

一文详解HUD基础知识
电子说
描述
01
HUD技术起源
抬头显示系统HUD(Head-up display)是一项从反射器瞄准器中演变而来的技术,二战前用在枪械瞄具和战斗机瞄具上。二战之后,HUD技术开始逐步应用到战斗机上,可将速度、高度、雷达信息、瞄准器等显示在战斗机的座舱罩或透明板上,飞行员不必低头,即可看到所需要的重要信息。
到了现代,战斗机上的HUD逐渐被头盔式显示器(HMDS)取代。
到了上世纪八十年代,通用汽车收购了航天和国防制造公司Hughes Aircraft,之后HUD技术开始在汽车上出现。1988年,通用汽车在Oldsmobile Cutlass Supreme Indy 500 Pace Car上应用了HUD,是世界上首款采用HUD技术的汽车。最初的汽车HUD系统显示的信息有限并且颜色单一。
自此之后,HUD系统开始逐渐装备在跑车和高档轿车中,且其技术开始朝着信息化、数字化的方向发展
02
HUD技术的意义
1. 提升驾驶安全性
正常驾驶时,人眼需要在道路和仪表之间来回切换,容易导致视觉疲劳和注意力分散。一项美国的研究表明,假设车辆行驶速度是120km/h,如果驾驶者的视线偏离路面2秒以上,车辆会行驶超过65m的距离。
HUD技术的最大意义就是可以让驾驶者不用将视线从路面上挪开就能获取大量的信息:驾驶员查看HUD上的信息,需要低头5°~10°,而查看组合仪表需要低头20°~25°。
2. 提升人机交互体验
除了提升驾驶安全性外,HUD技术还可进一步提升人机交互体验。一方面,HUD可让车况、智能驾驶等信息的显示更为高效;另一方面,HUD还可大幅增强导航的显示效果,使二维导航迈向实景导航。
随着人们对驾驶安全意识的不断增强,科学技术的不断发展,HUD系统会不断普及到中低档汽车中,让普通人也能享受到科技带来的安全享受。
03
HUD的分类
汽车HUD主要有三种类型:组合型抬头显示系统C-HUD(Combiner-HUD)、风挡型抬头显示W-HUD(Windshield-HUD)和增强现实型抬头显示系统AR-HUD(Augmented Reality HUD)。
1. C-HUD
C-HUD更多应用在后装市场,其会在汽车仪表上方、仪表板顶部加装一个半透明树脂板,再将该树脂板作为投影介质反射出虚像。该树脂板通常会根据成像条件进行特殊处理,例如做成楔形来避免反射重影,提升显示效果。
相较W-HUD和AR-HUD,C-HUD成本较低,但具有以下三方面劣势:
成像区域小,显示内容有限;
成像距离近,成像高度较低;
布置位置处于驾驶员前方的仪表板上,在车辆碰撞时可能会对驾驶员产生二次伤害。
2. W-HUD
W-HUD用于前装,目前有多条技术路线:基于曲面反射镜放大成像、基于全息光学元件(HOE)放大成像和基于全息光波导(Waveguide)放大成像。目前HOE和Waveguide技术尚未成熟,主要应用的为基于曲面反射镜放大成像技术。
W-HUD使用前挡风玻璃作为成像介质来反射成像,可以支持更大的成像区域和更远的投影距离。W-HUD的劣势在于,挡风玻璃通常为曲面反射镜,W-HUD必须根据挡风玻璃的尺寸和曲率去适配高精度曲面反射镜,导致成本相对较高。
3. AR-HUD
AR-HUD和W-HUD一样使用前挡风玻璃作为成像介质来反射成像,但AR-HUD成像区域更大、投射距离更远、成像也更为生动。
AR-HUD需要通过智能驾驶的传感器(摄像头、雷达等)对前方的路况进行解析建模,以得到对象的位置、距离、大小等要素,再把HUD显示的信息精准地投影到对应的位置。AR-HUD可将投射信息与交通环境进行高度融合,例如行驶过程中的车道线贴合、前方障碍物/危险物贴合、车道偏离预警与车道线贴合等。
因此现在的AR-HUD显示方式大多分为上下两层,下层是传统数据,上层是新增的辅助驾驶相关数据和指示画面。这也变成了区分传统W-HUD和AR-HUD的直接方式。
AR-HUD整体显示效果出众,是智能驾驶和智能座舱解决方案的重要组成部分。
虽然AR-HUD各方面性能都是最佳,但是体积最大,由于AR-HUD的光路需求比较大,体积就会增大,所以搭载该功能的车型都会在挡风玻璃后方挖一个大洞,这样看上去就没有那么美观了。同时目前AR-HUD技术还不够成熟,显示效果仍需提升。

04
HUD技术原理
一、基本原理
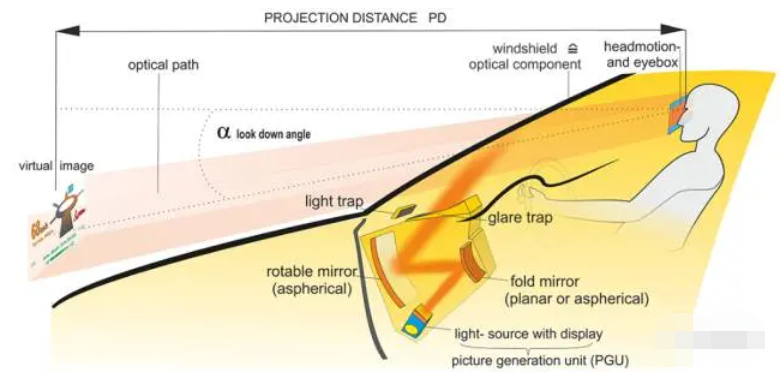
HUD本质上是一个光学器件,其工作原理与投影仪基本相同,就是将需要显示的信息投影到驾驶员前方的透明介质上。
HUD主要由图像生成单元(PGU)和光学显示系统两大部分构成,图像生成单元用以生成HUD输出图像,光学显示系统用于显示图像。
二、图像生成单元
图像生成单元PGU(Picture Generation Unit)是HUD最核心的部件,占HUD总成本的50%左右。图像生成单元的作用是生成HUD输出图像,由光源、光学膜片和其它光学组件构成。
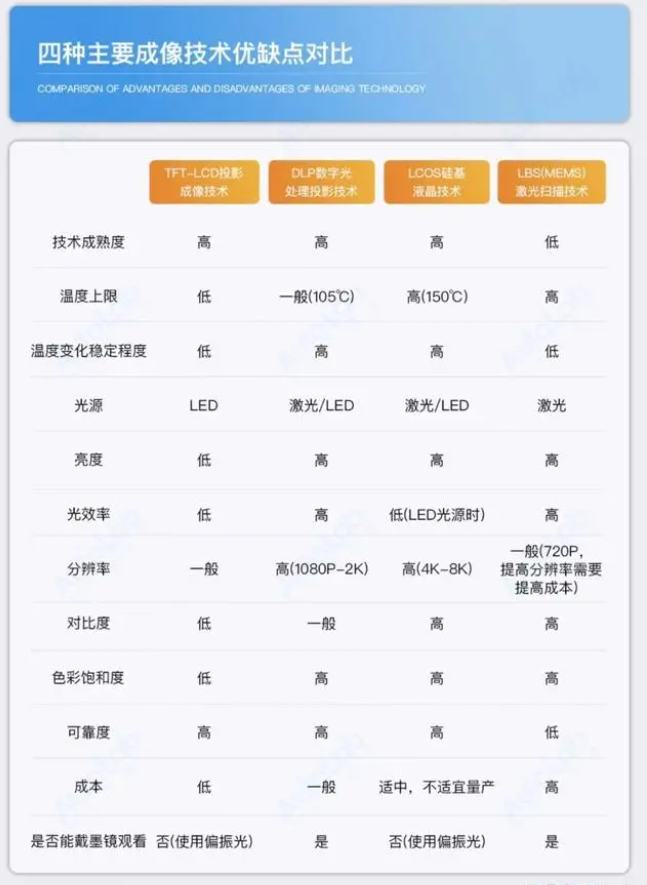
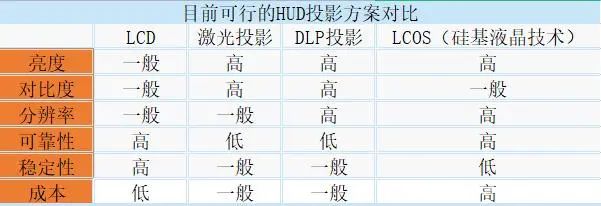
PGU是HUD的核心技术壁垒,其技术路线的选择直接决定未来的产业发展路线,影像源部分的成像技术主要分为TFT,DLP,LCOS和LBS这四种形式。不同的技术路线,其光源和光学组件都完全不同。
1. 薄膜晶体管液晶显示屏技术TFT-LCD
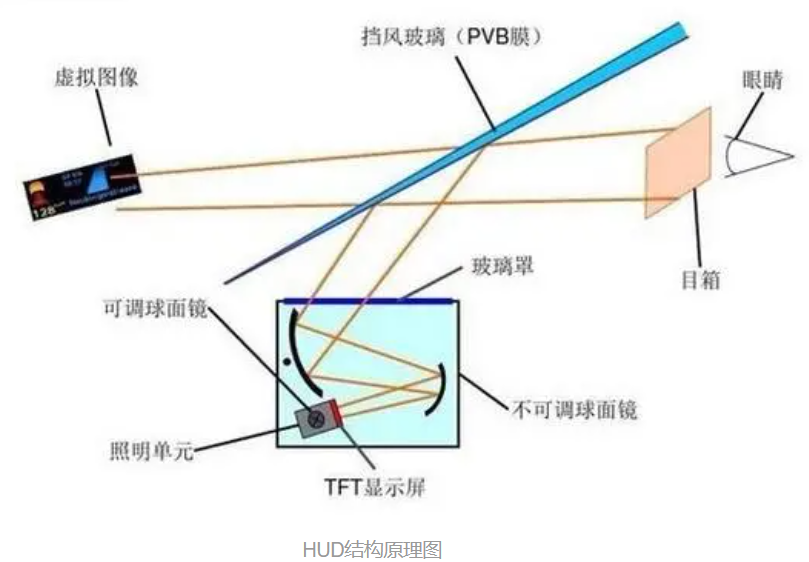
TFT是LCD液晶显示技术的一种,TFT-LCD的工作原理是LCD被背光光源照亮后,通过集成在LCD面板每个像素点背后的薄膜晶体管驱动液晶分子旋转改变光源偏振状态,从而呈现不同的明暗灰度,再通过RGB滤色片呈现彩色图像。
TFT-LCD可以做到高响应速度、高亮度、高对比度地显示图像信息,且技术成熟、成本低,是目前HUD的主流技术路线。
TFT-LCD技术的劣势主要在于热管理难度大,需要有更多热管理方面的光学设计。
2.激光投影
采用激光作为光源,因激光具有良好的单色性、方向性(聚焦效果好),所以它无需匹配LCD HUD方案中复杂的光学系统;
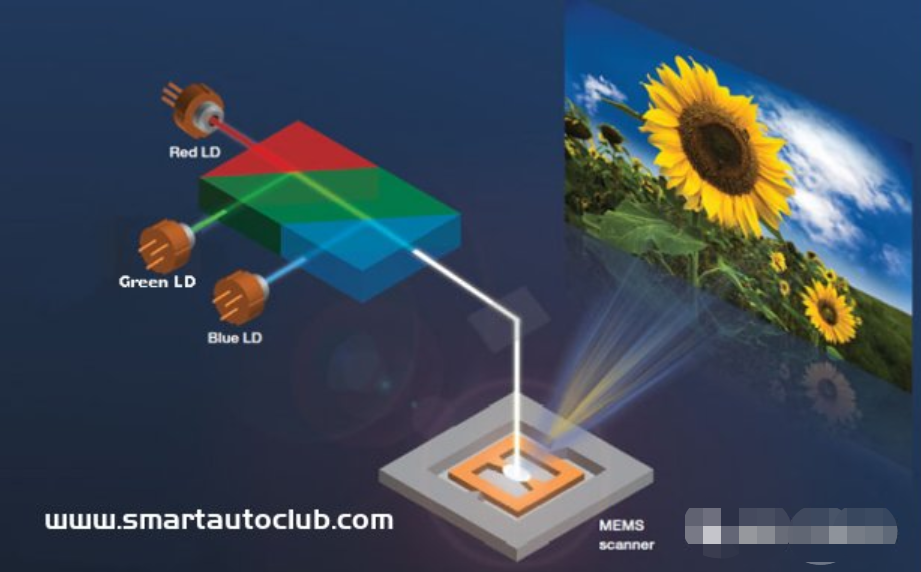
激光投影具有亮度高、饱和度高、衰减少、对比度好等特点,非常适合投影信息简单、亮度要求高的场景,目前主要应用于室外大型投影和演出上;
目前再制约激光投影在车载HUD上应用的一大障碍就是激光二极管对温度较为敏感,不能达到车规级要求的85°环境温度要求,也导致产品的稳定性不佳;
3.DLP投影
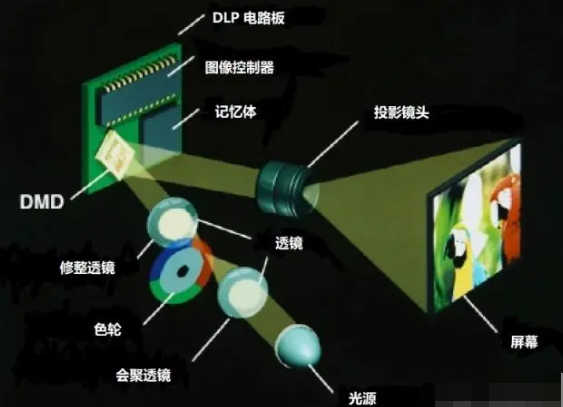
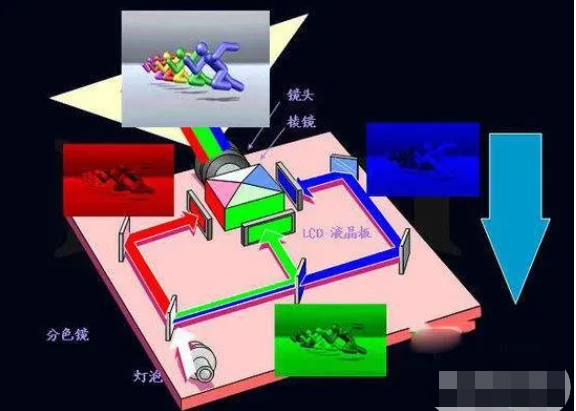
DLP全称是Digital Light Processing 数字光处理技术,它是集成上百万个超微型晶片(DMD),这些晶片首先对影像信号经过数字处理,然后再转为光投影出来;
DLP投影技术具有分辨率高、亮度高、成像效果好等特点,目前主要是被豪华品牌车型的前装HUD所采用
由于DLP是全平面投影,为了提升显示效果,就需要针对车型匹配高精度的反射非球面玻璃,无形中增加了很高的成本,而且后期的维修成本也不低,所以选装了原厂HUD的务必要买玻璃险;
国内的很多豪车基本选用这种方案,特别是宝马的HUD在市场的反馈还是非常好的,唯一的缺点就是选装成本有点高,后期的维修成本也不低;
4.LCOS投影
LCOS 全称 Liquid crystal on silicom 硅基液晶投影技术,看名字可能有点迷糊,
我们可以把它理解为一种LCD的升级,它采用涂有液晶硅的CMOS集成电路芯片作为反射式LCD的基片,
简单理解就是LCD以玻璃为基板,LCOS则以硅晶圆为基板;
LCOS在光效率上非常高,传统的LCD可能就3%左右,但LCOS则可高达40%;
三、光学显示系统
HUD的光学显示系统一般包括反射镜、调节电机及控制单元与前挡风玻璃。
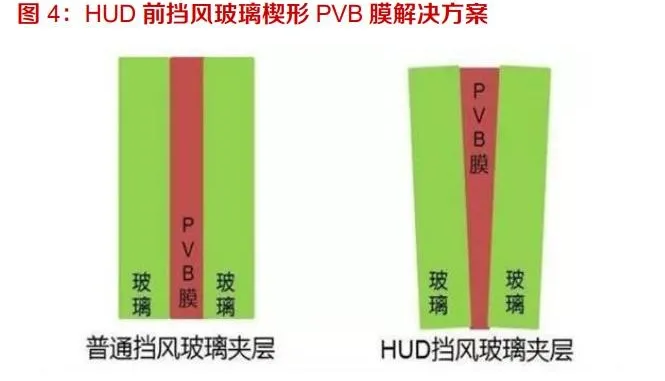
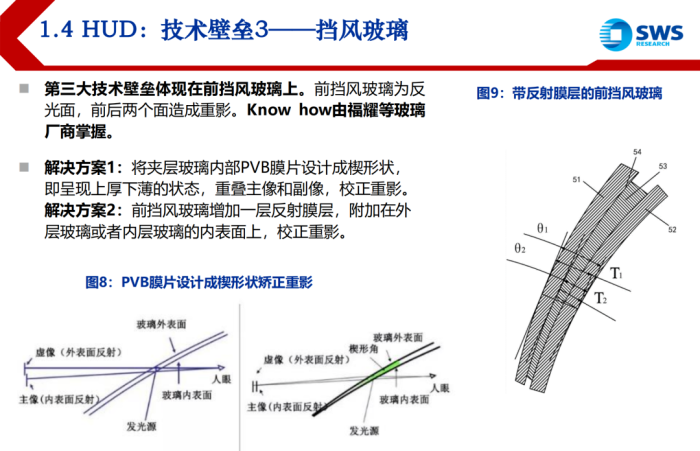
1. 前挡风玻璃
除C-HUD依赖放置于仪表板上方的树脂曲面镜成像外,W-HUD和AR-HUD都需要通过挡风玻璃成像。前挡风玻璃的结构有内外两层玻璃,内外两层玻璃之间存在一层PVB薄膜夹层。若将HUD图像通过普通挡风玻璃投射,在玻璃厚度和倾斜角度作用下,很容易行车虚像重影,投射效果差。
为了消除重影,目前的主流方案是将玻璃夹层内PVB夹层制成楔形,使玻璃呈上厚下薄的状态。
此外,还可以通过在外层玻璃或内层玻璃的内表面上附加一层反射膜层,用于校正重影。
2. 反射镜
反射镜和挡风玻璃需要进行拟合以尽可能消除画面畸变。自由曲面反射镜磨具需要用精密仪器制造,做成纳米级,非球面镜需要一次成型。

3. 控制单元
HUD的控制单元接入车辆数据总线,获取车速、导航、智能驾驶等信息,并在图像生成单元输出图像。
05
HUD显示内容
HUD的初衷是帮助驾驶员减轻认知负荷,提升对当前情势的感知能力。通常可在HUD上显示的信息包括:车辆信息和外界信息。
1. 车辆信息
车辆信息指能够反映当前车辆状态的信息,HUD一般通过车载总线获取,具体包括以下四类:
1) 核心信息指在传统仪表上显示的部分重要信息,如车速、转速、里程、油量等。
2) 提示信息指在车辆行驶过程中需要显示部分提示信息,如挡位、转向灯、远光灯、雾灯、车内温度、瞬时油耗等。
3) 报警信息包括请求驾驶员接管、安全带提醒、燃油/电量不足、发动机状态、车门状态、驻车状态、机油剩余量、胎压、安全气囊状态、玻璃清洗液存量等。
4) 附加信息指部分车型上的特色功能信息,如四驱模式、转向模式、驾驶模式、天窗及天窗开启状态、座椅状态、底盘状态等。
2. 外界信息
HUD除了可获取车辆自身的状态信息外,还可通过与外界的交互获取更多外界信息,具体包括:
1) 出行包含有定位、地图、导航、行人/障碍物检测、车道保持辅助等信息。
2) 安全主要显示来自智能驾驶系统感知到的实时交通情况,以辅助驾驶员安全驾驶,包括:超速预警、前车碰撞预警、车距信息提示、交通信号灯提示、道路安全预警、远程故障诊断信息等。
3) 生活主要指通过车联网获得的交通违章信息、保养信息、停车场车位信息、代驾预定等。
4) 智能办公如微信、邮件、电话、语音/视频会议、文档处理等。
5) 娱乐如音乐和电台的播放控制、音量控制、影音媒体播放及控制等。
二、 HUD显示设计
1. 布局原则
根据交互设计中的希克定律:一个人所面临的选择越多,做出选择所花的时间就越多,当面临选择的数量增加,做出决定的时间也会跟着增加。
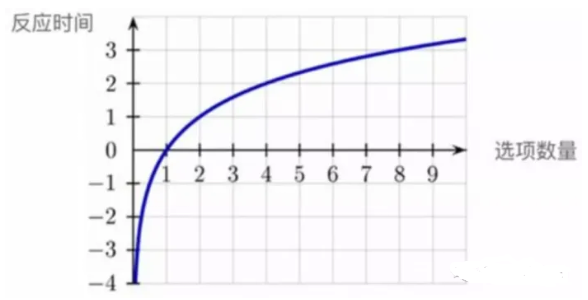
因此,HUD界面上实时呈现的主要设计元素数量最好保持在1-3个以内,呈现最关键信息的设计元素(或视觉元素组)数量最好只有一个。最快的获取关键驾驶车辆信息是HUD界面布局的出发点,使用过程中不需要驾驶员思考就能获取信息是最佳的设计。
2. 显示区域分类
根据所显示信息的重要程度,可将HUD的显示区域划分为三个部分:
核心显示区域:用于持续显示,或随行车情况的变化自动同步激活显示;
辅助显示区域:层级交替共享显示;
随机显示区域:基于车联网和大数据的实时信息,根据实时道路与车辆状态信息进行显示。
HUD界面上显示的内容与方式通常允许用户自定义,但为防止过多信息的显示给驾驶员带来视觉负担,要对显示的信息总量进行控制。
此外,大部分生活、办公、娱乐功能的信息不属于辅助驾驶界面的显示内容,可以将其设置为低车速或驻车状态下才在HUD虚像界面上显示,而此时它们可以占据核心功能显示的区域。这类界面可采用移动互联终端信息扁平化的模式来构建,以确保其操作的便捷。
06
如何鉴别HUD的好用程度
了解四种具体成像原理的优劣对比,我们可以从整体上看看如何鉴别HUD的好用程度,推荐大家看几个参数,成像距离和视场角。
HUD的成像距离越远,眼睛就不需要来回切换对焦,越不易产生疲劳,所以这个参数是越远越好。
视场角是水平和垂直两个角度,他们代表了投影的范围,结合成像距离,共同组成了大家经常在宣传中看到的“等效XX寸”的巨幕。
就和看电影一样,大家买票的时候一般都会偏向于全景影幕厅,并且选择中间偏后排的位置进行观看,这样能获得比较好的视觉体验。离屏幕的距离就像是“成像距离”,而视场角则决定了屏幕的尺寸,这两个参数决定了HUD的视觉体验。
目前AR-HUD凭借更远的成像距离,更大的投影视场角,成为了主流发展趋势。

综合对比下来,奔驰EQS和宝马740Li AR-HUD的视觉体验应该是最好的。
当然,这些影响要素还需要结合HUD本身的成像技术展现来进行综合评判,环境光线、使用时长和安装品控等等都能直接影响到用户的体验反馈,这也导致了目前很多用户对HUD功能褒贬不一的现象。
07
HUD光学模拟软件
TT-HUD软件测试套件,用于亮度、色度、对比度、MTF、鬼影、畸变、eyebox等指标光学性能的评估。
使用电控镜头和软件针对可变距离投影快速对焦,并自动计算出实际距离单位的VID值。
08
AR-HUD该具备哪些性能?
1、虚像距离VID>7.5m
2、视场角FOV>10°
3、亮度>12000cd/m2
4、消除重影
5、畸变矫正
6、良好的散热
7、消除光斑
8、前方道路融合
9、眼盒&驾驶员视线追踪
所谓“眼盒”,就是眼睛可移动的区域,如果眼睛位于这块区域内则能够看清整个图像,反之出了这块区域,则无法看全整个图像。
审核编辑:刘清
-
无功补偿原理基础知识详解2023-08-11 2049
-
多倍频程放大器的基础知识2023-06-15 1776
-
一文详解差分线的基础知识2023-03-22 8135
-
详解射频微波基础知识点2023-01-29 3672
-
一文详解arduino基础知识2022-01-19 1122
-
PLC入门必看基础知识2021-09-09 5563
-
FAT32文件系统基础知识2021-06-11 1078
-
机器视觉基础知识详解模板2021-05-28 1204
-
【转】变压器基础知识_制作流程_详解2018-08-05 4489
-
FreeRTOS基础知识详解pdf下载2018-03-29 1591
-
阻抗匹配基础知识详解 简直新手的好老师超级详细2015-04-08 3382
-
射极耦合逻辑(ECL)基础知识详解2009-08-07 3927
-
安防技术基础知识名词详解大全2008-12-29 1135
-
电子元器件基础知识详解2007-10-08 2174
全部0条评论

快来发表一下你的评论吧 !
