

FMT下一代高级开源自驾仪控制系统解析
军用/航空电子
描述
《FMT下一代开源自驾仪》:“Firmament意为苍穹,希望无人机未来可以自由翱翔于广阔天空。仰望苍穹,也表达了对于未知的探索和科技的敬畏。”

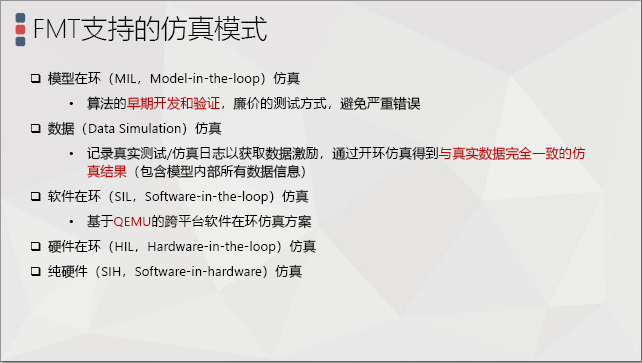
HIL仿真:

基于QEMU的SIL仿真+航点飞行: Firmament (FMT) 是一款基于模型设计 (Model Based Design, MBD) 的开源自驾仪,可被用来快速构建无人机,车,船,机器人等的无人控制系统。基于模型设计已经被广泛应用于汽车制造、航空航天等行业,当前采用基于模型设计模式开发的飞控系统凤毛麟角,而 FMT就是为此而诞生。FMT结合当前最先进的基于模型设计和3D仿真技术,致力于打造下一代的开源自驾仪系统。 FMT 项目主要由三部分构成:
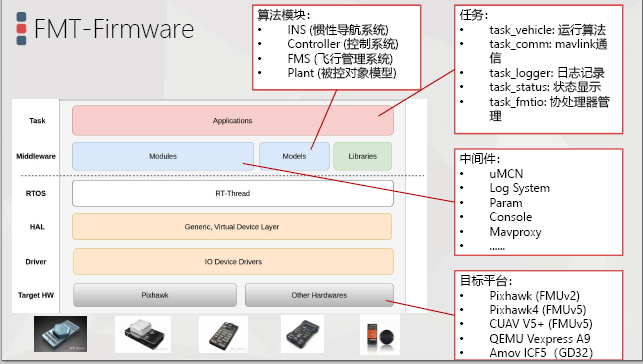
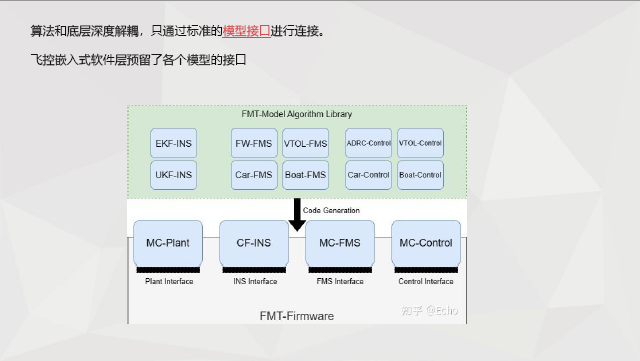
FMT-FW: 飞控嵌入式软件框架。包含飞控的核心软件,驱动以及功能模块。
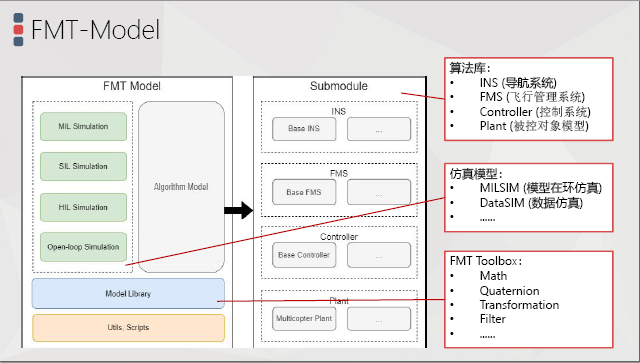
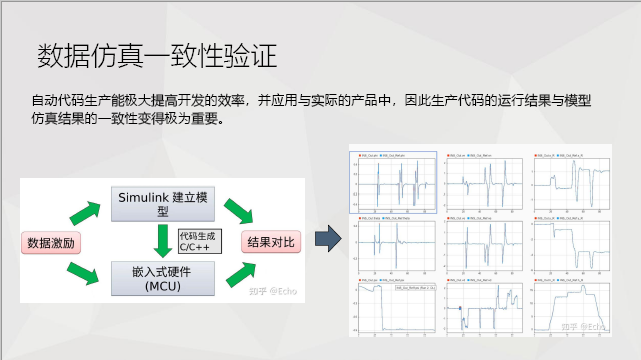
FMT-Model: 飞控算法模型框架。包含了基于 Matlab/Simulink 实现的算法模型,如导航,控制,状态机,被控对象模型等。算法模型通过自动代码生成可以合入到 FMT-FW中,从而构成完整的飞控系统软件。
FMT-Sim(开发中): 基于3D引擎实现的模拟仿真环境,提供逼真的渲染效果和丰富的仿真场景。
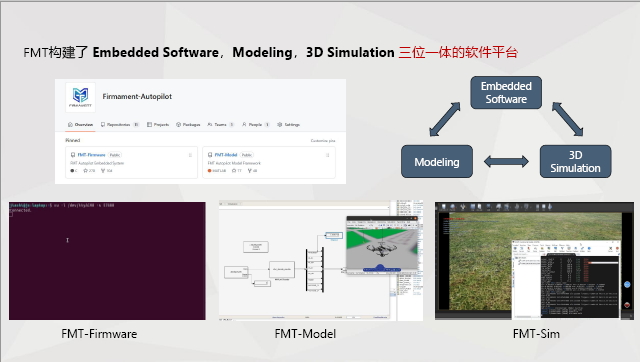
区别于其它的开源飞控,FMT构建了从嵌入式软件,建模与仿真于一体的软件开发平台。
ICF5是AMOVLAB和FMT团队匠心打造的一款专业级、高性能开源自驾仪硬件。它搭载了最新的FMT稳定版固件,可用于无人机,无人车,无人船和机器人等应用领域。FMT作为国内首个基于模型开发的国产开源飞控系统,与目前主流的APM/PX4相比,FMT使用图形化编程自动生成代码,开发效率可提升100%-200%。
ICF5作为FMT的首个自研飞控硬件,其系统和芯片均实现了纯国产。ICF5具有体积小,重量轻(重量仅39.3g)、丰富接口,支持图形化编程、支持多种仿真、支持多旋翼和固定翼的多种控制模式(包括支持室内室外定点、定高、自稳飞行控制、一键起飞、返航、降落、航点任务模式等)。相比于其它同类产品,ICF5在尺寸和功能上都具备很大优势。

PIX4/Pixhawk开源飞控似乎已经登峰造极,那么,下一代开源自驾仪会是什么样子呢?
编辑:黄飞
-
下一代定位与导航系统2012-08-18 2752
-
基于CompactRIO和LabVIEW的下一代机器人控制系统设计2019-05-15 1329
-
为什么说射频前端的一体化设计决定下一代移动设备?2019-08-01 3178
-
下一代SONET SDH设备2019-09-05 2676
-
单片光学实现下一代设计2019-09-20 3633
-
下一代测试系统:用LXI拓展视野2019-09-26 1910
-
下一代测试系统:用LXI推进愿景2019-10-09 2508
-
下一代超快I-V测试系统关键的技术挑战有哪些?2021-04-15 2217
-
如何利用低成本FPGA设计下一代游戏控制台?2021-04-30 1547
-
下一代网络概述2009-06-22 926
-
用CompactRIO和LabVIEW开发下一代机器人控制系2010-01-21 1037
-
FIRST与NI共同开发下一代机器人控制系统2010-01-23 1083
-
UltraScale如何支持下一代Ultra系统2019-01-08 3344
-
基于RT-Thread的开源自驾仪FMT正式版v1.0.0即将发布!2023-08-25 2439
-
下一代高功能新一代AI加速器(DRP-AI3):10x在高级AI系统高级AI中更快的嵌入处理2024-08-15 887
全部0条评论

快来发表一下你的评论吧 !
