

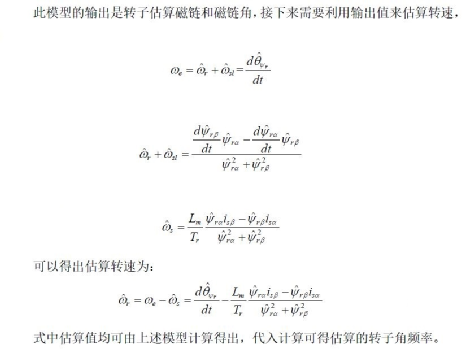
异步电机速度估计-混合模型磁链观测器法
电子说
1.4w人已加入
描述
导读:本期文章主要介绍异步电机速度估计的方法-混合模型磁链观测器法。对该方法的原理进行简单介绍和进行仿真验证。
一、引言
异步电机矢量控制是实现高性能调速的基础,利用传感器可获取电机转速和磁链角度位置信息,但传感器一般成本较高,且测量精度受环境影响,数值可靠性不高,因此IM 无位置传感器技术成为研究热点,此技术的算法核心是速度估算和磁链观测。一般操作流程是,在调试良好的IM 双闭环基础上,加入无速度控制算法进行开环仿真,验证算法合格性,速度估算和磁链观测正常后进行闭环控制,最后调试系统参数完成闭环仿真。
二、原理介绍
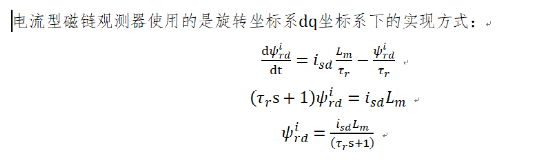
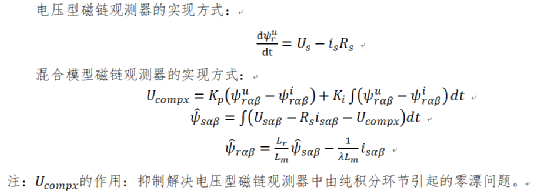
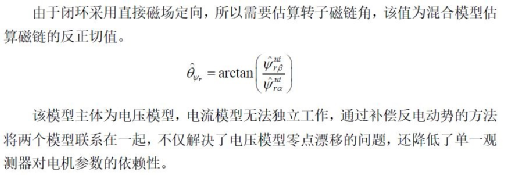
分别采用电压模型和电流模型的异步电机直接磁场定向控制在低速和高速时估计的转子磁链精度不高.在这基础上研究电压电流混合模型的闭环转子磁链观测器,使其在低速时采用电流模型,在高速时采用电压模型,两者能平滑过渡.根据磁链观测器结构,采用开环转速估计器,并做相应的抗噪声处理,使它结构简单,能满足动态和稳态要求.
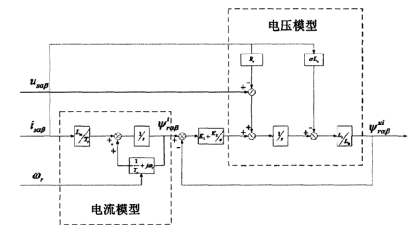
图1 混合模型磁链观测器控制框图
三、模型搭建及仿真分析
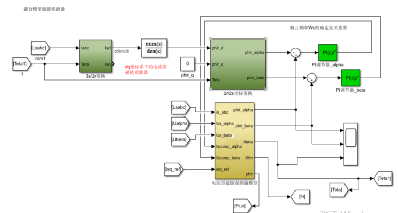
图2速度估计模块(混合模型磁链观测器法)
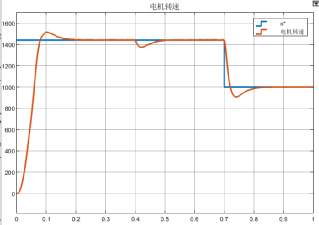
图3速度估计跟踪波形变化情况
从图3可以发现,速度估计的波形在突加载和速度变化的时候都能很好的跟踪上给定值,证明该估计方法的可行性和有效性。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
显著改善异步电机动态性能的磁链观测方法2025-07-15 396
-
两种感应电机磁链观测器的参数敏感性研究2025-06-09 365
-
基于全阶模型磁链观测器的异步电机矢量控制2023-11-09 3322
-
异步电机的改进型电压模型磁链观测器介绍2023-08-19 3570
-
基于电流型磁链观测器的异步电机矢量控制学习2023-03-30 946
-
异步电机控制笔记2023-03-29 1200
-
基于电压型磁链观测器的异步电机矢量控制学习2023-01-29 2947
-
异步电机混合模型转子磁链观测器学习2022-11-21 3125
-
全阶模型磁链观测器学习2022-11-08 7236
-
磁链观测器在异步电机矢量控制中的应用2022-09-06 3703
-
异步电机无感控制中,观测器在观测磁链时需要用到转速信息,而在速度估计时有需要用到磁链的信息,这样不矛盾吗?2019-05-21 3934
-
异步电机全阶磁链观测器反馈矩阵设计_邓歆2017-01-08 929
-
异步电机的无速度传感矢量控制设计2016-01-21 4926
-
新型自适应速度观测器在异步电机直接转矩控制系统中的应用2009-07-06 716
全部0条评论

快来发表一下你的评论吧 !
