

剖析ROS编译教程
电子说
1.4w人已加入
描述
ROS的编译和安装还是稍微有点门槛的,这篇文章简单的记录一下。
ROS功能包的安装
https://github.com/TonyRobotics/RoboWare

一个合适的IDE,我看了一下是VSCode的魔改
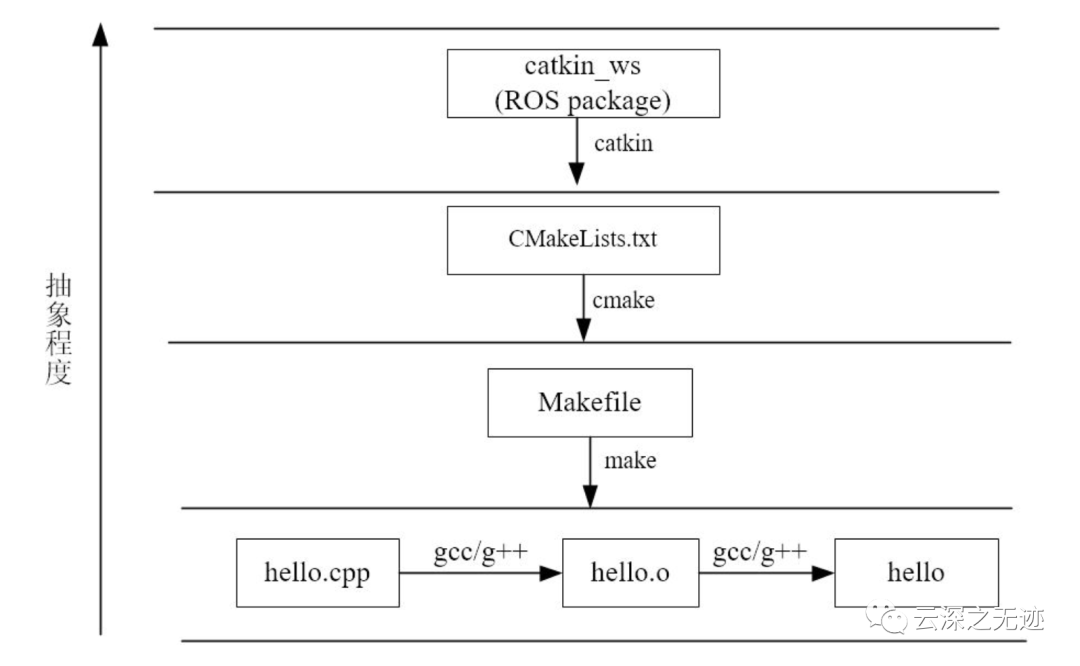
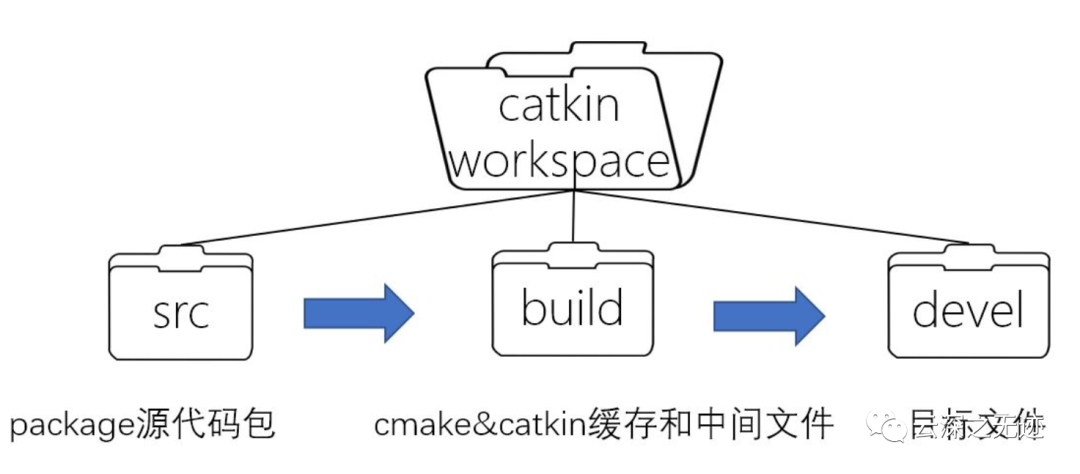
编译的框图
ROS对CMake进行了扩展,于是便有了Catkin编译系统。
Catkin是基于CMake的编译构建系统,具有以下特点:
- Catkin沿用了包管理的传统像
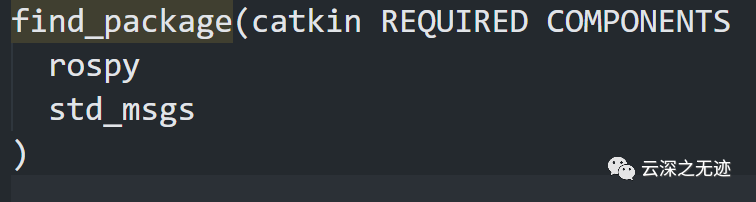
find_package()基础结构,pkg-config - 扩展了CMake,例如
- 软件包编译后无需安装就可使用
- 自动生成
find_package()代码,pkg-config文件 - 解决了多个软件包构建顺序问题
一个Catkin的软件包(package)必须要包括两个文件:
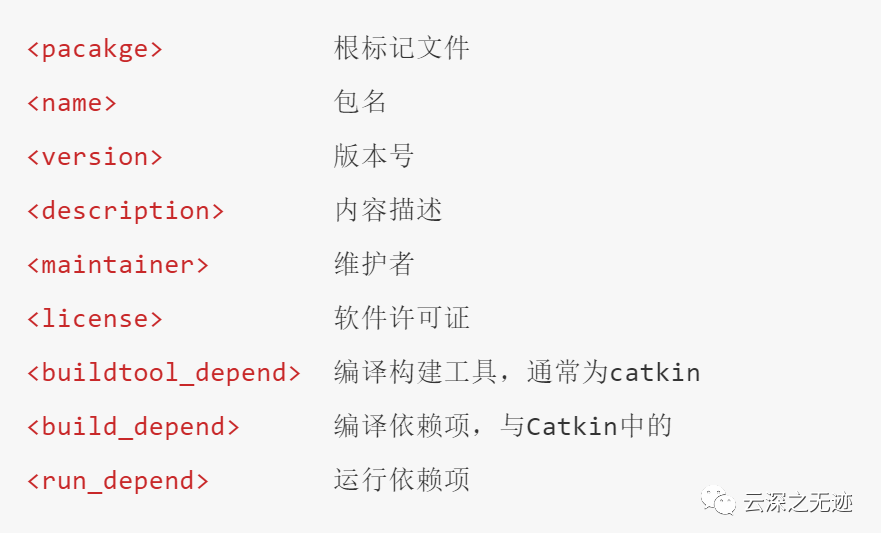
- package.xml: 包括了package的描述信息
- name, description, version, maintainer(s), license
- opt. authors, url's, dependencies, plugins, etc...
- CMakeLists.txt: 构建package所需的CMake文件
- 调用Catkin的函数/宏
- 解析
package.xml - 找到其他依赖的catkin软件包
- 将本软件包添加到环境变量
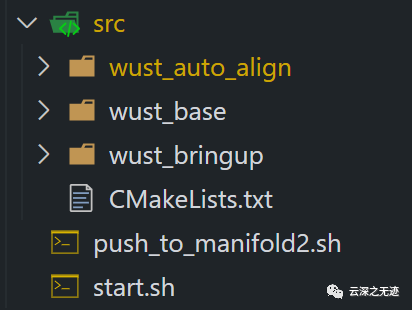
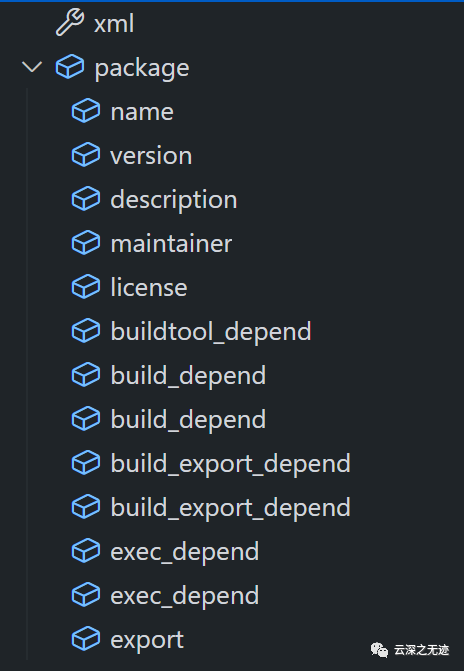
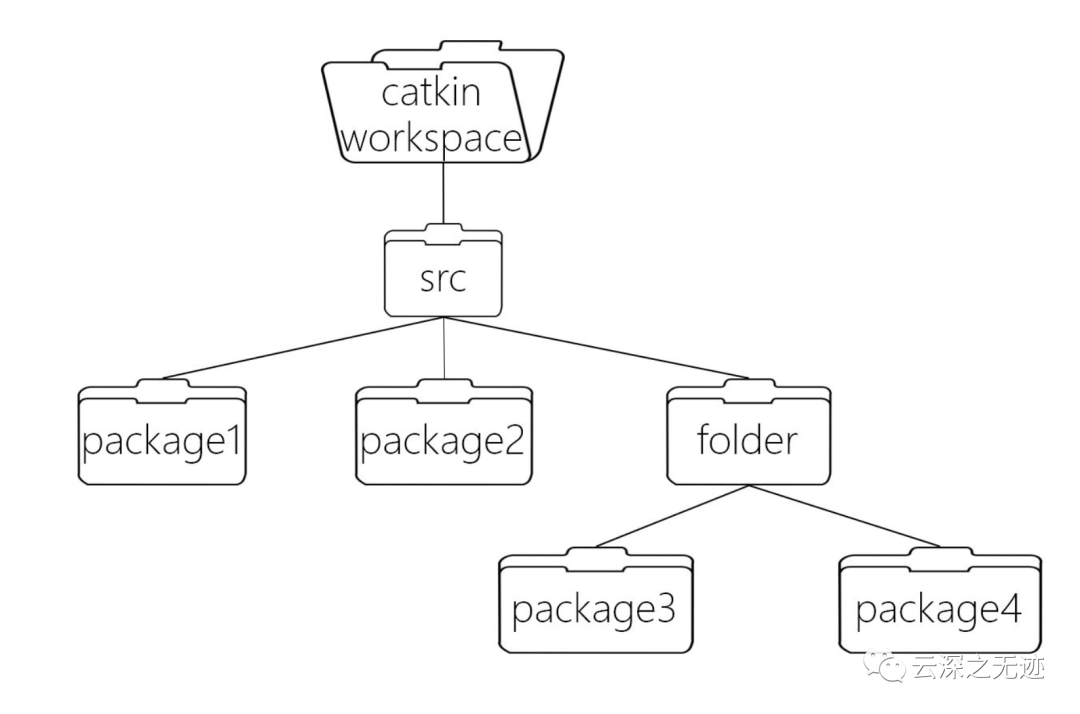
这个是我手边的一个典型的目录
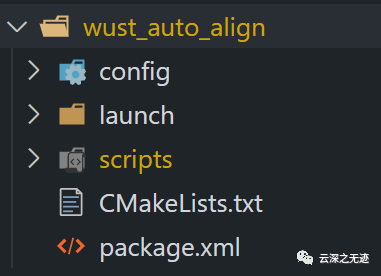
其中一个功能包的结构
catkin编译的工作流程如下:
- 首先在工作空间
catkin_ws/src/下递归的查找其中每一个ROS的package。 - package中会有
package.xml和CMakeLists.txt文件,Catkin(CMake)编译系统依据CMakeLists.txt文件,从而生成makefiles(放在catkin_ws/build/)。 - 然后
make刚刚生成的makefiles等文件,编译链接生成可执行文件(放在catkin_ws/devel)。
也就是说,Catkin就是将cmake与make指令做了一个封装从而完成整个编译过程的工具。catkin有比较突出的优点,主要是:
- 操作更加简单
- 一次配置,多次使用
- 跨依赖项目编译
xml文件是一些项目的基本信息,就是版本号,描述什么的
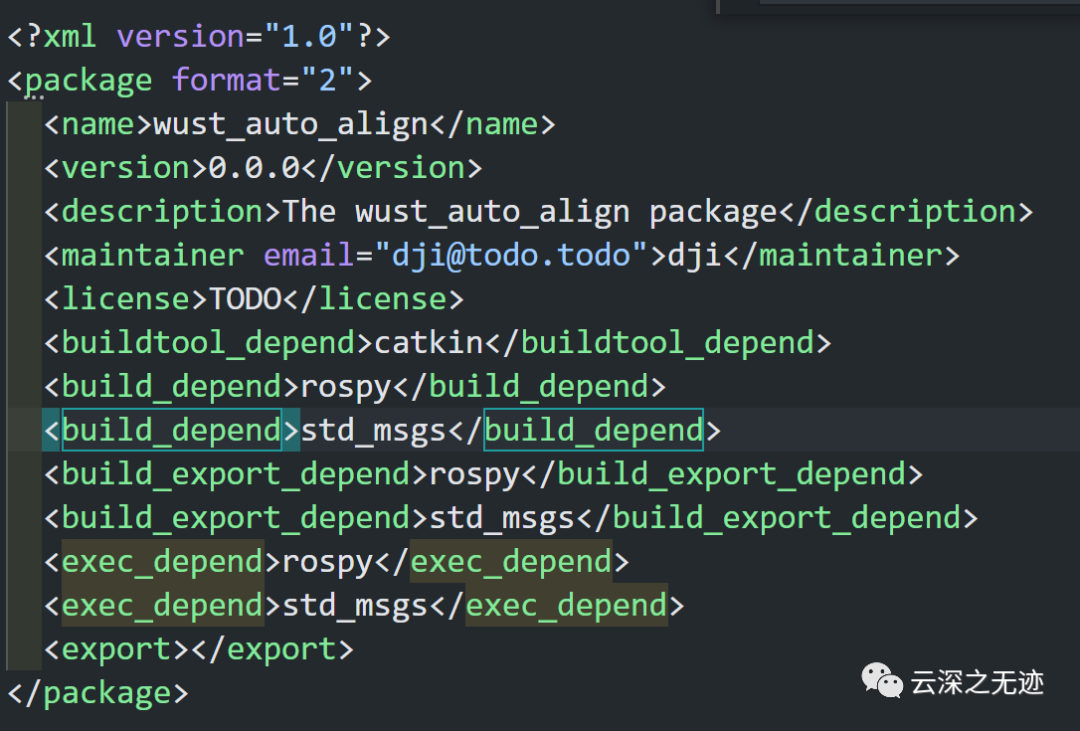
就是这样
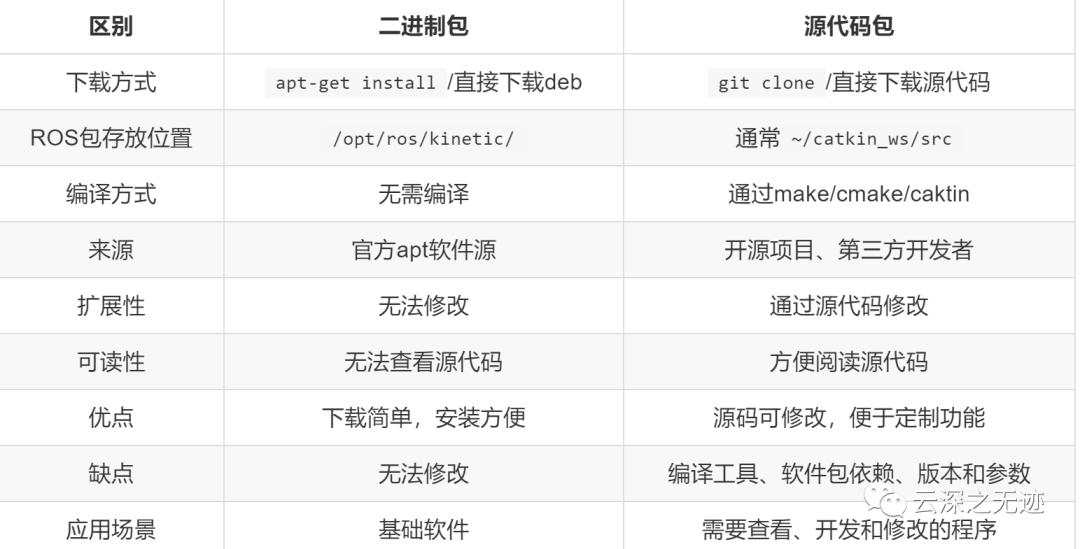
比对的看
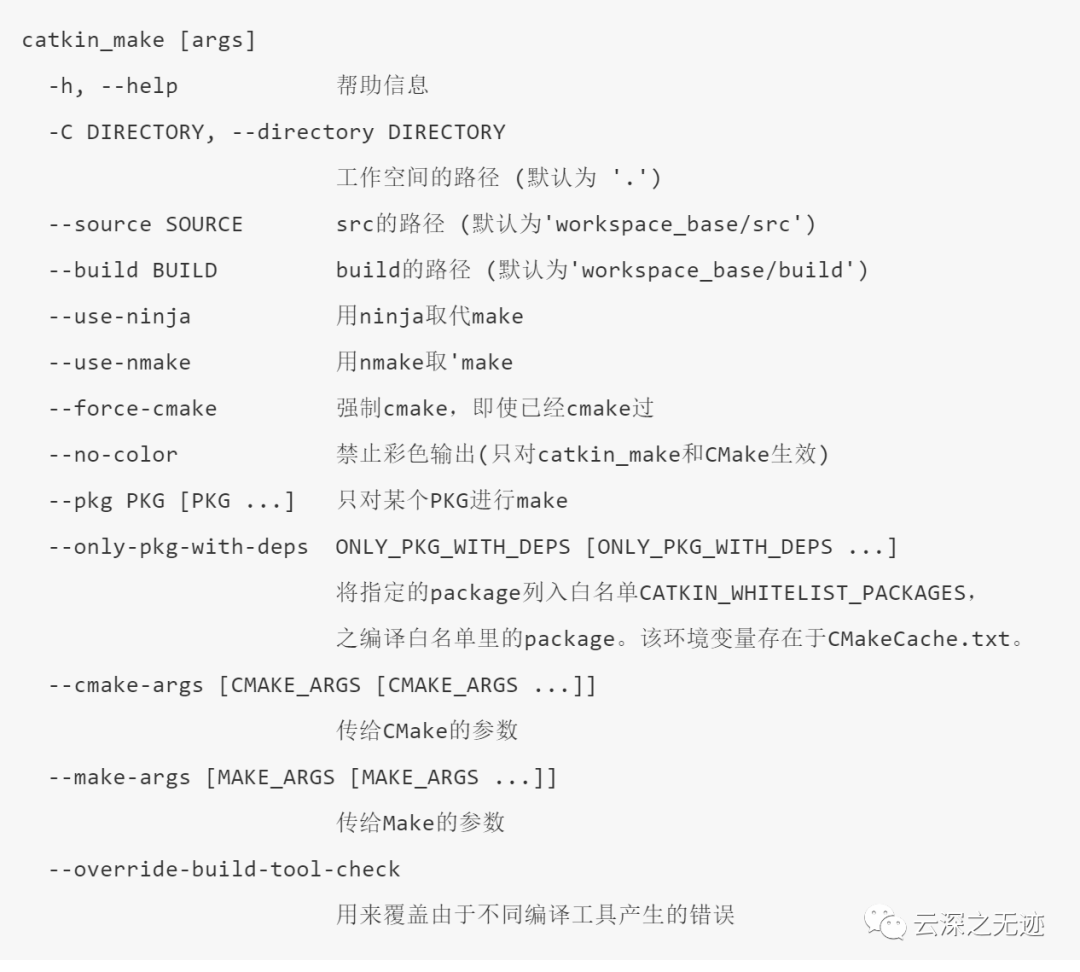
一些常见的编译命令
编译流程
编译系统会递归查找
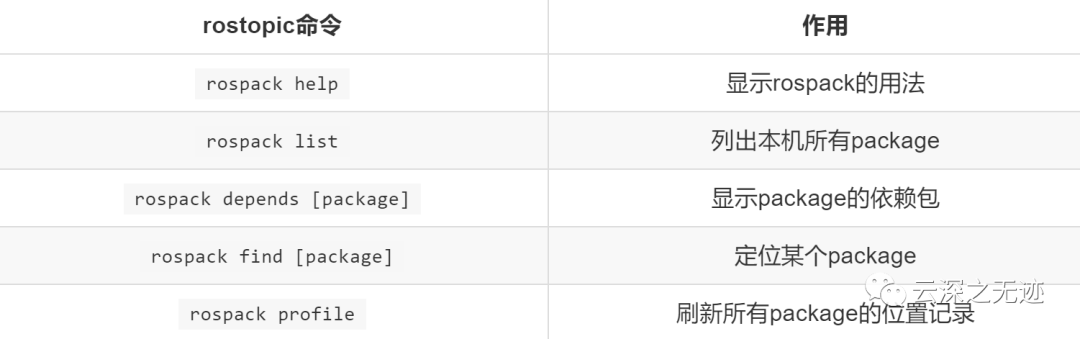

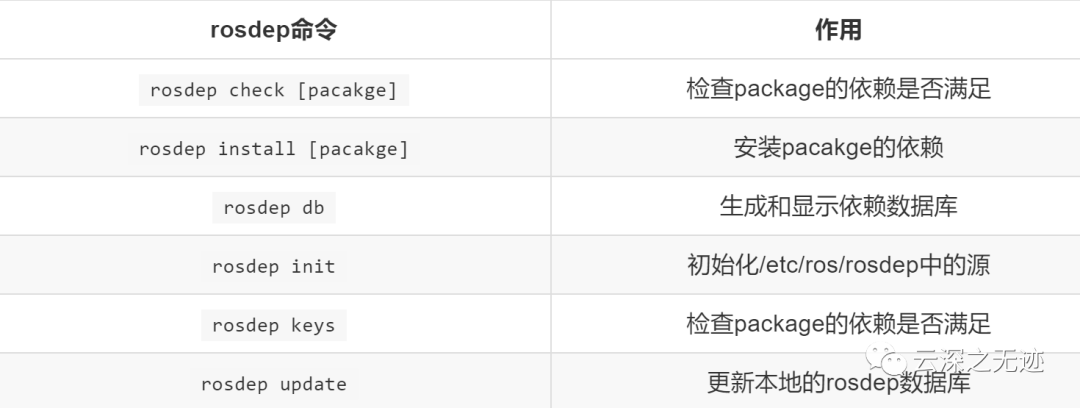
这是常见的ROS命令
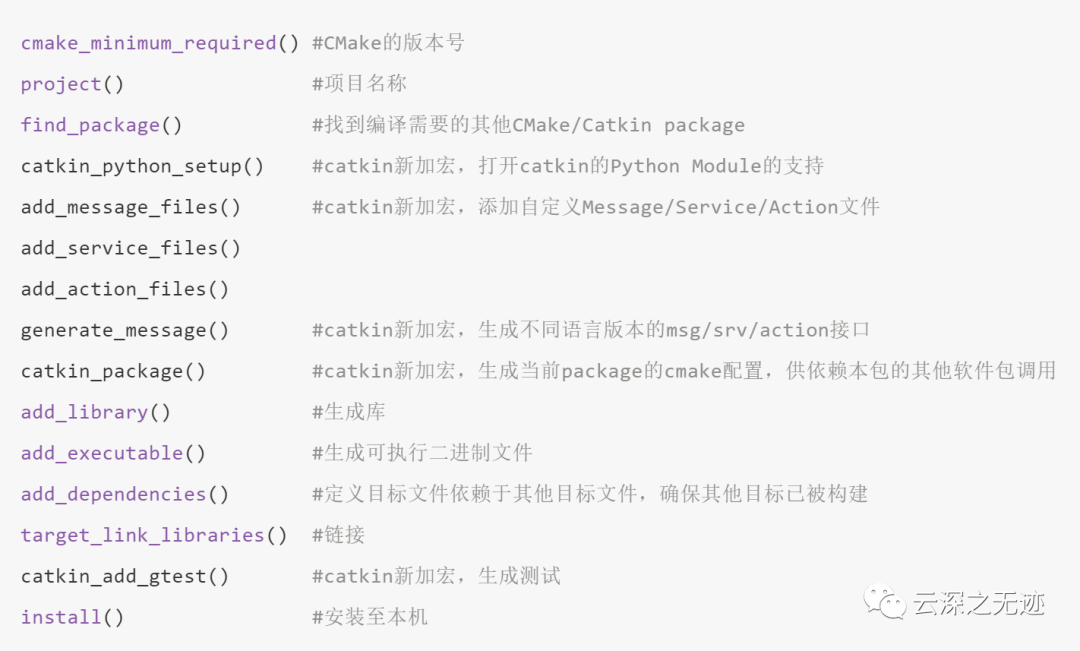
因为Cmake是常客,这里也有Cmake的一个常见函数的说明
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ROS系统是什么?ROS系统主要特点有哪些?创龙RK3568J+Debian的ROS2系统案例2023-11-30 7631
-
RK3562 单板机嵌入式 ROS2 开发指南:环境搭建与工程编译2026-03-27 7668
-
如何移植ROS程序到Android2021-05-16 4709
-
ROS与STM32是如何进行通信的2021-08-11 2087
-
什么是ROS?如何学习ROS?2021-11-11 1541
-
如何利用RK1808去搭建一种ROS交叉编译环境呢2022-02-15 2404
-
ROS放到RK3326板上编译时出现的问题有哪些呢2022-02-17 1809
-
RK3308-CC-PLUS板子启用ROS模块后交叉编译,menuconfig中没有ROS选项怎么解决?2022-03-09 914
-
在FirePrime开发板上编译安装ROS jade2022-07-07 2579
-
ROS在Zedboard上的移植2018-10-26 1439
-
ROS与STM32通信2021-12-24 1209
-
如何配置ROS驱动功能包2023-11-22 3532
-
ros的基本概念是什么2023-11-27 3142
-
AI编译器技术剖析2024-07-17 4809
-
RK3576单板机玩转ROS2:通信测试+编译部署全流程详解2026-05-16 422
全部0条评论

快来发表一下你的评论吧 !
