

KUAK机器人常用系统变量介绍
描述
带有机器人中断数据的结构
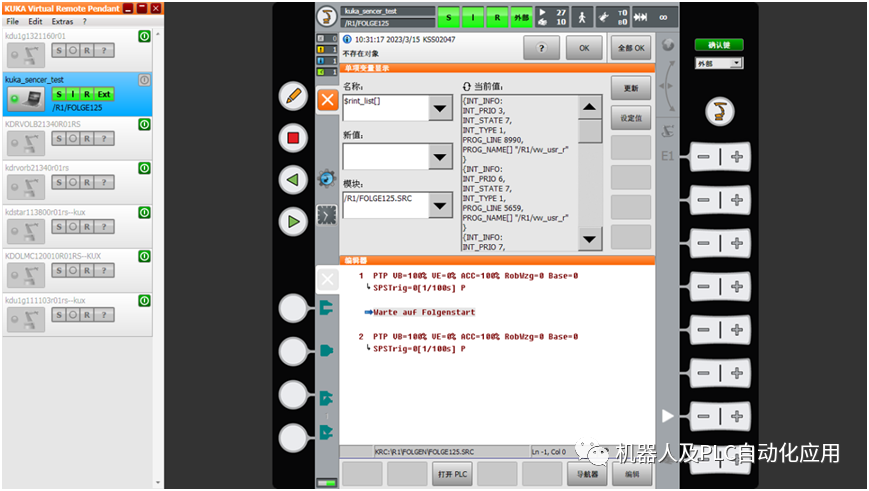
这些数据可以通过变量校正功能或通过主菜单中的诊断功能显示。
在robot和submit程序中,最多可以同时声明32个中断,同时最多可以激活16个中断。
有关中断编程的更多信息,请参阅系统集成商的操作和编程说明。
$RINT_LIST[ Index ]={INT_PRIO Priority,INT_STATE State,INT_TYPE Type,PROG_LINE Line ,PROG_NAME[] "Name"}
| Index |
类型:INT 中断的索引 1 … 32 |
| INT_PRIO |
类型:INT 中断的优先级 1, 2, 4 … 39 81 … 128 |
| INT_STATE |
中断状态的位阵列 Bit 0=1:宣布并激活中断。 Bit 1=1:中断被激活并启用。 Bit 2=1:全局声明中断。 |
| INT_TYPE |
类型:INT 中断类型 0:标准中断 1:由于紧急停止而中断($EMSTOP) 2:中断快速测量输入的激活($MEAS_PULSE) 3:由于错误停止而中断($STOPMESS) 4:由于触发而中断(子程序调用) |
| PROG_LINE |
类型:INT 宣布中断的机器人程序的行号 |
| PROG_NAME |
类型:CHAR 宣布中断的机器人程序的目录和名称:最多32个字符 |
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
简易机器人DIY——常用工具篇2015-03-06 11848
-
机器人常用材料2017-09-04 5535
-
先进机器人控制2017-09-19 4610
-
盘点机器人常用的三种电机2018-10-25 5385
-
零基础玩转工业机器人2018-10-29 5038
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
桁架机器人核心配件介绍2018-11-22 3471
-
机器人系统是什么?2019-09-10 3373
-
DF-1仿人机器人怎么样?2019-09-18 2414
-
拳头机器人视觉线跟踪系统介绍2020-08-06 1748
-
机器人工具箱中的常用函数介绍2021-09-15 2071
-
什么是机器人控制系统2021-10-11 3665
-
机器人Python仿真软件介绍2021-12-20 1873
-
PDF——工业机器人技术及应用2022-10-16 27520
-
读取机器人程序中的变量2023-05-29 2092
全部0条评论

快来发表一下你的评论吧 !
