

 Linux哪吒D1的NodeRed机械臂控制与拍照(一)
Linux哪吒D1的NodeRed机械臂控制与拍照(一)
描述
一、 背景
设备控制安全一直是我最想解决的一个问题,这就需要创建个人服务器,最大限度的保障安全。为了能够实现安全控制和控制速度。我想到了Node-Red来解决这个,它提供了丰富的节点,可以实现你想要的功能,例如USB摄像头,串口,mqtt等都可以轻松实现,但是就需要写一些js代码。
关于机械臂的部分主要是用舵机来控制,是通过一块单片机板子来实现驱动,那么node-red则通过串口与板子进行串口通讯实现对舵机的控制。
二、方案功能汇总如下:
1、腾讯连连的MQTT节点连接腾讯云
2、驱动海康威视摄像头实现摄像头拍照功能并显示的在页面上
3、node-red的串口节点与单片机通讯
4、进度条功能实现实时输出串口数据控制舵机
5、设置方向控制按钮
三、硬件设计
1、硬件主要有哪吒D1开发板,运行Debian linux操作系统
2、海康威视摄像头,实现监控
3、单片机开发板:STM32L431RCT6
4、5个舵机:通过PWM控制,其中一个用来控制转向
5、1个电机:通过MOS管驱动
四、软件设计
连接腾讯云平台:
登录后选择控制台

选择物联网开发平台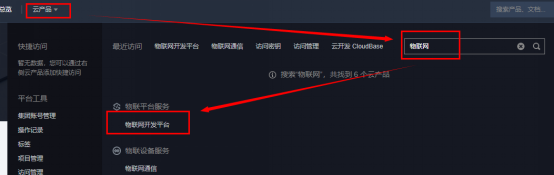
创建项目:

创建产品:

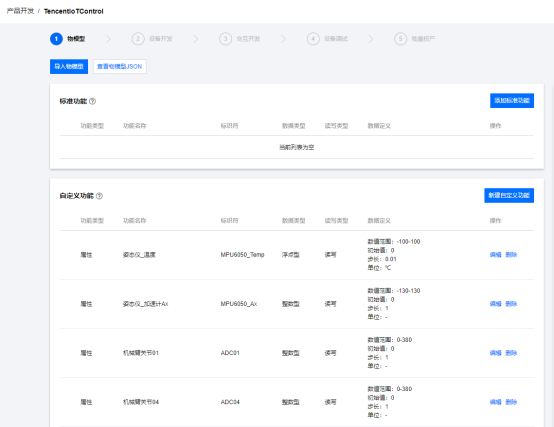
设置数据模板:
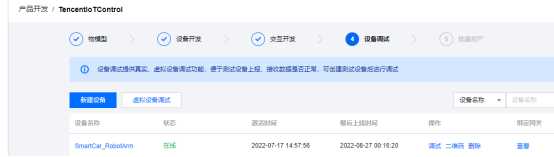
创建设备:
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
哪吒D1 TinaSDK添加SSH server功能2023-08-28 1956
-
d1哪吒开发板的启动流程分析2023-08-16 898
-
Linux哪吒D1的NodeRed机械臂控制与拍照(二)2023-05-17 4890
-
全志20210520定位图D1哪吒开发板2022-10-19 680
-
哪吒 D1 通过 TF 卡运行 Arch Linux RISC-V rootfs2022-08-31 5727
-
D1哪吒开发板rt-smart内核固件的烧写与运行步骤2022-06-17 3077
-
20210520定位图全志D1哪吒开发板2022-03-21 742
-
机械臂的控制学习2022-02-23 2638
-
D1哪吒开发板是什么?有何作用2022-02-11 1261
-
如何在D1哪吒开发板商适配或者移植阿里小程序呢2021-12-28 1203
-
想做一个底盘加机械臂的移动机械臂,有感兴趣的或者给点建议的朋友吗?2017-04-26 6869
全部0条评论

快来发表一下你的评论吧 !
