

MGT-PR小鼠步态行为分析系统说明
描述
一、简介:
MGT-PR大小鼠步态行为分析系统(gait)是指大小鼠行走时所表现的姿态。大小鼠步态分析系统基于原有足迹分析方法(footprint analysis),运用技术对足印分析法进行了改进,通过足印图像增强技术采用高速摄像机可以清晰地采集大小鼠行走过程的足印信息,然后利用步态分析系统自动识别分析大小鼠足迹的步行周期、支撑距离、支撑时长、摆动时长、制动时长、推进时长、步频等60余种指标,以此客观、准确和全面地反映动物步态的变化情况。而且本步态分析系统集数据采集、监测、分析、统计处理、绘图制表、打印输出于一体,避免繁重的人工劳动,提高实验的自动化程度。本仪器可应用于脑缺血、阿尔茨海默病、帕金森氏病、脑外伤、脊髓损伤、疼痛疾病、关节炎等多种疾病动物模型步态的研究。
 MGT-PR大小鼠步态行为分析系统
MGT-PR大小鼠步态行为分析系统二、技术亮点
1、厂商:安徽正华生物仪器设备有限公司,O561-6O623O7,
2、独立自主跑轮,由笼体,跑轮和智能长度计组成。
3、自主跑轮系统,小动物自主跑轮系统最多由多个独立自主跑轮及数据采集器、计算机与软件三大部分组成,系统可由 2 - 16 个
独立自主跑轮组成(任选)。标准配置由 8 个跑轮组成。
三、软件参数:
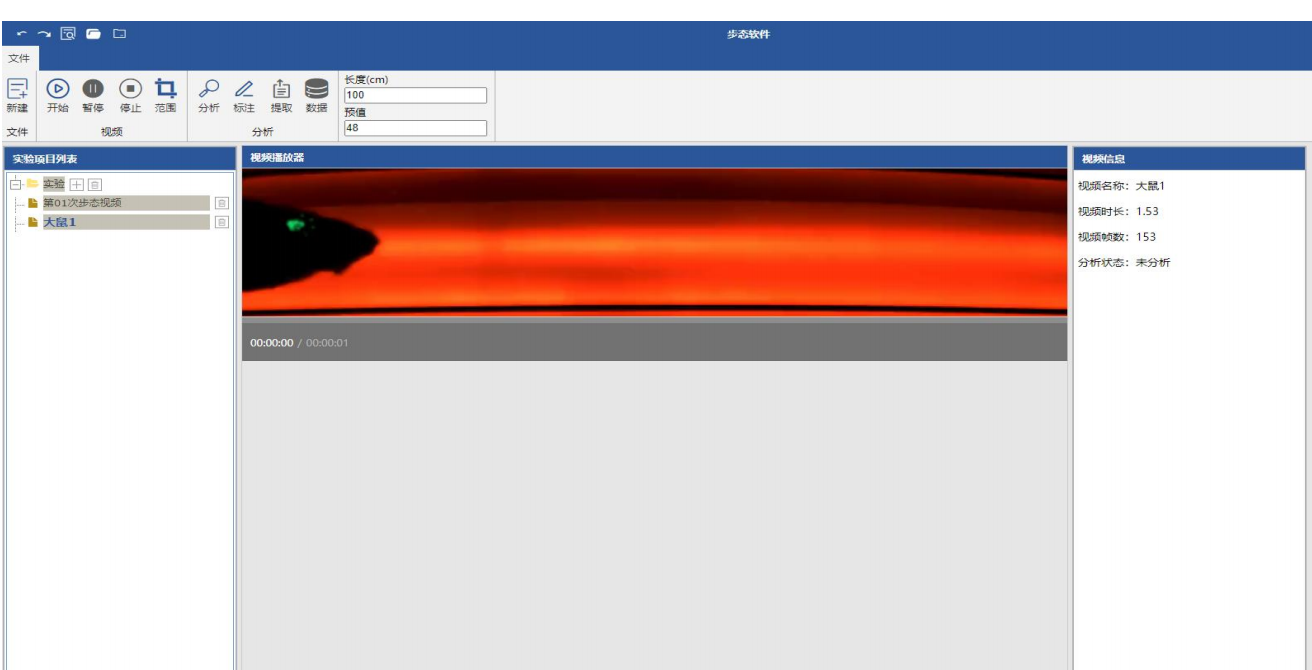
1、软件可以通过前端页面对未分析的实验小(大)鼠视频进行范围的选择。
2、软件可以使用算法识别分析实验小(大)鼠视频每一帧的脚印轮廓。
3、软件可以对正在算法分析的小(大)鼠视频并且完成后进行手工校验。
4、软件可以实现手工分析实验小(大)鼠视频每一帧的脚印轮廓。
5、软件可以通过图表或者可视化的形式进行指标数据的展示。
四、指标评价体系:
步行周期:动物行走时一侧足跟着地到该侧足跟再次着地的过程被称为一个步行周期,一个步行周期可分为支撑
相(stance phase)和摆动相(swing phase)。
支撑时长:在一个步行周期中始终与地接触的阶段。
摆动时长:在一个步行周期中始终与地无接触的阶段。
支撑时相:支撑时长所占步态周期的百分数(cycle%)作为单位来表达。
单支撑时相:通常指一足着地到该足离地的过程。
摆动时相:摆动时长所占步态周期的百分数(cycle%)作为单位来表达。
制动时长:从该足开始接触时刻到该足与地面最大接触面积时刻所需的时长。
制动指数:制动时长 / 支撑时长。
推进时长:从该足与地面最大接触面积时刻到该足离地时刻所需的时长。
推进指数:推进时长 / 支撑时长。
同源协调性:被观测足爪 (RH or LH) 的摆动时间或支撑时间与对照足爪 (LH or LF) 的步行周期的比值。
同侧协调性:被观测足爪 (RH or LH) 的摆动时间或支撑时间与对照足爪 (RF or LF) 的步行周期的比值。
对侧协调性:被观测足爪 (RH or LH) 的摆动时间或支撑时间与对照足爪 (LF or RF) 的步行周期的比值。
步幅:动物在一个步行周期中,同一前肢或后肢连续两个最大脚印横坐标中点之间的距离。
左侧步基:动物在一个步行周期中,左前肢连续两个最大脚印横坐标中点与左后肢连续两个最大脚印横坐标中点
之间的距离。
右侧步基:同上。
前肢步宽:在行走中左、右两足间的距离称为步宽,通常以足爪中点为测量参考点。
后肢步宽:同上。
足迹最大面积:t 为足爪接触地面的最大面积时刻,最大面积计算公式为:
足迹平均面积:每帧图像足迹面积之和 / 总帧数。
摆动速度:步长 / 摆动时间。
瞬时速度:每只爪子的步长 / 步行周期。
平均速度:在一次行走过程中瞬时速度的平均值。
总速度:在一次行走过程中,步长的总和 / 步长周期的总和。
- 相关推荐
- 热点推荐
- 仪器
-
大小鼠糖水偏好实验系统2025-08-14 4504
-
【FPGA参赛作品】HDUSec-网络行为分析监控系统2012-06-01 3581
-
便携式步态分析MSGA与常规步态分析的区别在哪里?2017-10-11 4835
-
自动步态识别系统如何实现?2019-09-24 3520
-
基于STM32的踝关节步态采集处理系统设计2021-01-07 2411
-
介绍TROT步态原理2021-08-09 2200
-
多行为模式高频切换下尺度指纹步态算法_王仕亮2017-01-08 499
-
基于联合多特征字典稀疏表示的步态识别算法2017-11-30 704
-
根据走路方式及步态的生物识别验证系统 或将取代指纹识别和虹膜扫描2018-06-06 2142
-
大小鼠睡眠剥夺仪功能介绍2022-05-11 695
-
大小鼠饮食饮水监测系统2022-05-16 846
-
大小鼠睡眠剥夺仪的详细流程说明2022-06-09 1729
-
MGT-PR大小鼠步态行为分析系统2022-12-07 869
-
DB-MGT型大小鼠步态实时检测分析处理系统2023-03-23 1702
-
简仪高性能平台在小鼠脑电波实验中的应用2024-08-02 1389
全部0条评论

快来发表一下你的评论吧 !
