

自动驾驶感知系统常用方案
电子说
描述
自动驾驶汽车是汽车电子、智能控制以及互联网等技术发展融合的产物,其原理为自动驾驶系统利用感知系统,获取车辆自身以及外界环境信息,经过计算系统分析信息、做出决策,控制执行系统实现车辆加速、减速或转向,从而在无需驾驶员介入的情况下,完成自动行驶。
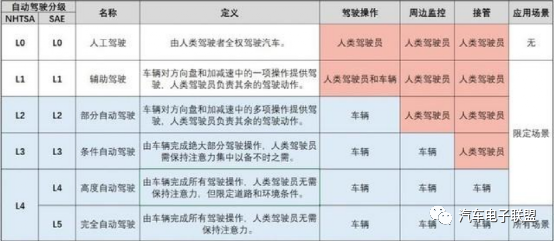
2013年,美国国家公路交通安全管理局(NHTSA)根据辅助控制系统的自动化功能,将自动驾驶技术分为0~4级,如下图所示。从下图可了解到,自动驾驶的发展升级是从辅助驾驶到主宰驾驶,从提供单一功能、应对简单场景,到可掌控所有场合,完全解放驾驶人。期间感知系统需不断提高获取周边环境信息的全面性、准确性和高效性,它是自动驾驶的基础,也是贯穿升级的核心部分。
本文将介绍自动驾驶感知系统常用方案,及其各自技术方法、特点和应用情况
本文图片数据来源于网络,侵权删
整体架构
自动驾驶汽车首先应有一套完整的感知系统,代替驾驶人的感知,提供周围环境信息;其次应有一套集智能算法、高性能硬件于一体的控制系统,代替驾驶人的大脑,制定驾驶指令、规划行驶路径;最后还需一套完善缜密的决策系统,可以代替驾驶员的手脚动作,执行驾驶指令、控制车辆状态。其中,感知系统应包括物体识别,定位。主要是通过雷达,摄像头以及装载在车上的各类传感器实时产生的数据,实时获取周边物体、行驶路况、导航定位、天气、停车场等信息。决策系统则是通过对获取信息的判断和复杂算法逻辑来执行相应的车辆指令,例如跟车,刹车,变道,超车等。控制系统则是通过决策的指令对车辆控制,执行相对应的状态,如控制油门开度,方向盘角度,制动踏板开度等。
本文主要介绍的是感知系统。

**
感知系统**
感知系统目的包括:①安全性:实时、准确识别周边影响交通安全的物体,应对突发事件,为采取必要操作以避免发生交通安全事故;②通过性:基于自身行驶性能、周边路况和共识规则,能够实时、可靠、准确识别并规划出可保证规范、安全、迅速到达目的地的行驶路径;③经济舒适性:为车辆高效、经济、平顺行驶提供参考依据。目前,感知系统主要是利用传感器、定位导航 、车联通信(VehicIe-to-X,V2X)3种技术组合实现上述目的。
1传感器
传感器感知的对象包括行驶路径、周围障碍物和行驶环境等。感知行驶路径是对可通行性道路的识别,在城市中包括信号灯、各种标志牌、车道线、路障等目标的识别;在野外包括车辆前方路面平坦情况、可通行道路分析等。感知周围障碍物是识别影响自动驾驶车辆行驶的静止或者移动的各种障碍物,包括路面上的车辆、行人、路障等。感知行驶环境是判别对自动驾驶车辆行驶影响比较大的变化环境,例如路面、交通与天气等。
主流的传感器感知技术包括视觉感知、激光感知、微波感知等。视觉感知是基于摄像头采集的图像信息,使用视觉相关算法进行处理,认知周围环境;激光感知是基于激光雷达采集的点云数据,通过滤波、聚类等技术,对环境进行感知;微波感知是基于微波雷达采集的距离信息,使用距离相关算法进行处理,认知周围环境。3种环境感知方法的比较如下表所示。根据各类传感器技术特点,不同应用场景和系统功能需求下,应选不同的传感器技术。例如,在高速公路环境下,由于车辆速度较快,通常选用检测距离较大的微波感知;在城市环境中,由于环境复杂,通常选择检测角度较大、信息量丰富的激光、视觉感知技术。
| 方法 | 优点 | 缺点 |
|---|---|---|
| 视觉感知 | 信息量丰富,实时性好,体积小,能耗低 | 易受光照环境和运动速度影响,三维信息测量精度较低 |
| 激光感知 | 直接获取物体三维距离信息,观测精度高,对光照变化不敏感 | 体积较大,价格昂贵,无法感知无距离差异的平面内目标信息 |
| 微波感知 | 对光照变化不敏感,直接获取物体三维距离信息,数据精度高,实时性好,体积小 | 无法感知无距离差异平面内目标信息想 |
现在广泛应用的各类高级驾驶员辅助系统ADAS使用各类传感器,实现了相应的辅助驾驶功能,为实现完全自动驾驶奠定了基础,如下图所示。但单一传感器获取周围信息时,安全性、整体性都相对较差。随着传感器和信息融合技术的快速发展,不同传感器信息在时间和空间维度上的高精度数据融合成为可能,多传感器融合技术趋于成熟。它可更精确地获取目标信息,完成障碍物的检测,是未来研发和应用的趋势。目前,参与欧盟PROTECTOR计划的主要汽车厂商已开始研究雷达传感器(激光雷达、微波雷达)和光学传感器 (普通光学摄像头、红外摄像头)的融合技术,开发了行人安全检测系统。

2定位导航
传感器感知系统虽然可以为自动驾驶汽车提供周边环境信息,但难以实现全局环境的高精度定位,在大范围环境感知、规划行车路径、经济舒适驾驶等方面存在不足。定位导航系统应用车辆定位技术、地理信息系统(Geographical Information System,GIS)、数据库技术、信息技术、多媒体以及远程通信技术,为车辆提供全局定位、路线设计、路径引导、综合信息等功能,将车辆与环境有机结合,实现超视距感知辅助,规划行车路径,提高行驶平顺性、经济性。定位导航系统首要功能是提供车辆位置、速度、航向等信息,而精确、可靠的车辆定位是实现导航功能的前提和基础。常用的定位技术主要有卫星定位、惯性导航(Inertial Navigation System,INS)、航迹推算(Dead-Reckoning,DR)、地图匹配(Map Matching,MM)和传感器感知等技术。其中,主要的卫星定位系统有美国的全球导航卫星定位系统(GPS),欧洲空间局的伽利略定位系统(NAVSAT),俄罗斯的格洛纳斯定位系统 (GLONASS),中国的北斗2代定位系统。常见的定位导航方法包括高精度GPS导航、磁导航、惯性传感器导航,其特点对比见下表。基于任何一个单一定位技术的系统都有本身无法克服的短处,随着应用场合与环境的不断复杂变化,组合定位导航系统成为研究应用热点。
| 方法 | 优点 | 缺点 |
|---|---|---|
| GPS导航 | 全天候,全球性,无积累误差,三维定位精度高 | 数据更新频率低,载体高速运动,受遮挡时,易丢失卫星定位信号,导致误差大,甚至无法定位 |
| 磁导航 | 稳定可靠,定位精度高,不受温度,天气及周边环境影响 | 道路铺设导线成本高,不易在城市道路广泛推广,长距离电磁导航需要消耗大量电能 |
| 惯性导航(INS) | 独立导航性,数据更新率高,短期精度高,全天候工作,良好的隐蔽性和较强的抗干扰性 | 误差随时间积累,长时间使用导航精度降低 |
1)GPS/INS组合导航技术是目前最常见的组合导航系统之一,它利用INS短期定位精度与数据采样频率较高的特点,为GPS系统提供相关辅助信息,使GPS能够保持较低的跟踪宽;GPS相对高精度的输出信息可以估计出INS系统的误差参数,并控制其随时间的积累误差。简而言之,GPS输出的位置和速度信息有利于提高INS导航解算精度,而INS可以在GPS卫星信号覆盖不好的区域或位置,短时间内提高组合导航系统的精度。
2)GPS/INS/GIS组合导航技术是在GPS/INS系统获取车辆定位信息后,进一步通过GIS系统中地图匹配算法将定位数据与电子地图进行匹配,对车辆位置进行实时加权修正。该组合导航技术能有效克服GPS信号长时间受阻、定位间断或失效时,惯性导航定位误差积累偏大的问题,提高了导航定位的精度、扩展了使用范围。同时,此技术不用增加额外的车载硬件设备,仅仅通过软件的方法即可提高车辆的定位精度,降低了导航系统的成本。但需要满足以下2个条件:①车辆始终行驶在路网中的道路上;②电子地图数据误差小于GPS定位误差。
3)高精度智能地图导航技术是在高精度地图基础上,通过云端数据库既提供包括高速公路、城市道路、交通信号标志等永久数据,又提供交通路况、临时交通管制、重要路段人流数据分析等动态数据。结合自动驾驶汽车自身的传感器信息,充分实现宏观道路匹配、微观精确定位以及动态全局环境感知。其中,高精度地图主要是利用摄像头采集图像、激光雷达3D扫描、GPS定位轨迹等技术,整合多种数据搭建道路三维模型,包含了路网结构、道路标线、交通标志、路边街景等海量数据;云端数据库不断收集路上行驶车辆传送来的最新信息,经过分析确认后,更新高精度地图,并将信息发送给其他车辆。
目前,美国谷歌公司,德国奥迪、宝马、戴姆勒联手收购的Here,中国阿里巴巴收购的高德,荷兰TomTom等地图公司,日本丰田、日产汽车公司,以及德国大陆、博世等顶级汽车零部件公司,均在开发适合自动驾驶的高精度地图。比如谷歌车队使用激光扫描仪和GPS以及其他传感器来绘制周围环境图;宝马将激光扫描仪安装在前保险杠下面,用来生成车辆前方的路况信息;博世使用雷达和超声波传感器、立体声摄像机和一个安装在车顶的旋转激光扫描仪来收集数据,生成详细的周围环境3D地图;丰田将GPS数据信息和地面摄像头获取的图像打包发送至数据中心,将二者整合、更新,最终形成一套高精度的地图。
3车联通信
车联通信( VehicIe-to-X , V2X ) 是一种强调数据交换的无线通信技术。用以实现车与车( VehicIe-toVehicIe , V2V ) 、车与基础设施( VehicIe-to-Infrastructure , V2I ) 、车与人(Vehicle-to-Pedestrians,V2P)、车与骑行者等之间的信息交换。V2X技术是车联网的基础,它能够使车与车、设施、行人进行对话,将各自信息进行交换,为自动驾驶提供先验信息,提高环境识别效率和准确率,消除视野盲点安全隐患,起到提高车辆运行安全和疏导交通流量等作用。NHTSA曾预测,对于中轻型车辆V2V安全技术能够避免80%的交通事故,重型车V2V安全技术能够避免71%的交通事故,V2I能够避免12%的道路安全事故。通过V2X车联网能够有效降低交通事故造成的损失。
支持车辆在高速移动的环境下实时可靠通信的无线通信技术是V2X车联网实现的基础,它直接决定了信息交互的实时性和有效性。
NHTSA提出的V2X车联网通信技术的通信需求包括:
①极短的网络接入时间;
②低传输时延;
③高传输可靠性;
④高信息安全性和隐私保护;
⑤在有限的范围内,使频谱再利用和低干扰;
⑥拥有足够的通信带宽。
具体指标为:
①时延要求在100ms左右;
②典型传输距离为50~500m;
③车车通信的数据包大小在100字节内;
④车路通信的数据包大小在340字节内。
各国的研究组织和企业基于目前专用短程通信(Dedicated Short Range Communication,DSRC)、WiFi、蜂窝网络、微波存取全球互通( Worldwide Interoperability for Microwave Access , WiMax ) 、长期演进( Long Term Evolution,LTE)等通用无线通信技术,提出了多种针对上述要求的技术方案。其中,DSRC技术具有传输速率高、延迟短、支持点对点、点对多点通信等特点,且技术成熟度和标准化水平高,是目前主流的V2X车联网无线通信技术。
下表为常用无线通信技术比较。
| 参数 | DSRC | WIFI | 蜂窝网络 | WiMax |
|---|---|---|---|---|
| 时延 | <50ms | 秒级 | 秒级 | / |
| 通信距离 | <1Km | <100m | <10Km | <15Km |
| 传输速率 | 3~27Mbit/s | 6~54Mbit/s | <2Mbit/s | 1~32Mbit/s |
| 通信宽带 | 10MHz | 20MHz | <3MHz | <10MHz |
| 工作频率 | 5.8~5.9GHz | 2.4/5.2GHz | 0.8/1.9GHz | 2.5GHz |
| IEEE标准 | 802.11p | 802.11a/b/g/n | / | 802.16e |
DSRC一般泛指所有短距离的无线通信技术,包含不同的技术和标准,主要工作在5.85.9 GHz频段之间,包括专用短程通信协议 、路侧单元(Road Side Unit,RSU)、车载单元(On BoardUnit , OBU ) 三部分。早在1999 年, 美国联邦通信委员会已规定5.9GHz 频段( 5.8755.925GHz)专门用于车联通信研究。根据美国制定的DSRC标准,DSRC通信协议下层的物理层和介质访问控制层(Medium Access Control,MAC)采用IEEE 802.11p协议,上层采用IEEE 1609协议。其中,IEEE 802.11p是针对V2X车联网对高数据速率和高速移动性的通信要求,基于IEEE 802.11标准设计的一个通信标准。它改进了信息传输机制、支持高速移动互联、增强了安全性和身份认证。IEEE 1609协议是以IEEE 802.1lp通信协议为基础的高层系列标准,用于提供资源管理、应用程序和管理信息安全加密、网络服务、通道协调。
下图为DSRC协议对应结构

目前,DSRC在美国、欧洲、日本等地历经十多年发展,已在多个国家级项目中研究推广,如美国IntelliDrive 项目、欧洲CVIS ( Cooperative Vehicle Infrastructure Systems ) 项目、日本Smartway计划,并且美国电气和电子工程师协会、欧洲电信化标准协会、国际化标准组织均制定了近似的通信标准。企业方面,恩智浦、意法半导体等半导体供应商,大陆、德尔福等零部件供应商都开发了相应产品;通用汽车宣布将在2017年款凯迪拉克CTS上率先搭载采用DSRC技术的V2X系统,通过与GPS相结合,该系统能够精确获取周围300m内其他车辆的准确位置和行驶状况。
总结
感知系统将真实世界的视觉、物理、事件等信息转变成数字信号,为车辆了解周边环境、制定驾驶操作提供了基本保障。本文从传感器、定位导航、车联通信3个技术方向介绍了感知系统。其中,传感器技术能够及时、快速掌握局部范围内各种人车路信息,有效应对周边突发事件;导航定位可确定车辆与路网其他单元的位置关系,提供全局视野,用于规划路径、优化驾驶体验;车联通信可使人、车、路信息互联共享,实时准确地大范围、全方位感知环境信息,有效弥补传感器感知范围有限、易受环境影响,定位导航感知实时性差、感知内容有限等缺陷。目前,各大汽车制造商正致力于自动驾驶汽车实用化研发和商业化推广。多种技术融合的感知系统是实现高等级自动驾驶的关键技术,很大程度上决定着自动驾驶发展进程,间接影响着将来自动驾驶汽车的产品标准、试验测试方法、安全等级评价等产业市场规则,以及交通规划、车辆及驾驶人管理等社会治理规则。
-
未来已来,多传感器融合感知是自动驾驶破局的关键2024-04-11 2420
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8404
-
细说关于自动驾驶那些事儿2017-05-15 7237
-
自动驾驶的到来2017-06-08 7479
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 6159
-
高级安全驾驶员辅助系统助力自动驾驶2018-09-14 3476
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3321
-
如何让自动驾驶更加安全?2019-05-13 3788
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3312
-
自动驾驶汽车中传感器的分析2020-05-14 3636
-
UWB定位可以用在自动驾驶吗2020-11-18 3699
-
网联化自动驾驶的含义及发展方向2021-01-12 4961
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2489
-
自动驾驶技术的实现2021-09-03 3268
-
自动驾驶感知系统常用方案,及其各自技术方法、特点和应用情况2019-03-14 15036
全部0条评论

快来发表一下你的评论吧 !
