

上位机控制机器人自动运行速度
机器人
554人已加入
描述
正文
1. WorkVisual连接
打开WorkVisual,进入编程与诊断,连接机器人,读取程序;
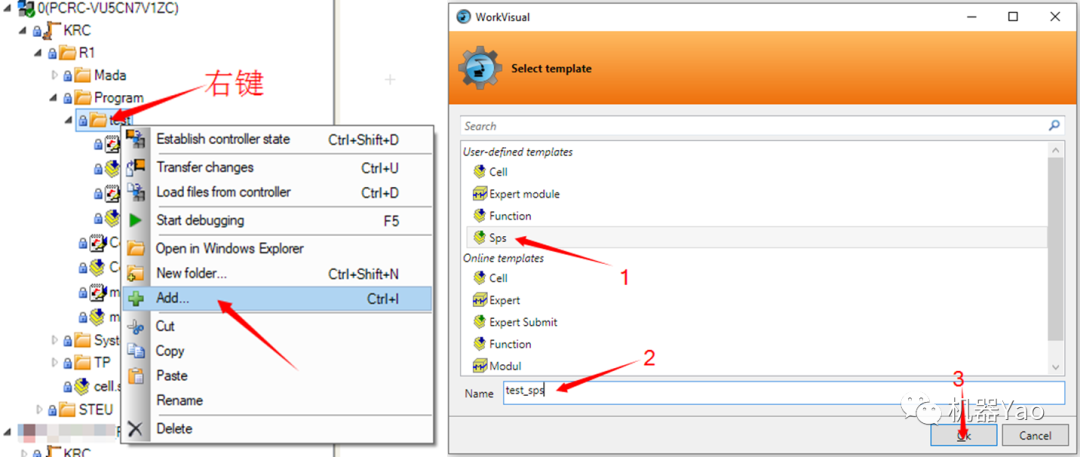
2. 新建后台程序
(1)右键对应文件夹,点击Add,新建Sps文件,输入名称(英文开头),点击OK;
3. 修改后台程序
(1)双击打开程序;
(2)在图示位置(声明)输入,语句需要修改IN[ ]和OUT[]中的内容:
SIGNAL OV_PRO **IN[4001] TO **IN[4008]
SIGNAL OV_PRO_Confirm **OUT[4001] TO **OUT[4008]
DECL INT ERR_OV_PRO
DECL BOOL OV_PRO_Switch

(2)在图示位置(初始化)输入:
ERR_OV_PRO = 0
OV_PRO_Switch = FALSE

(3)在图示位置(循环)输入:
程序解释:当PLC输入速度时,速度控制开关会打开,PLC可以调控机器人速度,且会通过OUT反馈速度;当PLC输入速度0时且速度控制开关打开时,速度控制开关会关闭,并将速度减少到0,速度反馈关闭;
IF (OV_PRO > 0) AND NOT OV_PRO_Switch THEN
OV_PRO_Switch = TRUE
MsgNotify("PLC began to control running speed", "test_sps")
ENDIF
IF (OV_PRO == 0) AND OV_PRO_Switch THEN
$OV_PRO = 0
OV_PRO_Switch = FALSE
MsgNotify("OV_PRO = 0, PLC stop speed control", "test_sps")
ENDIF
IF (NOT $T1) AND OV_PRO_Switch THEN
IF (OV_PRO > 100) THEN
IF ($OV_PRO <> 100) OR (OV_PRO <> ERR_OV_PRO) THEN
ERR_OV_PRO = OV_PRO
$OV_PRO = 100
MsgNotify("OV_PRO max = 100, PLC send OV_PRO = %1", "test_sps",ERR_OV_PRO)
ENDIF
ELSE
IF $OV_PRO <> OV_PRO THEN
$OV_PRO = OV_PRO
MsgNotify("OV_PRO = %1", "test_sps",OV_PRO)
ENDIF
ENDIF
OV_PRO_Confirm = $OV_PRO
ELSE
OV_PRO_Confirm = 0
ENDIF

4. 将改动传送到控制柜
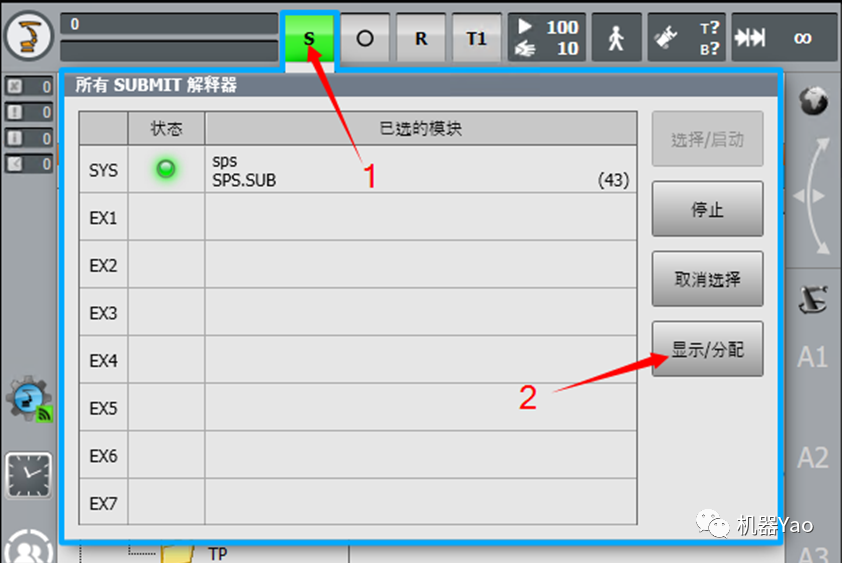
5. 设置后台程序启动
(1)登录管理员权限;
(2)点击S/显示分配;
(3)点击EX1/程序名/选择启动,打开后台程序;
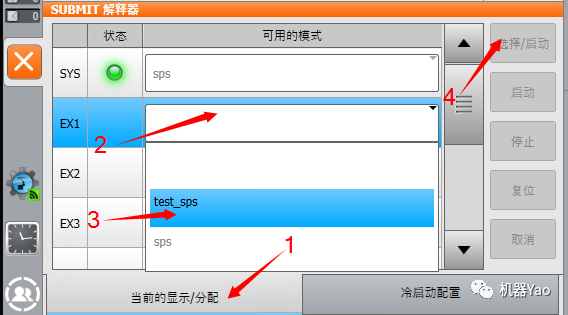
(4)点击冷启动配置/EX1/程序名,设置开机自动启动;

(5)关闭SUBMIT解释器配置;
(6)上位机发送 **IN[ ] TO IN[ ] 就可以通过二进制转换控制机器人自动运行时的速度,监控OUT[ ] TO **OUT[ ] 就可以获取机器人自动运行时的速度;
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人labview上位机程序2014-03-21 13472
-
一个巡逻机器人的设计2016-01-04 10480
-
自动接水机器人2016-03-25 5557
-
可视化机器人2016-07-31 4424
-
如何打造一款服务型机器人2017-08-11 5141
-
如何保障桁架机器人的安全2018-09-29 3161
-
ABB机器人维修保养指南2020-08-19 6037
-
智能救援机器人的功能和作用2020-11-30 5196
-
使用机器人全自动组装LeanMotor转子2021-06-28 2153
-
如何对机器人嵌入式控制平台进行仿真呢2021-12-20 1915
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2167
-
基于RS485的农业机器人与上位机可靠通信的实现2009-09-18 1146
-
桁架机器人的运行设置2018-11-05 1108
-
机器人如何与上位机进行通信协议2019-05-31 2027
-
EPSON机器人如何与视觉上位机实现TCP通信2022-10-10 2741
全部0条评论

快来发表一下你的评论吧 !
