启动变频器安全信号
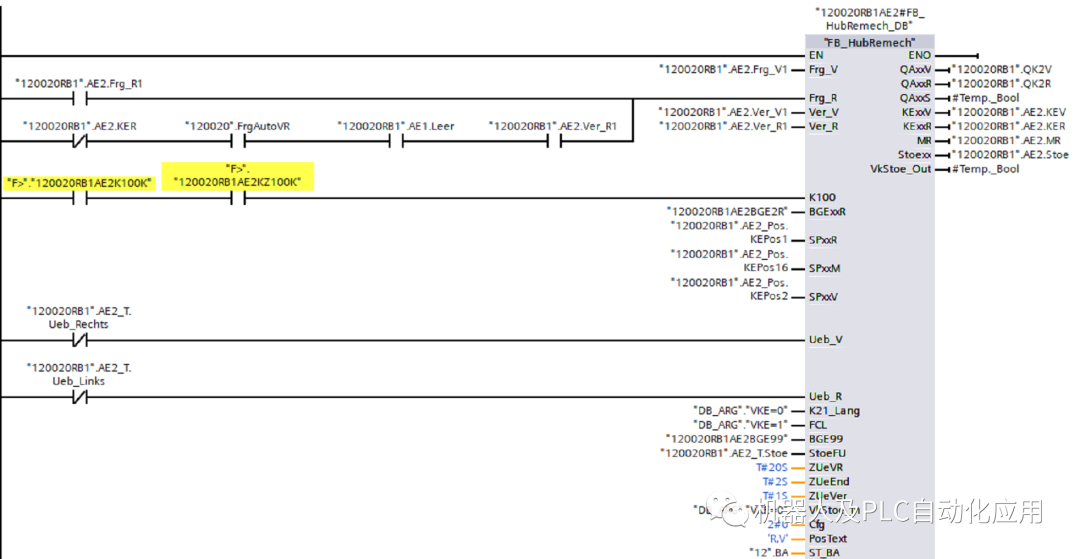
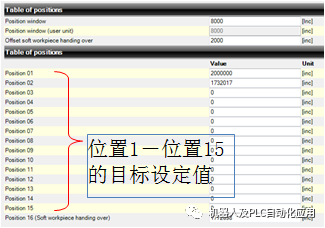
通过AMA0801的二进制设定)表格定位实现位置控制



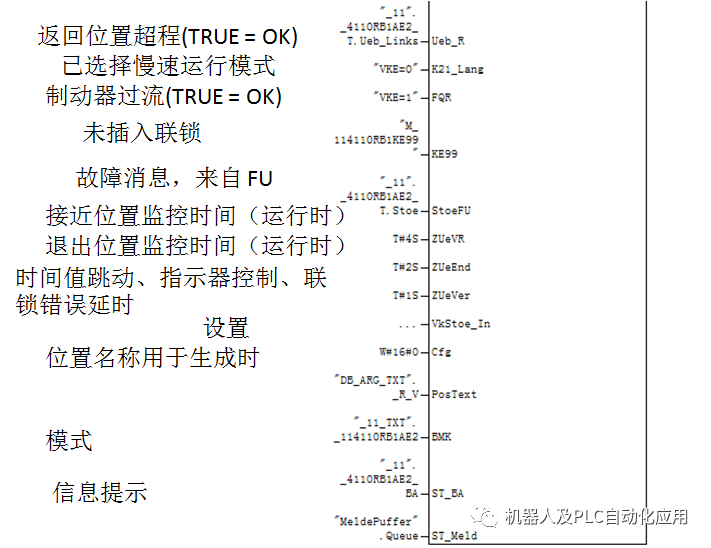
视以下错误类型:
启用故障:如果同时挂起多个启用(仅在“自动”模式下),则显示错误消息。
故障,结束位置指示灯控制:如果同时有多个结束位置挂起,则显示错误消息。时间延迟“ZUeVer”已到位。
结束位置退出而没有控制:如果结束位置退出时没有挂起启用信号,则会生成错误消息。时间延迟“ZUeVer”已到位。
结束位置未退出:如果结束位置在挂起控制的情况下未退出,则会生成错误消息。时间延迟“ZUeEnd”已到位。
时间监控,向前移动:如果在“ZUeVR”监控时间内未到达位置,则会生成错误消息。
时间监控,向后移动:如果在“ZUeVR”监控时间内未到达位置,则会生成错误消息。
联锁故障:如果在没有相应联锁条件挂起的情况下,块上的启用挂起,则会生成错误消息。时间延迟“TVer”已到位。
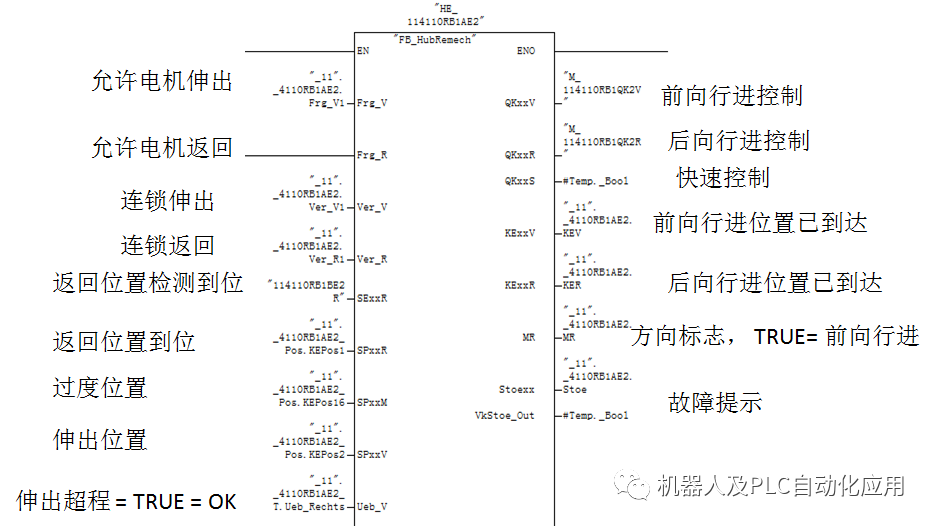
故障,到达前端位置:如果输入为FALSE,则会生成错误消息。然后,驱动器只能在激活E7桥接的情况下沿相反方向缩回。
故障,末端位置向后到达:如果输入为FALSE,则会生成错误消息。然后,驱动器只能在激活E7桥接的情况下沿相反方向缩回。
电机保护故障:如果输入为FALSE,则会生成错误消息。
电机温度故障:如果输入为FALSE,则会生成错误消息。
联锁故障:如果插入联锁,则会生成错误消息(输入为FALSE)。
表格定位模式是位置已经在AMA0801里编好,通过位置号直接调用
输出控制:
处于“自动”模式期间,如果没有未决故障且相应联锁条件已经满足,则触发这些输出。
处于“ 手动” 模式期间,如果没有未决故障且所需动作按钮和相应联锁条件处于活跃状态,则触发
这些输出。出现“末位位置已到达” 故障后,只能采用活跃的 E7 桥接功能让驱动装置反向回退至
已经激活的过行程位置。
如果已经满足“ 手动” 或“ 自动” 控制条件,驱动装置将一直运行,直至收到停止消息或者到达末位
位置。设置停止消息时,必须让驱动装置停止运动时可以激活 "In_Pos" 凸轮。
驱动装置若因故障或其它原因而停止运动,则该驱动装置当且仅当全部行进条件都恢复后再慢
速行进至目标位置。
WINCC 操作按钮的连锁信号
dwVisuWerte1.X24 := Ver_RAND (ST_BA.K25_FrHand OR ST_BA.K26_FrAuto);
返回连锁显示条件:返回连锁条件,手动工作模式,自动工作模式
dwVisuWerte1.X25 := Ver_VAND (ST_BA.K25_FrHand OR ST_BA.K26_FrAuto);
伸出连锁显示条件:伸出连锁条件,手动工作模式,自动工作模式
审核编辑 :李倩
-
走进SEW电机智能工厂!2023-11-25 6621
-
MOVIPRO:电机初始化Starting up the motor encoder2023-10-24 2561
-
SEW-MOVIPRO启动应用程序配置程序2023-10-22 2093
-
浅谈SEW伺服电机的基础知识2023-07-03 2495
-
SEW-movifit变频器的VR控制应用分析2023-05-08 2736
-
SEW-MOVIPRO启动应用程序配置程序设置步骤2023-04-03 4238
-
如何将SEW变频器数据保存到存储卡里呢?2023-02-08 3960
-
滚床控制SEW变频器MOVIfit的PLC控制/S11安全控制设置2023-01-17 5014
-
如何将SEW变频器数据保存到存储卡里呢2022-07-27 4108
-
风电机组控制降载技术.pdf2022-03-15 1010
-
徐州回收SEW编码器公司2021-06-08 1618
-
AD5227:64位升降控制数字电位器数据表2021-05-26 1267
-
生降位的电机控制-SEW-MOVIPRO2020-08-07 4130
-
SEW电机结构及技术参数2017-10-25 4240
全部0条评论

快来发表一下你的评论吧 !
