

基于粘连节点的移动机器人运动协调方法
机器人
553人已加入
描述
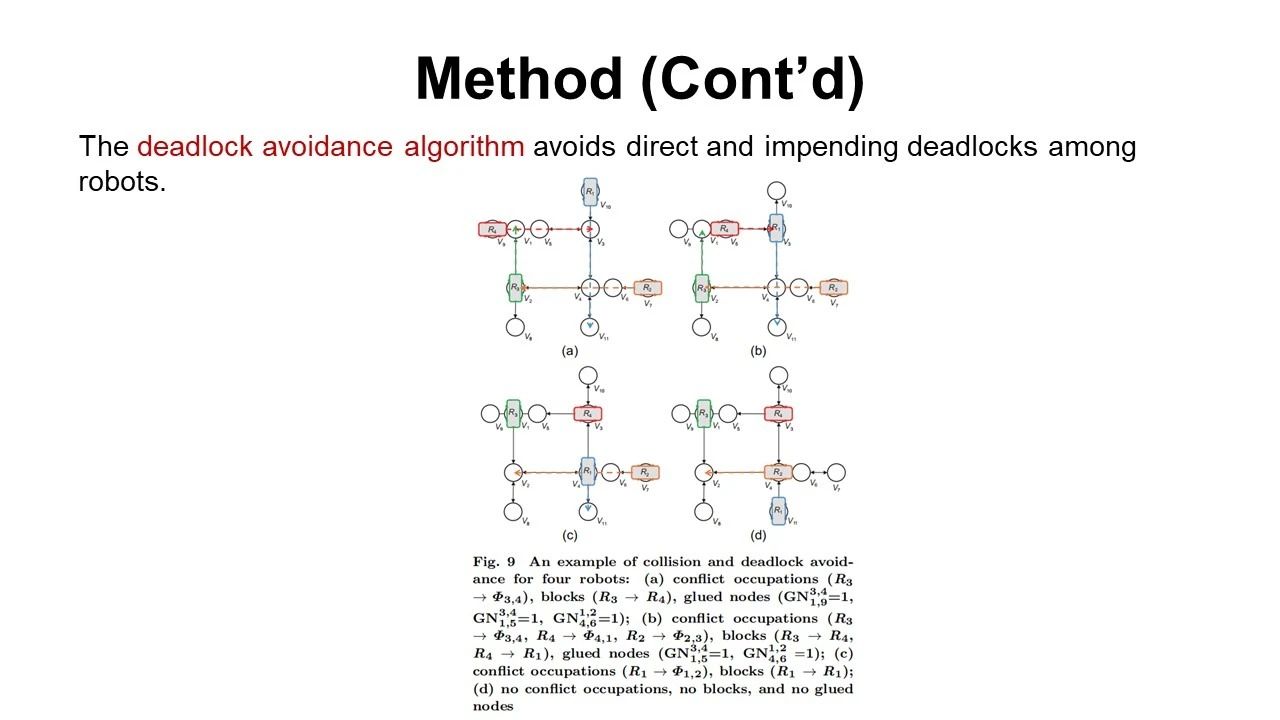
中文摘要:多移动机器人系统(MMRS)广泛用于制造业和仓储等工业场景的运输。在MMRS中,碰撞和死锁可能导致财产损失或系统停滞,因此运动协同十分重要。然而,在一些场景中,机器人尺寸在载货和未载货时是不同的,即机器人尺寸是变化的,这使得运动协同更具挑战性。
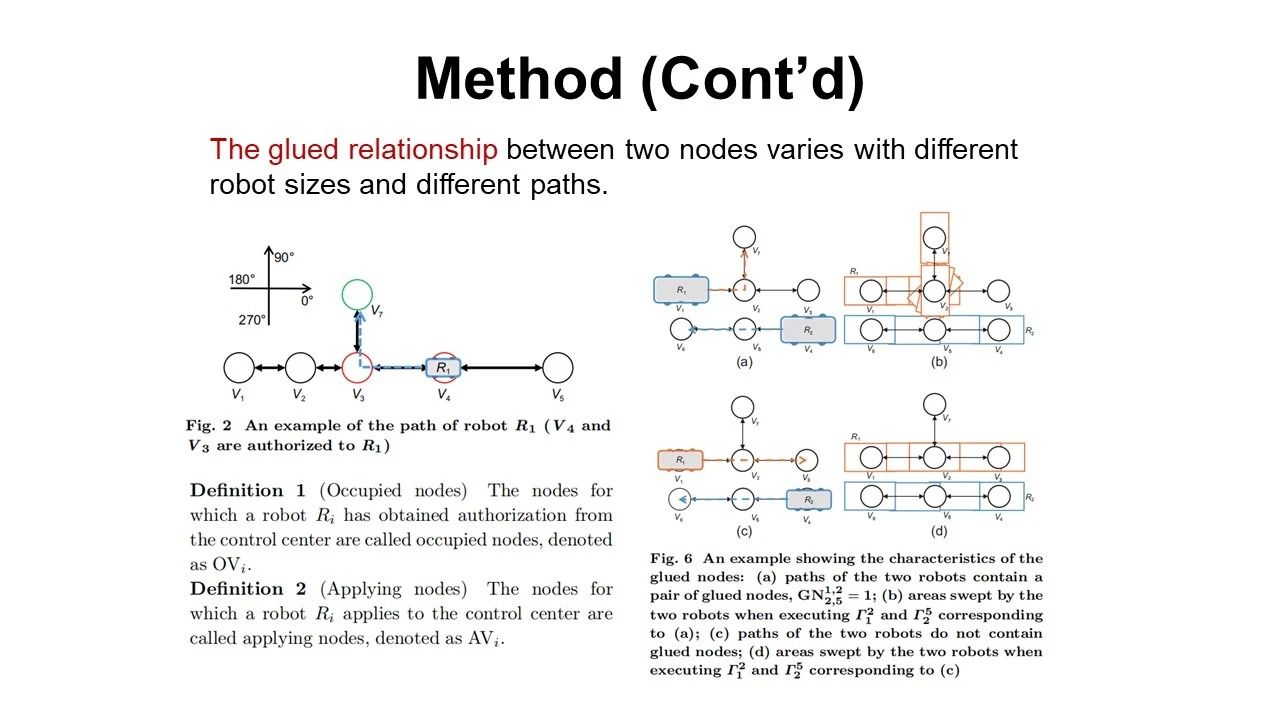
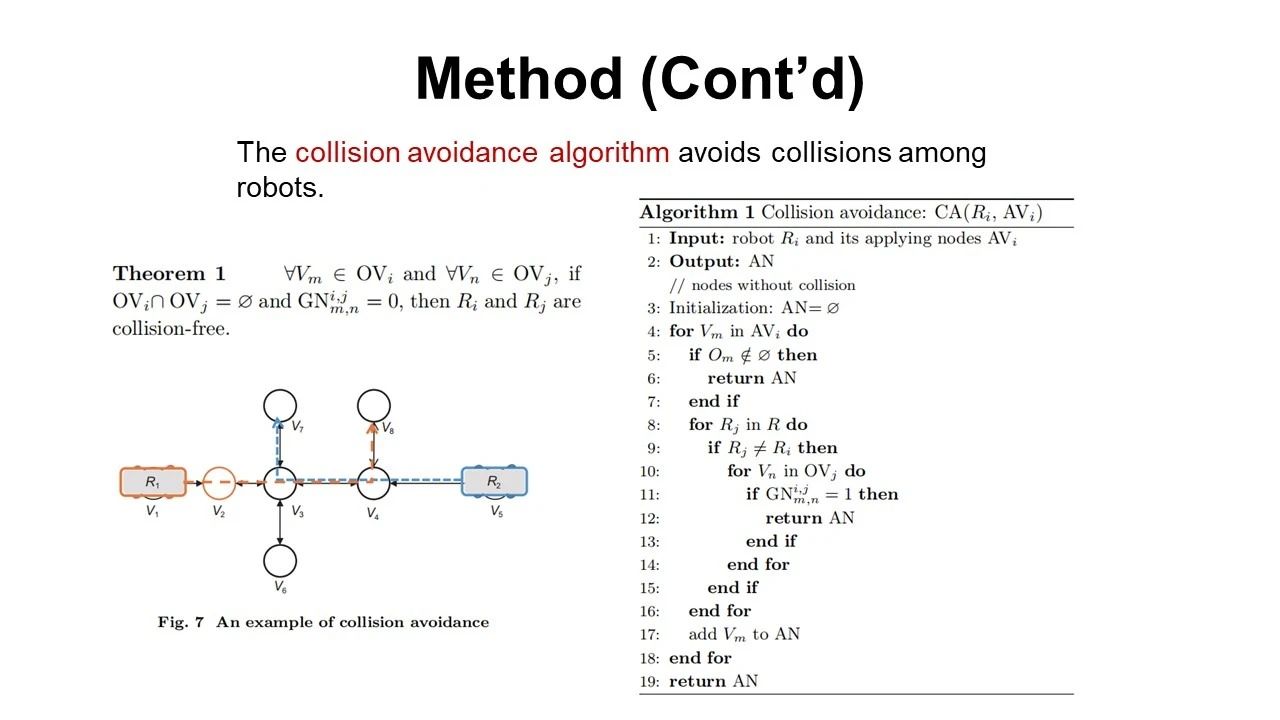
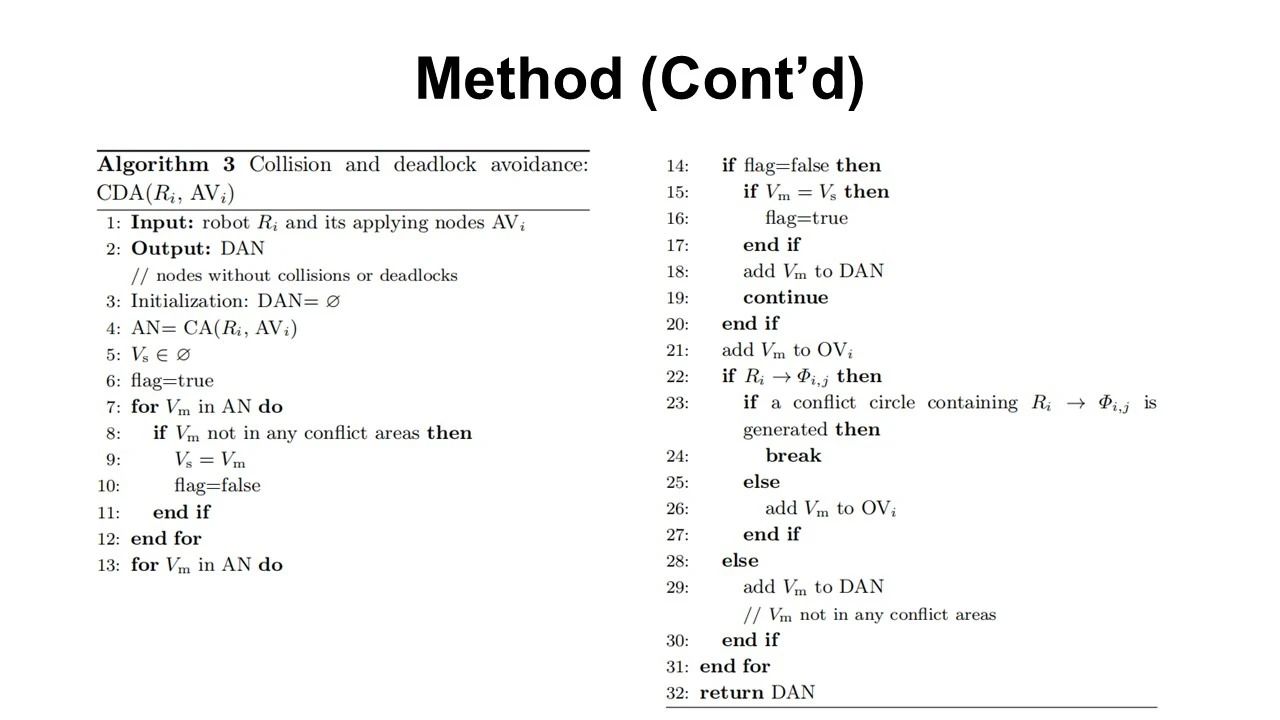
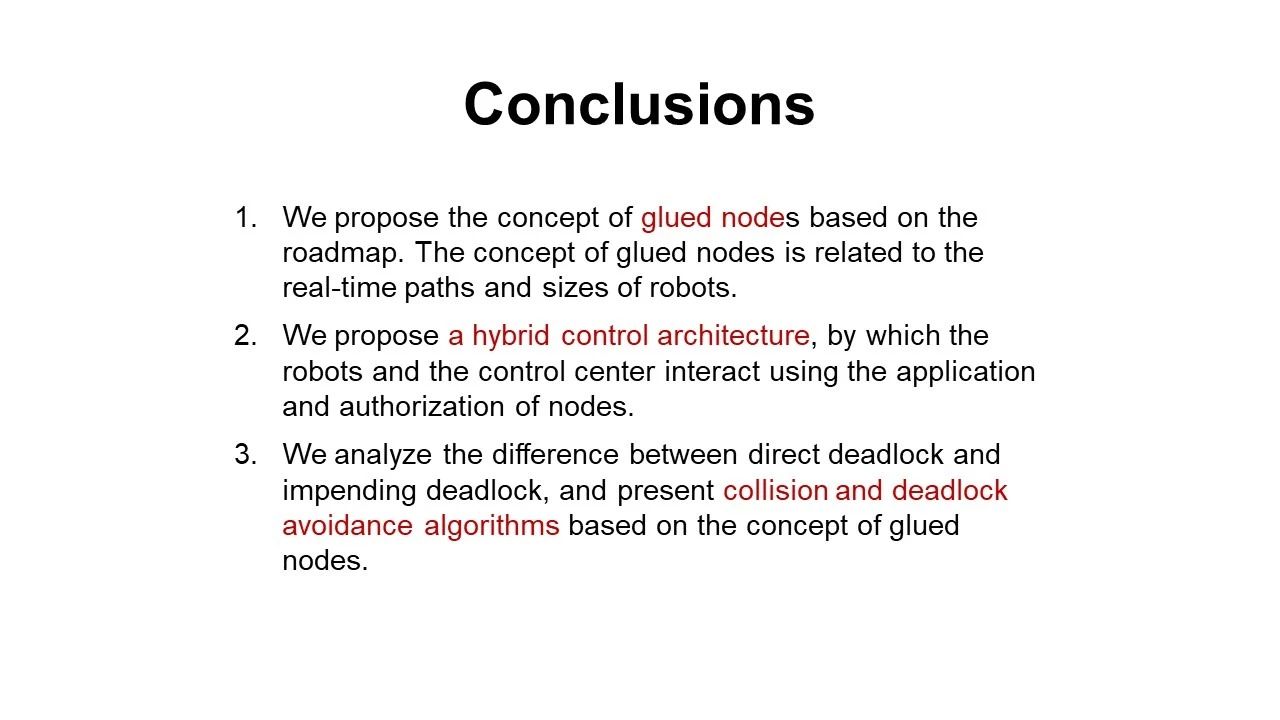
基于区域控制的方法首先需要将环境划分为不相交区域,然后通过区域的分配静态或动态地进行运动协同。但是,这种基于区域控制的方法对于变尺寸机器人不够精确,降低系统效率。因此,提出一种基于粘连节点的运动协调方法,可基于路线图和机器人实时路径动态避免碰撞和死锁。粘连节点的动态特性使该方法不必对环境分区即可适用于各种场景。
所提方法已应用于多个工业项目,本文基于一些制造业项目进行实验。理论分析和实验结果表明所提算法是有效和高效的。
作者: 邢子超,汪星恺,王硕,吴维敏,胡瑞芬

编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
轮式移动机器人电机驱动系统的研究与开发2025-06-11 382
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 793
-
移动机器人的三种主要运动系统2021-09-01 2229
-
什么是移动机器人软硬件系统问题2021-08-06 2490
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2980
-
如何实现移动机器人的设计?2020-11-23 3297
-
基于FPGA怎么实现三轮全方位移动机器人运动控制系统?2019-10-22 3090
-
想设计炫酷的移动机器人?视觉定位设计方案分享给你!2019-06-01 2926
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4118
-
Labview My RIO 移动机器人2016-08-21 13579
-
资料:移动机器人能否自动充电?2016-01-20 5157
-
移动机器人运动控制系统设计及控制算法研究2012-08-20 3494
-
轮式移动机器人WMR的运动分析2011-06-28 991
全部0条评论

快来发表一下你的评论吧 !
