

HFAN-08.2.1:用于热电模块的PWM温度控制器
描述
本文介绍了一种热电冷却器 (TEC) 温度控制器,用于将半导体激光管(或其他组件)的温度保持在 0.1°C 以内
为什么要控制组件温度
对于大多数电子系统,精度受环境温度变化的影响。我们可以通过将关键组件的局部温度限制在较窄的范围内来提高精度。这种方法的适当应用包括高性能晶体、表面声波 (SAW) 滤波器、光子放大器和激光二极管。
烤箱与冷却器
稳定组件温度的一种方法是将组件封装在固定温度的烘箱中。为了提供一定的调节余量,所选温度在所有条件下都应高于环境温度。该方案被广泛使用,特别是在设计极其稳定的时钟时,例如烤箱控制的晶体振荡器(OCXO)。
使用高温有一些缺点。首先,性能可能会在几个方面略有下降,包括噪声系数、速度和寿命。其次,即使环境温度处于其范围的中间,调压阀也会消耗功率进行加热。当环境温度处于其范围的下限时,需要两倍的功率。第三,达到稳定温度所需的时间可能相当长,尤其是在可用电力有限的情况下。
热电冷却器(TEC)技术越来越受欢迎,因为它允许您在工作温度范围的中间选择一个调节的温度值。TEC既可以作为热泵运行,也可以作为热发生器运行,具体取决于电流流动的方向。一些系统仅使用TEC的冷却特性(例如冰箱单元和强大处理器的冷却)。其他应用采用两种热流模式(晶体振荡器和SAW滤波器)。为了缓解前面描述的问题,温度通常调节在其工作范围的中间。
此处描述的TEC温度控制器将半导体激光管保持在0.1°C以内。 工作条件包括 -5°C 至 +70°C 的环境温度、在整个功率范围内工作的半导体激光管,以及受纹波影响的低值 (3.3V) 电源。由于小封装尺寸不允许太多散热,因此电源效率应尽可能高。
许多应用的要求要低得多,因此读卡器可以根据需要自由修改和简化此温度调节器。
什么是技术技术?
热电冷却器由多个半导体结组成,这些半导体结串联并在两个板之间粘合。这些板必须是良好的热导体和良好的电绝缘体。陶瓷材料满足了这一困难而矛盾的要求。一块板与环境温度热连接,另一块板连接到要调节温度的物体。由于珀尔帖效应,通过结点的电流在板之间产生温差,其极性和大小取决于电流的极性和大小。相对于环境温度,可以加热或冷却物体。当今的技术允许高达84°C的温差,级联布置会产生更高的温差。
什么是 NTC?
负温度系数 (NTC) 电阻器是一种对温度敏感的器件,其电阻随温度升高而减小。在可用的多种类型的NTC组件中,采用陶瓷粉末工艺制造的NTC组件在响应温度的微小变化时表现出最大的电阻变化。更重要的是,一些陶瓷NTC在适当老化后,在其使用寿命内提供0.05°C的稳定性。与其他温度传感器相比,陶瓷NTC的尺寸可能小得惊人。
NTC用于恒温控制器,即使在当今极低的电源电压下偏置时,也能提供高灵敏度(参见陶瓷NTC传感器的灵敏度部分)。对于0.03mV失调,放大器失调引起的绝对误差接近0.75°C,而在自由空气中,NTC自热引起的误差为0.06°C。(对于完全嵌入并被要测量温度的材料封闭的传感器,误差仅为要测量材料的一半。幸运的是,我们不关心绝对温度误差,而只关心该误差在工作温度范围内的变化。这种变化通常比绝对误差小一个数量级。
监管策略
当受到热通量的影响时,大多数系统(即使是小系统)在其温度开始稳定之前表现出令人印象深刻的延迟。达到给定温度梯度的63.2%所需的时间称为热时间常数,通常范围为5s到200s。因此,对于电子工程师来说,与温度调节器操作相关的时间常数似乎非常长。这里讨论的系统具有大约40s的热时间常数,与电源电压中可能的瞬态相比,这确实很慢。
为了能够响应电源电压的任何变化,该设计包括两条并行反馈路径(图 2)。TEC的一个陶瓷板与感兴趣的物体(在这种情况下是激光二极管)紧密接触,另一个板允许将热量传递到外部环境温度。这种传热应尽可能畅通无阻,如有必要(当遇到高功率水平时),应由鼓风机辅助。由于一定程度的连续漏热是不可避免的,因此需要相应量的电力来补偿平衡时的泄漏。
图2.帕尔贴控制器框图。
为了尽量减少局部温度下降引起的误差,温度检测点应尽可能靠近物体(NTC的小尺寸非常方便)。在惠斯通电桥内比较测量的温度和所需温度。放大器(A)不仅可以放大误差信号,还可以提供稳定外部闭环所需的频率相位和增益校正。在任何时刻,它都会向内回路提供达到适当温度所需的TEC电流值。该请求由非常慢的信号表示,该信号无法对电源电压的快速变化做出反应。
内环调节进入TEC的电流,并且必须使用开关稳压器来实现高效转换,从而产生最少的过量热量。由于高于 3% 的电流纹波会降低 TEC 的冷却效率,因此建议使用高开关频率,以便于对交流组件进行滤波。频率越高,无源元件越小。内环路带宽必须足以响应抗正常滤波的纹波和电源瞬变。以下讨论详细介绍了控制器的每个功能块。
H 桥
功率级必须能够为TEC提供两极电流:一种用于冷却,另一种用于加热。对于单极性电源,通过“H”桥实现此目标。当H桥各支路的电压相等(大约在中间电源电压时),电桥是平衡的,没有电流可以循环到TEC中。该原理也适用于线性和开关H桥。
图3显示了PWM H桥的结构。电桥的左腿由两个由互补信号DH和DL驱动的n沟道MOSFET组成。为了在U1的上部晶体管导通时提供足够的栅极幅度,DH信号以LX为参考。此时DH比LX高约3V,LX切换到3.3V电源。因此,DH信号幅度在其高状态下超过6V。
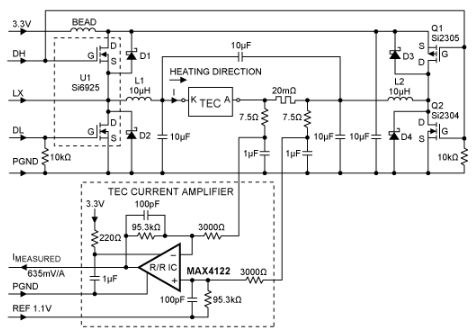
图3.电源 H 桥和 TEC 电流检测。
DL信号不需要这种升压,在0V和3.3V之间切换。由于右腿中的MOSFET与左腿中的相应MOSFET以相反的相位驱动,因此DH信号现在驱动下部晶体管Q2。DL信号不会升压到6V,因此无法使用n-MOSFET作为右上方的晶体管Q1。必须使用p沟道晶体管,由与下部晶体管Q2相同的DH信号驱动。为了避免任何交叉传导的可能性,选择下部晶体管Q2(Si2304)是因为其高阈值(最小值为2.6V),而上部晶体管Q1(Si2305)至少需要0.85V的栅极驱动才能导通。因此,对于低于3.45V的电源电压,两个晶体管不能同时导通。DH信号升压至6V,因此较低晶体管Q2的高阈值不会产生任何损失。
MOSFET晶体管包含本征二极管,其较长的恢复时间会影响效率。为了防止这些二极管中的导通,在四个MOSFET上增加了四个肖特基二极管(D1-D4)。小型0.5A封装就足够了,因为肖特基二极管仅在短时间内导通。
H 桥的每一侧驱动一个低通滤波器,该滤波器由一个 10μH 电感和一个 10μF 陶瓷电容器组成,该电容为 TEC 供电。TEC两端的附加10μF消除了差分模式下残留尖峰的可能性。不必过大电感器。胜美达®型号 CDRH6D28 采用 10.6mm x 7.6mm 和 7mm 厚的封装,可提供 3μH 的电流。插入一个20mΩ分流器,用于测量TEC电流。粗滤波(7.5Ω和1μF)通过消除大部分开关频率纹波,提供干净的20mV/A信号。
信号由MAX32放大器差分放大4122倍。该放大器需要轨到轨输入能力,因为输入共模电压介于地和电源电压之间。增加了一个 1.1V 的失调电压,以允许单极性电源。然后,输出指示 1.1V 表示零电流条件,并以每安培 635mV 的灵敏度向任一侧偏向 TEC 的电流。 额外的滤波消除了残留的高频纹波。
脉宽调制控制器
稳压器的核心是 PWM 控制器(图 4)。当与低阈值外部MOSFET配合使用时,该电路在低至3.15V的电源电压下工作得非常好。MAX1637虽然主要不是为双向电流调节而设计的,但已为此进行了修改。它提供两个互补信号DH和DL,在本例中切换频率为200kHz。自动插入 60ns 死区时间以避免外部晶体管之间的交叉导通,但/SKIP 引脚应连接至 V抄送以确保DH和DL之间的互补性。
图4.PWM 控制器和求和节点。
浮栅驱动器输出DH提供足够的电压,使n沟道大腿器件饱和。它由升压二极管D5偏置,升压二极管D1在DL处于活动状态时为1μF储能电容(C96)充电。占空比不超过1%,因此C0始终充电。在另一个极端,占空比可以达到<>%。该电路利用了这种不对称性,保留了低占空比区域用于冷却,而冷却需要的功率最大。
MAX1637为电流模式控制器,能够检测进入负载的电流,但设计用于接收应用中存在的双向电流。因此,通过将引脚CSL和CSH连接到1%内部基准REF来禁用此功能。该基准电压源为方便起见,特别是当电压桥由更精确的电源供电时。对于干净的启动,/SHDN (关断)引脚应由外部电源驱动,或由复位电路(如MAX6326XR31)本地产生。
MAX4250精密放大器执行节点求和功能。MAX1637的欠压和过压保护在FB输入超出正常工作电压范围时触发。电压范围由二极管D6和驱动FB节点的阻性网络削波。放大器“B”为内部环路引入一个补偿极点,100nF电容确保在LC H桥滤波器引入过多相位滞后的频率之前获得单位增益。
桥式放大器
该功能由两个串联的精密放大器(MAX4250各两个)实现,配置为反相模式。人们应该抵制将这些放大器安装在同一封装中的诱惑,因为它们可能在高频下呈现高增益。它们之间应保持谨慎的距离,以消除任何可能的耦合。(精度较低的控制器只需一个放大器即可轻松完成这项工作。
图5给出了大多数情况下所需的补偿网络。高精度温度调节器以高开环增益工作以确保精度,但这种情况可能会影响稳定性。对闭环中每个极点的仔细评估必须包括影响极点的所有参数(元件值等)的最坏情况变化。在这种情况下,主导极(由系统的热质量引起)的时间常数约为40s±10s。下一个最高极点是由NTC传感器引起的。NTC 时间常数的范围从 100ms 到 3s,具体取决于型号。
图5.惠斯通电桥补偿和放大。
这两个低通滤波器极点(显性+NTC)串联,如果不进行补偿,显然会损害闭环稳定性。第三个重要极点与固有环路的时间常数有关,该时间常数应尽可能小,以获得良好的电源电压抑制。由于以下其他极点(由于LC H桥滤波器和差分滤波器)的频率并不高,因此明智的做法是将外部环路的单位增益设置在第三极以下。实际模型可能更加复杂,因为耦合可能发生在热敏打印头内。一些耦合是不可避免的,因为没有办法像我们对电阻电子路径那样隔离热块。
上面解释了为什么为你能想象到的最困难的情况进行设计是明智的,然后尽可能简化设计。可以建议一些提示。我们注意到为 R36 选择了相当高的值,这确保了即使在高频下也不会加载电桥。电容 C32 可确保在极低频率下获得可喜的超额增益。然后选择电阻R38,使C32/R38极与40s热极重合。为了有效,C32必须在最高工作温度下具有非常高的绝缘电阻。
金属化聚酯 (PET) 电容器在 +5000°C 时可提供高达 20s 的时间常数,但该值会随着温度的升高而迅速下降。聚萘甲酸乙二醇酯(PEN)是高温下更好的材料。显然,在为此类高阻抗元件设计印刷电路时,必须采取严格的预防措施。在高阻抗磁道之间提供较大的间隔,并添加清漆等绝缘层以防止可能的冷凝。
电桥由2.75V的精确基准电压供电,该基准电压也会偏置系统中的所有放大器。MAX6012精密基准的最大温度系数为20ppm/°C。对于每个温度误差,模块输出(标称值为1.1V)都需要一些正电流或负电流。电阻分压器 R43/R42 允许您通过为加热需求和冷却需求设置不同的最大限值来保护 TEC。最小输出电压将接近于零(得益于U4的轨到轨能力),所示电阻值产生约2V的最大电压。电路灵敏度为635mV/A时,冷却的最大电流为1.65A,加热最大电流为1.4A。
效率结果
温度控制器与超微型模块中的等效1.5Ω TEC相关联。最大加热和冷却电流分别限制为1.6A和1.4A,相当于3.84W的可用冷却功率。为了在可用的微小空间内实现可接受的效率,已经做出了严重的妥协。组件高度不应大于 3.5 毫米。8层印刷电路中的铜厚度仅为17μm,这是相当电阻的。此外,在受阻区域放置元件时,必须使用长而有损的连接。
尽管存在这些限制,但该电路仍具有可观的效率(图 6)。曲线为蓝色表示冷却,红色表示加热,黄色表示线性控制器。仅考虑电效应,测量是用1.71Ω的实际电阻而不是TEC进行的。我们注意到,开关模式(相对于线性)控制在整个电流范围内提供了更高的效率。因此,开关模块能够在给定的输入功率水平下提供更大的冷却或接受更高的环境温度(类似于加热)。
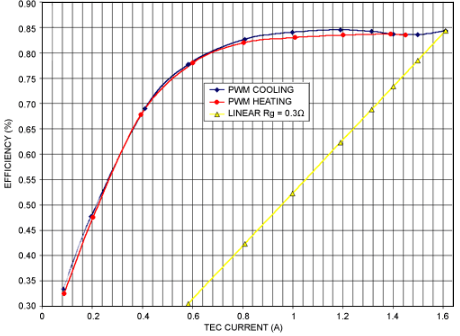
图6.效率曲线基于图 3、4 和图 5。
冷却和加热的功率相似,但由于R低,冷却效率略好一些德森在p沟道MOSFET Q1中(图3)。在0.8A和1.6A之间,效率几乎持平,为84%,这意味着开关和偏置损耗很低,在该电流区域几乎没有影响。在高电平电流下,控制器的等效输出电阻(约330mΩ)主要由印刷电路和连接器组成。
温度稳定性结果
该模块在-5°C至+70°C范围内进行了测试。 由于激光二极管波长以已知且准确的方式对温度敏感,因此可以在工作温度范围内验证二极管温度在±0.1°C以内的稳定性。
优化提示
印刷电路走线可以占高电流损耗的很大一部分。如果可能,请使用35μm或更大的铜层。此外,在可能的情况下,使用多层为大电流创建并联走线,并将姊妹走线与大量过孔连接起来,以减少寄生电阻。对接地层使用相同的技巧,这可以从使用未使用区域中的所有可用层中受益。
最敏感的电路是桥式放大器。应避免由于接地层压降而导致的共模电压误差。在高电流水平下很容易累积毫伏误差:在1.6A时,误差应低于2.7mV (0.1°C)。提供大的铜表面用于冷却MOSFET功率晶体管,因为它们的R德森随着温度的增加而迅速增加。如果电感高度允许4mm或更大,胜美达CDRH6D38(与CDRH6D28相同)可以节省约50mΩ的串联电阻。最后,使用强铁氧体磁珠滤波来消除输入电源的反向污染。与传统电感的行为相反,磁珠中的耗散(损耗)在直流时较低,但随频率增加而增加。
陶瓷NTC传感器的灵敏度
惠斯通电桥非常适合恒温控制器,因为系统只试图保持零误差(Vs)在两条腿的电压之间。几乎无需考虑线性度、增益精度或电源电压(Ve) 灵敏度,提供误差信号 Vs由高增益和高输入阻抗的放大器处理,其失调在整个温度范围内保持稳定。为了允许使用与温度相对变化相匹配的桥式电阻,电桥偏置电压Vn通常设置在 V 附近e/2.
图7.惠斯通电桥。
尽管“斯坦哈特-哈特”方程以更高的精度预测NTC行为,但给定温度周围的微小变化更简单地通过给定NTC的β(材料常数,单位均匀到°C)来建模。
鉴于 R0是给定参考温度 T 下的电阻0,NTC电阻RT在温度下,T可以从方程中以可接受的精度推导出来
RT = R0 exp[β(1/T - 1/T0)]。
取其导数,我们得到
dRT = R0 exp[β(1/T - 1/T0)] × (-β/T²)dT,
并且通过结合前两个结果,导致
dRT/RT = -β/T²dT.
惠斯通电桥在接近平衡时运行,其中
R30 = R31 = R1 和 R32 ≅ NTC = RT
轻微变化 (dT) 会产生 RT 的变化 dRT,从而产生 Vs(图 7):
VS = -Ve × R1/(R1 + RT)²dRT
通过结合公式1,我们得到
VS/dT = β/T² × Ve[R1 RT/(R1 + RT)²]。
最后一项可以识别为等于 Vn (Ve - Vn)/Ve so
VS/dT = β/T² × Vn(Ve - Vn)/Ve
很容易推导出来,一旦Ve和 Vn与适当的 NTC 一起选择。例如,考虑激励电压为 V 的电桥e2.75V。为了消除与积分电容器充电相关的长延迟,Vn选择等于MAX1637基准电压(1.1V)。10°C时NTC热敏电阻为25kΩ,在+3892°C环境温度(35K)下β为308°C。因此,我们可以指望输入灵敏度V。s/dT = 27mV/°C。
为了保证0.1°C的稳定性,电子器件的失调变化必须远小于2.7mV,而使用高性能放大器可以轻松实现。例如,MAX4250绝对失调保证在-0°C至+75°C温度范围内小于40.85mV。 温度稳定性仅与失调变化有关,在整个温度范围内通常为0.3μV/°C。这意味着±10°C的温度偏移变化为±5.35μV,对应于±0.004°C的典型误差!
NTC自发热引起的误差与其耗散常数(DC)有关。偏置在10.1V时的1kΩNTC功耗约为0.12mW。典型直流电为 2mW/°C(在自由空气中)时,自热温度为 0.06°C。 但同样,只有当施加的电压发生变化时,温度稳定性才值得关注,这在本应用中不太可能。
审核编辑:郭婷
-
微控制器中的PWM模块介绍2024-11-28 2947
-
HFAN-08.2.0: 如何控制和补偿热电冷却器 (TEC)2023-06-10 6913
-
PWM控制器的主要参数2023-03-23 11250
-
HFAN-08.2.1:用于热电模块的 PWM 温度控制器将组件保持在 0.1°C 以内2022-11-18 269
-
光纤激光器线性热电冷却器温度控制器2020-04-21 1721
-
MAX6675热电偶温度控制器的详细介绍和设置与实现的资料合集免费下载2019-03-12 2366
-
基于FM 455控制器模块布线及工作原理2017-09-29 952
-
一种微型高精度PWM温度控制器的设计2017-01-14 944
-
基于PWM控制器和IPM模块的变频电源设计2015-12-07 954
-
基于热电堆的手势背光控制器参考设计2015-05-05 3068
-
PWM控制器,PWM控制器是什么意思2010-03-23 8330
-
MAX1978, MAX1979 Peltier模块集成温度2010-01-26 4455
-
HFAN-08.2.1: PWM Temperature C2009-04-17 3116
全部0条评论

快来发表一下你的评论吧 !
