

FPGA实现PID控制算法
电子说
描述
一. 简介
相信大家对于PID控制算法,都不感到陌生了,平衡车就是靠它平衡起来的,还有飞控的平衡算法也是它,以及FOC中的闭环控制中也是用的它,它不仅简单,而且易于理解。那么本篇文章将简要介绍一下算法的原理,然后带大家使用FPGA来实现(C语言实现过程特别简单)。
二. PID算法
PID取自比例、积分、微分三个英文字母的首字母。意味着算法由这三部分组成。
1. P 比例
运算过程为 期望值 减去 当前值 ,然后再乘上一个p系数,就得到了一个反馈值。比例的作用主要是为了让 期望值 与 当前值相等
2. I 积分
将误差值不断累加,然后再乘上一个I系数,就得到了一个反馈值。 积分的作用主要是为了消去静态误差,但当前值接近 期望值的时候,这个时候,比例的作用就非常小了,可能会接近于0,而且相邻两次的误差值也近似为0,D微分也起不了多大作用,假如这时候系统外部的阻力和PD反馈值抵消了,这个时候就需要不断的累加这个误差值来使当前值等于期望值
3. D 微分
当前的误差值 减去 上一次运算的误差值,然后再乘上一个d系数,就得到了一个反馈值。微分的作用主要为了减少系统的震荡,在系统变化的方向上,施加一个反方向的反馈,使系统朝这个方向的变化得到抑制
可以到,PID算法主要涉及到三种运算: 加法,减法和乘法。这三种运行在FPGA上也是很容易实现的。
三. FPGA实现
首先需要注意的是,PID的三个系数均为浮点数,为了便于实现,这里将浮点数扩大100倍,然后取整就可以了。然后将反馈的结果缩小100倍就可以了。
1. P 比例实现
实现代码如下,只需要两个时钟周期即可完成。这里通过左移来实现缩小100操作,实际上是缩小了102.倍,不太会影响结果。为了和 I 积分 和 D 微分 运算周期数相同,这里打了一拍操作。
//P -------------------------------------------------
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kp_fb <= 1'b0;
else if( pid_en == 1'b1)
Kp_fb <= ( desired_value - current_value ) * Kp;
else
Kp_fb <= Kp_fb;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kp_fb_reduce <= 'd0;
else if( cal_delay_0 == 1'b1)
Kp_fb_reduce <= (Kp_fb >>> 7) + (Kp_fb >>> 9); // /102.4
else
Kp_fb_reduce <= Kp_fb_reduce;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kp_fb_reduce_d0 <= 'd0;
else if( cal_delay_1 == 1'b1)
Kp_fb_reduce_d0 <= Kp_fb_reduce;
else
Kp_fb_reduce_d0 <= Kp_fb_reduce;
end
//--------------------------------------------------------------------
代码片段:可切换语言,无法单独设置文字格式
2. I 积分实现
实现代码如下,比P比例稍微辅助一点。这里考虑到了一个积分限幅的问题,如果积分值一直累加的话得,可能会导致系统稳定不下来,所以这里设置为3000。
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Ki_integral <= 'd0;
else if( pid_en == 1'b1)
if( Ki_integral > $signed('d3000) && ( desired_value - current_value ) > $signed('d0) )
Ki_integral <= Ki_integral;
else if( Ki_integral < $signed(-'d3000) && ( desired_value - current_value ) < $signed('d0) )
Ki_integral <= Ki_integral;
else
Ki_integral <= Ki_integral + ( desired_value - current_value );
else
Ki_integral <= Ki_integral;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0 )
Ki_fb <= 'd0;
else if( cal_delay_1 == 1'b1 )
Ki_fb <= Ki_integral * Ki;
else
Ki_fb <= Ki_fb;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0 )
Ki_fb_reduce <= 'd0;
else if( cal_delay_2 == 1'b1)
Ki_fb_reduce <= (Ki_fb >>> 7) + (Ki_fb >>> 9); // /102.4
else
Ki_fb_reduce <= Ki_fb_reduce;
end
//-------------------------------------------------------------------
代码片段:可切换语言,无法单独设置文字格式
3. D微分 实现
D 微分操作实现如下,按照公式来即可
//D ---------------------------
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kd_error <= 'd0;
else if( pid_en == 1'b1)
Kd_error <= ( desired_value - current_value );
else
Kd_error <= Kd_error;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kd_fb <= 'd0;
else if( cal_delay_0 == 1'b1)
Kd_fb <= (Kd_error - Kd_last_error) * Kd;
else
Kd_fb <= Kd_fb;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kd_last_error <= 'd0;
else if( cal_delay_0 == 1'b1)
Kd_last_error <= Kd_error;
else
Kd_last_error <= Kd_last_error;
end
always@(posedge clk or negedge rst_n)
begin
if( rst_n == 1'b0)
Kd_fb_reduce <= 'd0;
else if( cal_delay_1 == 1'b1)
Kd_fb_reduce <= (Kd_fb >>> 7) + (Kd_fb >>> 9); // /102.4
else
Kd_fb_reduce <= Kd_fb_reduce;
end
//--------------------------------
代码片段:可切换语言,无法单独设置文字格式
四. 仿真验证
测试代码如下,初始化当前值为500,然后根据期望值和PID输出的反馈值,来调节当前值。
always@(posedge clk or negedge rst_n) begin
if( rst_n == 1'b0)
current_value <= 'd500;
else if( pid_ack == 1'b1)
current_value <= current_value + out;
else
current_value <= current_value;
end
PID_Control PID_Control_i(
.clk ( clk),
.rst_n ( rst_n),
.pid_en ( 1'b1),
.pid_ack ( pid_ack),
.desired_value ( desired_value),
.current_value ( current_value),
.Kp ( 'd10),
.Ki ( 'd1),
.Kd ( 'd10),
.out ( out)
);
代码片段:可切换语言,无法单独设置文字格式
仿真波形如下
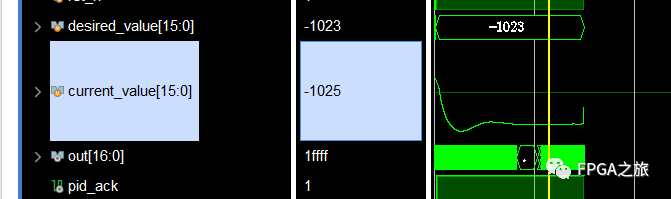
这个是设置了D为0的情况,可以看到系统的震荡

-
PID控制算法的C语言实现:PID算法原理2025-02-26 739
-
PID控制算法代码 PID控制算法的原理2023-07-20 4990
-
两种实现PID控制的算法的技巧2023-05-19 1587
-
PID控制算法的C语言实现2022-01-13 1778
-
PID算法的代码实现2021-08-17 1879
-
什么是PID控制算法?PID控制算法C语言是如何实现的?2021-06-29 2445
-
温度控制的PID算法及C程序实现2021-05-31 2171
-
基于FPGA的模糊PID控制器的设计实现2018-06-01 18554
-
PID控制算法控制算法2016-11-17 1129
-
PID控制算法的C语言实现(完整版)2016-11-05 1389
-
快速浮_定点PID控制器FPGA的研究与实现2016-05-11 736
-
FPGA中实现PID算法2014-12-03 29442
-
基于FPGA的模糊PID控制算法的研究及实现2013-03-18 9871
-
基于FPGA实现PID控制器的研究2009-09-15 843
全部0条评论

快来发表一下你的评论吧 !
