

汽车雷达与驾驶安全简析
汽车电子
描述
什么是汽车雷达
汽车雷达作为驾驶员辅助系统的核心传感器 (检测距离、速度),其中远距离雷达(LRR)是用来实现自动巡航(ACC),中距离雷达(MRR)用来实现侧向来车报警和车道变道辅助,近距离雷达(SRR)则是用来实现停车辅助、障碍和行人检测。
汽车雷达在智能交通系统中通过无线电波探测车辆速度和距离,在雨雪等恶劣天气条件下也能稳定检测目标,通常装载在机动车前端和后端,用于实现自适应巡航控制(ACC)和车辆防撞告警等功能。它可以帮助驾驶员更好地感知和掌握车辆周围的情况,进而提升行车的安全性。
汽车雷达的作用
(1)提高驾驶的安全性。
(2)以声音或者更为直观地显示告知驾驶员周围障碍物的情况。
(3)解除驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野死角和视线模糊的缺陷。
雷达技术,致力提高驾驶安全性
汽车雷达与驾驶安全
目前,应用于汽车的雷达主要有三种:激光雷达、超声波雷达和毫米波雷达,是汽车安全驾驶的辅助手段之一,在汽车驾驶安全上发挥着重要作用。
举个例子吧,倒车是大家在生活中不可避免的事情,每次的倒车成功都少不了倒车雷达的功劳。倒车雷达帮了我们些什么呢?
它会以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员倒车时左右探视所引起的困扰,并帮助驾驶员扫除视野死角和视线模糊的缺陷,提高倒车安全性。
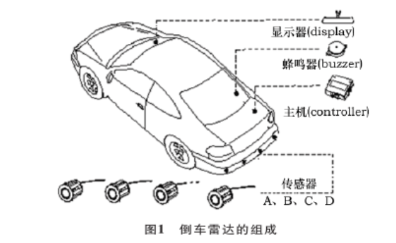
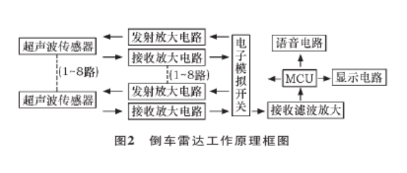
倒车雷达由超声波传感器(俗称探头)、控制器和显示器 (或蜂鸣器) 等部分组成,如图1所示,倒车雷达一般采用超声波测距原理,传感器在控制器的控制下发射超声波信号,当遇到障碍时,产生回波信号。传感器接收到回波信号后,经控制器进行数据处理,并判断出障碍物的位置,显示距离并发出其他警示信号,从而达到安全泊车的目的。图2是倒车雷达的工作原理图。
前段时间,北汽集团所属北汽研究总院首次激光雷达低速碰撞试验取得成功,为北汽高阶智能驾驶汽车安全验证提供技术保障。
激光雷达主要工作原理是向目标发射激光束(单线/多线),然后将反射信号与发射信号比较, 分析信号的折返时间(TOF)或频率差(多普勒频移),即可获得目标距离等相关参数,甚至可二次衍生出目标姿态、形状等信息,广泛用于自动驾驶、智慧城市等领域。
激光雷达为高阶智能驾驶汽车感知系统的重要组成部分,前部感知雷达安装点位于车辆保险杠中间和两侧,日常的碰撞、挤压可能会使激光雷达载体部件发生变形,导致测试精度降低,甚至直接破坏雷达本体,严重影响行车安全。结合用车场景,为验证激光雷达低速碰撞下的可靠性,北汽研究总院试验验证团队深入研究激光雷达系统低速碰撞试验方法,充分开展设计制造摆锤工装、配载测量、设定碰撞速度和位置标定等验证准备工作。碰撞时,整车布置了3个激光雷达、7个毫米波雷达和4个环视摄像头,全面感知识别周边环境、速度等信息。碰撞完成后,整车智能驾驶性能完好。
激光雷达低速碰撞试验取得成功,是验证产品设计开发质量的一小步,也是向着高安全性驾驶目标迈进的一大步。
审核编辑:刘清
-
汽车雷达回波发生器的技术原理和应用场景2024-11-15 4673
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4865
-
提高汽车安全性中雷达系统的应用2012-10-21 3121
-
无人驾驶电子与安全2017-02-22 4934
-
激光雷达在无人驾驶技术中的应用解析2017-10-18 4894
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 7036
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6962
-
汽车防撞雷达的专家做进一步解读特斯拉电动车的自动驾驶系统2018-09-03 4447
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3328
-
汽车雷达探头想要发展必须得解决哪些问题?2019-08-09 3515
-
汽车雷达:阵列天线设计步骤2020-06-15 4314
-
请问摄像头、雷达和LIDAR哪个更适合自动驾驶汽车?2020-11-23 5634
-
汽车雷达传感器的解决方案2022-11-07 1116
-
电动汽车用锂离子电池技术的国内外进展简析2009-11-10 1104
全部0条评论

快来发表一下你的评论吧 !
