

相机标定,你还没读过张正友标定法吗?
描述
论文题目:Flexible Camera Calibration By Viewing a Plane From Unknown Orientations
作者:Zhengyou Zhang
作者机构:张正友老师现在已经是受聘腾讯历史上最高专业职级——17级研究员/杰出科学家
论文链接:Flexible Camera Calibration By Viewing a Plane From Unknown Orientations
以下是维基百科对张正友老师的评价:
张正友标定方法是一种经典的相机标定方法,目前是最受欢迎的方法之一。该方法通过一种机器学习的方法,利用大量匹配的数据点像素坐标、世界坐标,基于极大似然估计拟合得到一个最优解。作者提出了一种基于平面模式观察的灵活相机标定技术,包括一个闭合解和基于最大似然准则的非线性优化程序。通过该技术能够建立径向镜头畸变模型,同时实现相机校准。该技术的优势在于灵活易用、不需要昂贵的设备,适用于实际应用。其实现对于将三维计算机视觉技术从实验室推广到实际场景应用具有促进作用。
1 前言
本文的研究背景是建立在摄像机校准技术的基础上,提出了一种新的技术,在不需要高昂成本设备(如正交平面)的前提下,让普通计算机使用者也能容易、灵活地校准相机,以获取2D图像对应的3D度量信息。该技术采用了平面模式观察的方法,获得了非常好的实验结果。相较于传统校准方法和自校准方法,该方法具有灵活性和鲁棒性。该技术的主要环节是基于最大似然法的非线性优化,需要估计内外参、以及镜头畸变等若干参数。
2 Basic Equations - 基础方程
2.1 符号表示法
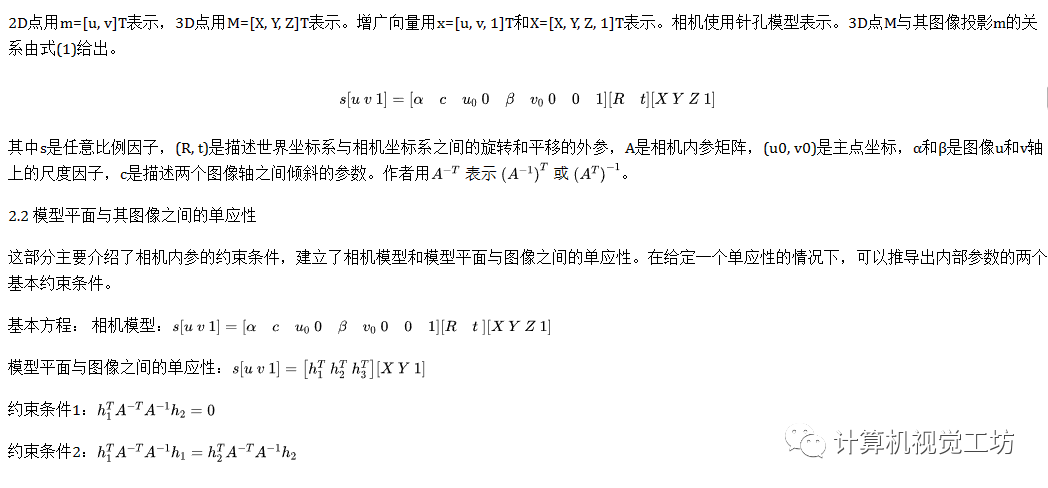
3 Solving Camera Calibration - 相机标定的解法
3.1 闭式求解
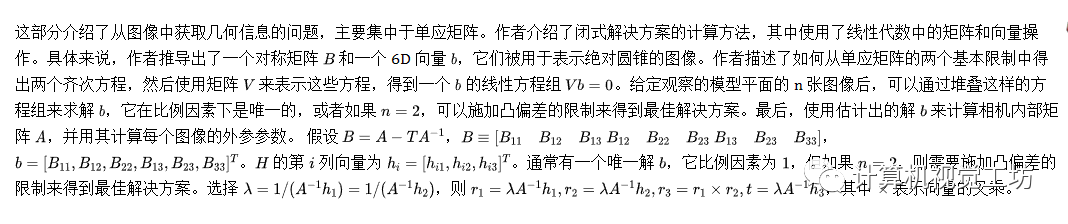
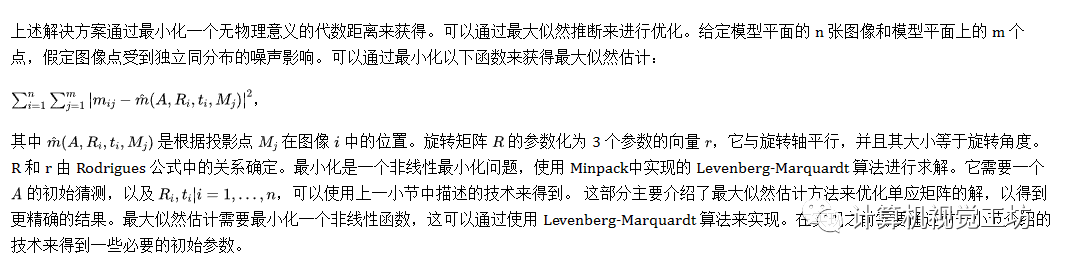
3.2 最大似然估计
3.3 处理径向畸变
这部分作者讨论了台式相机的径向畸变问题,主要讨论了径向畸变的前两项。当估计畸变系数时,可以交替考虑。通过最小二乘法求解可以求解径向畸变的系数。在获得畸变系数后,可以通过Levenberg-Marquardt算法优化其他参数的估计,以最小化估计误差的平方和。
4 实验
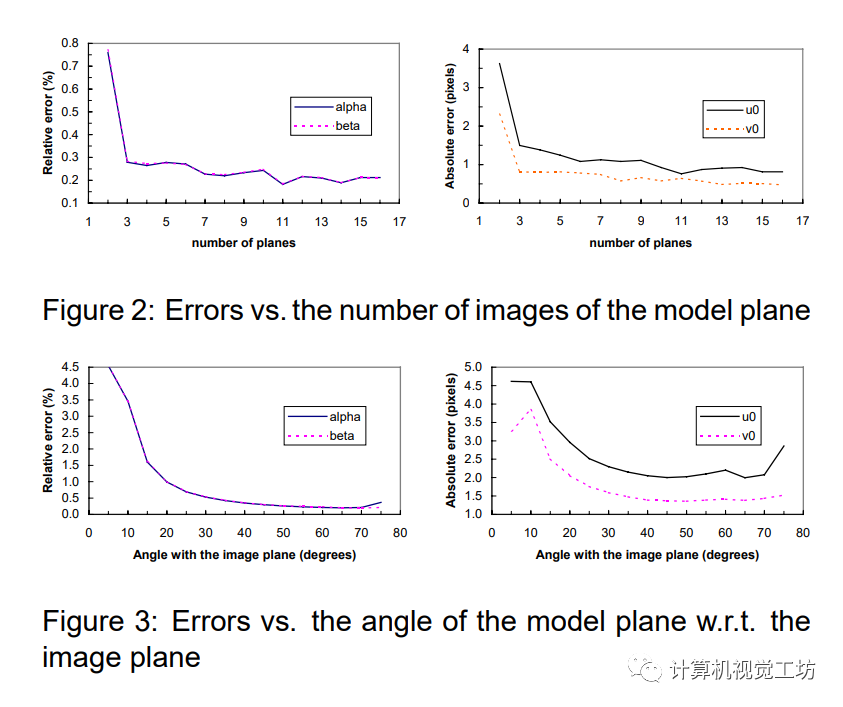
4.1 计算机模拟
作者通过小的矩阵的奇异值分解提出了一个有效的标定方法,可以通过计算机模拟数据和真实数据进行测试。在计算机模拟数据上进行了测试,可衡量相对误差和绝对误差。此外,还研究了模型平面方向和图像数量对性能的影响。最终结果表明,使用更多的图像以及较高的模型平面方向可以获得更好的结果。
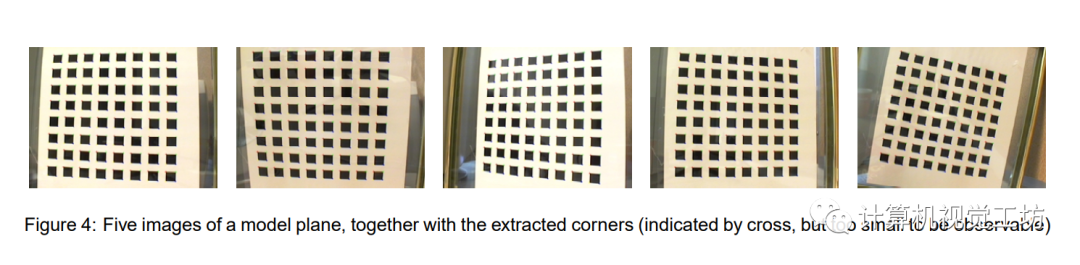
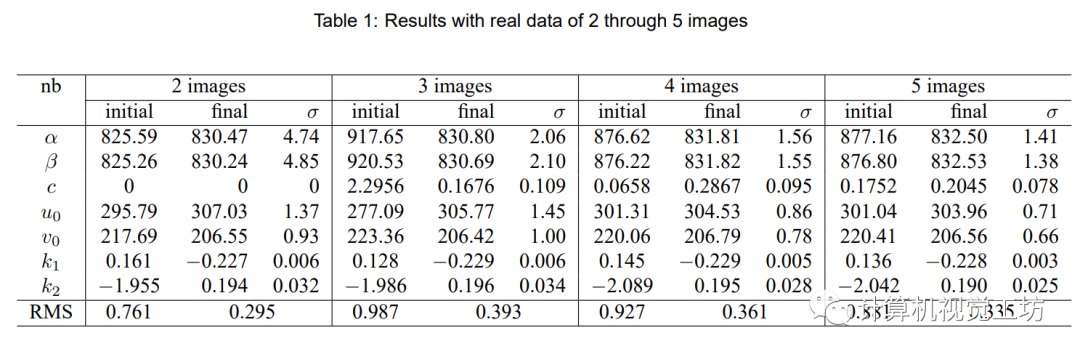
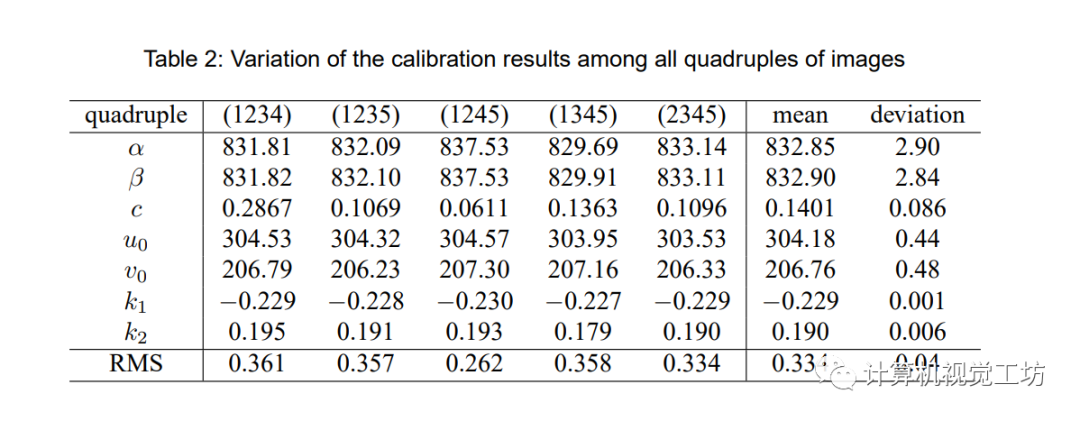
4.2 真实数据
实验结果表明,该方法在不同数量和方向的图像数据集上均表现出了稳定的校准结果,并且使用最大似然估计技术比使用闭式算法获得了更好的结果。此外,实验还证明了该方法可以应用于图像建模中,生成具有准确重建构建的茶罐模型,增强了实际应用领域的应用前景。这个基于平面标定的方法可以很好地解决相机成像中的畸变问题,具有重要的实际应用价值。
5 总结
张正友老师提出的这种一种快捷、精确、灵活的基于平面标定的相机标定技术。该技术结合了闭式解和基于最大似然标准的非线性精炼方法,能够高效准确消除径向畸变,提高图像成像的质量。该技术只需要相机观察不同方向的平面模式,不需要了解其运动状态,从而极大地提高了标定的灵活性。实验结果表明,该算法具有优异的性能,可广泛应用于计算机视觉领域中需要相机标定的应用场景。
tips1:
常见的相机标定方法有以下几种:
棋盘格标定方法:使用棋盘格图案通过相机拍摄多幅图片,然后根据拍摄到的图案,在图像中计算出相机内外参数。
自然场景标定方法:利用自然场景中的一些几何特征(如墙角、边缘,桌子等)进行标定。需要使用特定的算法来检测这些特征点。
物体特征点标定方法:在标定过程中首先需要获得待测物体的三维模型,然后通过相机对物体进行多个角度的拍摄,根据拍摄到的图像和对应的三维模型计算相机内外参数。
tip2:
在进行相机标定时,需要注意以下几个方面:
采集图像时应该尽可能地涵盖标定物体的各个角度、位置和姿态,以获得更精确的标定结果。
拍摄时应该保证标定物体平整、稳定,摄像机与标定物体之间保持一定的距离,防止标定物体在拍摄过程中发生变形或偏移。
在对图像进行处理前应该保证图像的亮度、对比度等参数良好,可以通过调整曝光时间、光源等来控制图像质量。
图像处理过程中需要进行畸变校正,即对图像进行去除透镜畸变的处理,以获取更准确的图像特征点。
标定时需要根据实际情况调整标定算法的参数,例如棋盘格标定中棋盘格格子数、格子大小等。
欢迎关注微信公众号「3D视觉工坊」,加群/文章投稿/课程主讲,请加微信:dddvisiona,添加时请备注:加群/投稿/主讲申请
tips3:
如何分析相机标定参数的好坏:
重投影误差(reprojection error):重投影误差是指将已知的三维标定棋盘图像点投影回对应的二维图像坐标上,再计算投影点与实际图像点之间的误差。通常情况下,重投影误差应该小于标定图像分辨率的1/10。
相机内部参数矩阵:相机内部参数矩阵包括焦距、主点、畸变系数等,这些参数与相机的像平面和成像质量密切相关。较好的标定参数应该可以准确地反映出相机成像的精度和畸变情况。
畸变校正效果:畸变是相机成像过程中不可避免的问题,因此需要对标定参数进行畸变校正。好的标定参数应该能够使校正后的图像达到较好的几何形态,如直线应当是直的、圆应当是圆的等。
极线校正效果,双目标定极线矫正的结果也可以通过观察差异方便地评估好坏。在未经过极线矫正的图像中,同一物体在不同视角下呈现出不同的像素位置,而经过极线矫正后,两个相机的图像中对应的物体像素位置会在各自的极线上呈现出相同的位置,
相机外部参数矩阵:如基线在出厂的时候应该符合相机厂商提供的规格,故也可以通过基线的误差来判断双目相机标定的参数效果。
总的来说,好的相机标定参数应该能够保证相机成像精度、畸变校正效果以及逻辑合理性。
审核编辑 :李倩
-
基于主动视觉的相机标定法知识整理2022-10-12 3823
-
相机标定——张正友文献原文2018-05-04 7221
-
基于B-dual-space的摄像机标定2011-11-30 570
-
摄相机标定介绍2016-09-22 904
-
opencv相机标定原理与步骤2017-12-04 19340
-
遗传算法的单目相机标定2018-01-05 911
-
结构光视觉的优点和标定方法分析2020-08-31 6167
-
张正友教授相机标定法原理与实现2020-12-31 8005
-
相机标定含义(解决什么是相机标定)2022-06-21 9545
-
张正友标定算法是什么意思2022-08-22 4572
-
张氏标定法的原理和实现2022-11-14 5603
-
如何学习相机模型与标定?2023-06-01 1722
-
张正友标定方法是手眼标定吗 如何分析相机标定参数的好坏2023-08-03 2187
-
组合导航系统中里程仪快速标定法2023-10-26 557
-
基于DCC和张氏标定的相机镜头畸变校正2024-08-29 636
全部0条评论

快来发表一下你的评论吧 !
