

ROS系统的本地搭建(上)
电子说
1.4w人已加入
描述
有关ROS系统的相关知识已经在上一篇文章中进行了阐述,在本篇文章中,将就ROS的进一步搭建方法做阐述。
⚠️:本文中“消息代理”、“主服务器”、“Master Server”是相同的意思,可以互换。
0× 1
关于版本选择
目前稳定的ROS系统有三个版本可供选择
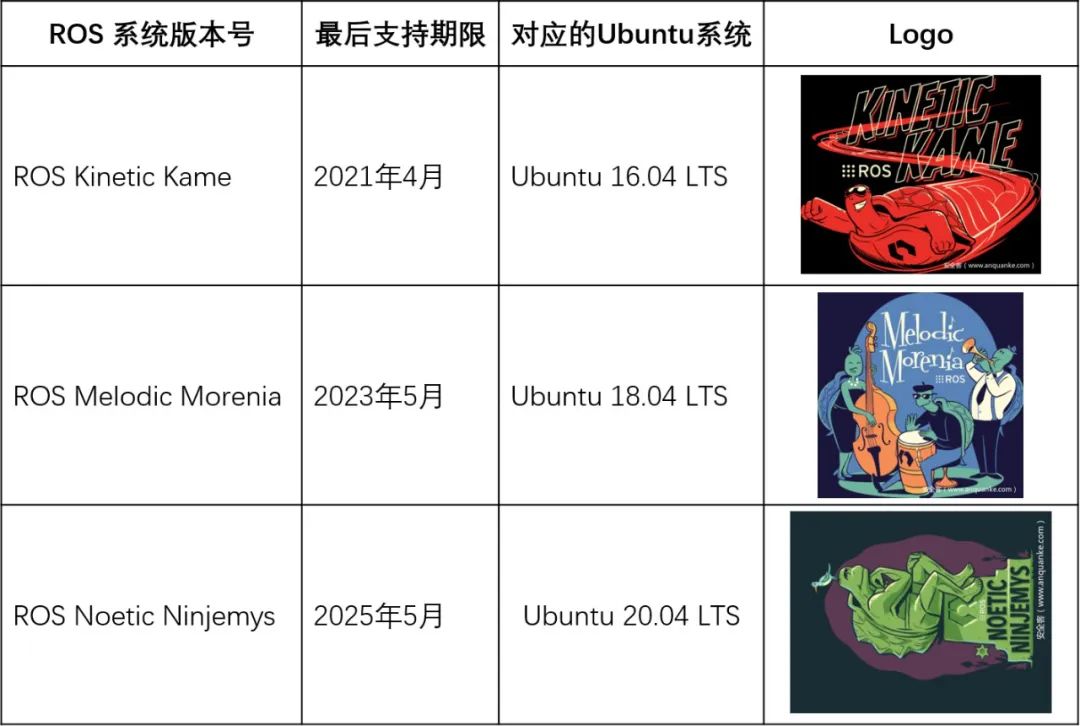
我们此处以ROS Melodic Morenia为例进行本地环境的搭建,选用Ubuntu 18.04 LTS。
⚠️:尽管实际的ROS交互并不需要任何的图形化界面,但是为了演示方便,我们此处还是选用带有用户图形界面的Desktop版本。
0× 2
本地搭建ROS环境
-
配置apt仓库
使用以下命令启用restricted、universe和multiverse存储库。
sudo add-apt-repository "deb http://archive.ubuntu.com/ubuntu $(lsb_release -sc) main universe restricted multiverse"
这里也可以换成阿狸云的存储库链接,但是必须是包含restricted、universe和multiverse的。
-
配置sources.list
使用以下命令启用ros存储库。
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
这里给出一些其他的镜像源以供选择:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
使用myCobot 280机械臂结合ROS2系统搭建机械分拣站2025-01-15 2505
-
本地电脑如何搭建云电脑,本地电脑搭建云电脑的步骤2024-12-23 2122
-
超级干货!本地搭建代码托管平台Gitea2024-12-19 1831
-
ROS系统的本地搭建(下)2023-05-19 1377
-
搭建ARM+ROS的硬件载体之ROS的移植及测试方法2023-03-09 1548
-
如何低成本搭建ARM+ROS的硬件载体?2022-10-13 3178
-
实现ARM+ROS(机器人操作系统)之运行ROS!2022-10-10 2341
-
实现ARM+ROS(机器人操作系统)之环境搭建!2022-09-28 2132
-
Micro-ROS:把ROS2放在MCU上2022-04-07 10786
-
如何搭建实体机器人ros底盘2022-01-20 2415
-
如何去搭建一个基于ROS系统的平衡车呢2021-11-08 2955
-
如何在ROS的基础上提升无人驾驶系统的可靠性2021-02-15 5065
-
如何搭建本地smtp服务器2018-04-08 20220
-
本地测试环境搭建2018-01-31 3622
全部0条评论

快来发表一下你的评论吧 !
